- 物联网:全面概述、架构、应用、仿真工具、挑战和未来方向
神一样的老师
论文阅读分享物联网物联网
中文论文标题:物联网:全面概述、架构、应用、仿真工具、挑战和未来方向英文论文标题:InternetofThings:acomprehensiveoverview,architectures,applications,simulationtools,challengesandfuturedirections作者信息:AnitaChoudhary论文出处:DiscoverInternetofThing
- python面试题目365道_[Python]百姓网的面试题
筹朩无双
python面试题目365道
1#-*-coding:utf-8-*-23classBTree:4def__init__(self,data):5self.l=None6self.r=None7self.data=data89definsertl(self,ltree):10self.l=ltree1112definsertr(self,rtree):13self.r=rtree1415defprintTree(self,in
- AAAI2024论文解读|Towards Fairer Centroids in k-means Clustering面向更公平的 k 均值聚类中心
paixiaoxin
文献阅读论文合集支持向量机机器学习人工智能聚类公平性k均值聚类质心代表性群体代表性公平性
论文标题TowardsFairerCentroidsink-meansClustering面向更公平的k均值聚类中心论文链接TowardsFairerCentroidsink-meansClustering论文下载论文作者StanleySimoes,DeepakP,MuirisMacCarthaigh内容简介本文提出了一种新的聚类级质心公平性(Cluster-levelCentroidFairne
- 132道系统架构面试八股文(答案、分析和深入提问)整理
ocean2103
面试题系统架构面试职场和发展
1.谈一谈缓存穿透、缓存击穿和缓存雪崩,以及解决办法回答在系统架构中,缓存是一种重要的性能优化手段,但在实际使用中可能会遭遇一些问题,如缓存穿透、缓存击穿和缓存雪崩。下面分别解释这三种现象及其解决方法。1.缓存穿透定义:缓存穿透是指用户请求的数据在缓存和数据库中都不存在,导致每次请求都直接查询数据库,造成对数据库的压力。解决办法:参数校验:在请求到达缓存和数据库之前,进行参数校验,拒绝无效请求。使
- stop调度类
liqb365
Linuxlinux
摘自笔者原创的《Linux原理》草稿相关段落。本文基于5.15.133版本讨论。2.4.1stop2.4.1.1stop简介众所周知,Linux内核包含五个调度类。它们分别是stop,deadline,RT,CFS和Idle。每次调度,其调度的顺序按照排序先后进行。所以,stop调度类拥有每次调度的最高优先权。在stop机制中,可以借用经济学中消费者和生产者的概念来比喻该机制运行中非常重要的两部分
- dump_stack在ARM64架构的实现
liqb365
linux
dump_stack函数可以帮助我们回溯内核调用栈的先后顺序,比如:本文基于5.15.133版本讨论dump_stack在ARM64架构上的实现。dump_stack的实现与架构有关,但是原理都是通过回溯栈帧。在ARM64架构上,栈回溯的实现在arch/arm64/kernel/stacktrace.c的dump_backtrace函数中实现,其调用的流程是:编号函数文件1dump_stackli
- 【华为OD-E卷 - 第k个排列 100分(python、java、c++、js、c)】
CodeClimb
算法题华为od(A+B+C+D+E卷)收录分享python华为odjavac++javascript
【华为OD-E卷-第k个排列100分(python、java、c++、js、c)】题目给定参数n,从1到n会有n个整数:1,2,3,…,n,这n个数字共有n!种排列。按大小顺序升序列出所有排列的情况,并一一标记,当n=3时,所有排列如下:“123”“132”“213”“231”“312”“321”给定n和k,返回第k个排列输入描述输入两行,第一行为n,第二行为k,给定n的范围是[1,9],给定k的
- Linux内核中本地IRQ开关在ARM64架构上的实现
liqb365
Linuxlinux架构
A.1.1概述本文基于Linux5.15.133版本论述。本地CPU的IRQ关闭一般可以使用local_irq_save或者local_irq_disable,开启IRQ则相应的使用local_irq_restore和local_irq_enable。本文主要分析这些函数在ARM64架构上的实现。A.1.2开关中断首先看local_irq_disable。local_irq_disable本质上是
- iOS APP 上架审核被拒Guideline 4.3 - Design,2.1,2.3.1,5.1.1解决方案
搬砖的前端
uniapp技术栈及多端开发iosappstore4.32.15.1.1
iOSAPP上架审核被拒Guideline4.3-Design,2.1,2.3.1,5.1.1解决方案4.3解决原理:https://blog.csdn.net/huazaihahha/article/details/136659489其他以及具体执行步骤:https://juejin.cn/post/7277395050509844537
- JAVA计算机毕业设计基于SpringBoot的个人理财系统(附源码+springboot+开题+论文)
杰简程序毕设
java课程设计springboot
本系统(程序+源码)带文档lw万字以上文末可获取一份本项目的java源码和数据库参考。系统程序文件列表开题报告内容研究背景随着经济的快速发展和人们生活水平的日益提高,个人理财已成为现代生活中不可或缺的一部分。然而,传统的理财方式往往存在着效率低下、信息不对称、服务不便捷等问题,无法满足现代人对于个性化、高效理财的需求。在这个背景下,基于SpringBoot的个人理财系统应运而生。该系统旨在通过互联
- AIGC视频生成国产之光:ByteDance的PixelDance模型
好评笔记
AIGC-视频补档AIGC计算机视觉人工智能深度学习机器学习论文阅读面试
大家好,这里是好评笔记,公主号:Goodnote,专栏文章私信限时Free。本文详细介绍ByteDance的视频生成模型PixelDance,论文于2023年11月发布,模型上线于2024年9月,同时期上线的模型还有Seaweed(论文未发布)。优质专栏回顾:机器学习笔记深度学习笔记多模态论文笔记AIGC—图像文章目录论文摘要引言输入训练和推理时的数据处理总结相关工作视频生成长视频生成方法模型架构
- 亮相AICon,火山引擎边缘云揭秘边缘AI Agent探索与实践
边缘计算智能硬件ai开发
12月13-14日,AICon全球人工智能开发与应用大会在北京成功举办。火山引擎边缘智能技术负责人谢皓受邀出席大会,以《AIAgent在边缘云的探索与实践》为主题,与全球AI领域的资深专家,共同深入探讨大模型落地、具身智能、多模态大模型、AIAgent等前沿技术如何推动行业变革、引领未来发展。火山引擎边缘智能技术负责人谢皓指出,随着AI时代的到来,边缘智能由传统的物联网、智慧物联,逐渐演变成智能体
- 论文阅读笔记:AI+RPA
几道之旅
人工智能
文章目录论文题目下载地址论文摘要论文题目Challengesandopportunities:ImplementingRPAandAIinfrauddetectioninthebankingsector下载地址点击这里下载论文摘要在银行业中,将机器人流程自动化(RPA)和人工智能(AI)集成用于欺诈检测是一项重大变革,既带来了挑战,也带来了机遇。随着金融机构面临日益复杂的欺诈企图,RPA和AI成为
- 新星计划Day11【数据结构与算法】 排序算法2
京与旧铺
java学习排序算法java算法
新星计划Day11【数据结构与算法】排序算法2博客主页:京与旧铺的博客主页✨欢迎关注点赞收藏⭐留言✒本文由京与旧铺原创,csdn首发!系列专栏:java学习参考网课:尚硅谷首发时间:2022年5月13日你做三四月的事,八九月就会有答案,一起加油吧如果觉得博主的文章还不错的话,请三连支持一下博主哦最后的话,作者是一个新人,在很多方面还做的不好,欢迎大佬指正,一起学习哦,冲冲冲推荐一款模拟面试、刷题
- LeetCode 1133:最大唯一数
MasterNeverDown
LeetCodeleetcode数据结构算法
markdown复制LeetCode1133:最大唯一数在编程的世界里,我们常常会遇到一些有趣的问题,今天就让我们一起来看看LeetCode上的第1133题——最大唯一数。题目描述给你一个整数数组A,请找出并返回在该数组中仅出现一次的最大整数。如果不存在这个只出现一次的整数,则返回-1。示例示例1:输入:[5,7,3,9,4,9,8,3,1]输出:8解释:数组中最大的整数是9,但它在数组中重复出现
- k8s_CKA考试_学习笔记
bq_o_pd
kuberneteslinux容器笔记
k3s默认无法使用docker,导入docker的镜像加载到k3s中[root@worker1php]#k3scrictlimagesIMAGETAGIMAGEIDSIZEdocker.io/library/busyboxlatest9211bbaa0dbd62.23MBdocker.io/library/nginx1.7.935d28df486f6139.9MBdocker.io/library
- 【RK3588 docker编译问题】
kaikai_1019
RK3588dockerdocker容器运维
问题集合问题1:编译lunch出现问题12:31:21Buildsandboxingdisabledduetonsjailerror.12:31:22Buildsandboxingdisabledduetonsjailerror.Infileincludedfrombuild/make/core/config.mk:313:Infileincludedfrombuild/make/core/env
- LINUX常用命令 一
夜颂春秋
linux服务器运维
1.cd2.pwd3.ls4.passwd5.who6.cat7.mkdir8.rmdir9.chmod10.chown11.chgrp12.touch13.cp14.mv15.rm16.find17.grep18.more19.less20.head21.tail22.cut23.crontab24.sleep25.kill26.ps28.top29.man,info30.alias31.una
- Ubuntu 24.04 LTS 通过 docker desktop 安装 seafile 搭建个人网盘
Kasen's experience
#UbuntuubuntudockerlinuxSeafile
准备Ubuntu24.04LTSUbuntu空闲硬盘挂载Ubuntu安装DockerDesktop[我的Ubuntu服务器折腾集](https://blog.csdn.net/jh1513/article/details/145222679。安装seafile参考资料Docker安装Seafile+OnlyOffice并配置OnlyOffice到Seafile,实现在线编辑功能官方教程用Docke
- svn clean up 时 .svn\pristine\cc\cca2e58e9e310a113a37e3bd87eae3a42434e899.svn-base 找不到文件解决方法
hookby
起因是SVN上一文件缺失导致无法更新执行cleanup命令,然后报这个错误.svn\pristine\cc\cca2e58e9e310a113a37e3bd87eae3a42434e899.svn-base找不到文件解决方法找到相应目录后发现没有该文件然后复制了任意一个该文件夹内文件,并命名为缺失文件,再次操作,成功~原因在猜测中
- NAT静态原理NAT动态原理NAPT原理
aicc221016
计算机网络网络智能路由器
现网:环境dev开发环境,开发专用sit:测试环境。测试人员用的,需要的测试的代码,程序之类的都会在测试环境运行。pre:预生产环境。在版本最后上线之前会在预生产最后执行一遍。确保万无一失(狗头)运维,也有测试。prd:生产环境/现网:10运维人员。数据库3DBA数据库运维。100.00129.9999991201361.36私网访问公网的过程:百度192.168.233.10(主机ip)180.
- 【AI日记】25.01.06
AI完全体
AI日记人工智能机器学习kaggle比赛
【AI论文解读】【AI知识点】【AI小项目】【AI战略思考】【AI日记】【读书与思考】AI参加:kaggle比赛ForecastingStickerSales读书书名:国家为什么会失败阅读原因:2024年诺贝尔经济学奖得主的力作,之前我已经读过他另一本书了《權力與進步》备注:有兴趣的建议读未删减版https://book.douban.com/subject/26388427/discussion
- 文献综述相关ChatGPT提示词分享
AIWritePaper官方账号
PromptChatGPTAIWritePaperchatgpt人工智能数据分析AIGC信息可视化数据挖掘prompt
文献综述ChatGPT可以帮助提高文献综述的有效性和全面性。ChatGPT可以高效搜索和审查与宝子们课题研究相关的文献资料来源。一些给力的插件工具还可以帮助您总结复杂的研究论文并提取信息以更快更好地消化信息。合理的运用ChatGPT和GPTs可以提高文献综述的清晰度和质量,使其更加全面和有洞察力。文献综述提示词*131.在[人工智能相关]领域中,主要发现有哪些?2.在[人工智能相关]领域中,引用次
- 【YOLOv8改进】 YOLOv8 更换骨干网络之 GhostNet :通过低成本操作获得更多特征 (论文笔记+引入代码)
YOLO大师
YOLO论文阅读
YOLO目标检测创新改进与实战案例专栏专栏目录:YOLO有效改进系列及项目实战目录包含卷积,主干注意力,检测头等创新机制以及各种目标检测分割项目实战案例专栏链接:YOLO基础解析+创新改进+实战案例介绍摘要在嵌入式设备上部署卷积神经网络(CNNs)由于有限的内存和计算资源而变得困难。特征图中的冗余是那些成功的CNNs的一个重要特性,但在神经架构设计中很少被研究。本文提出了一种新颖的Ghost模块,
- 论文阅读:Deep Bilateral Learning for Real-Time Image Enhancement-google-hdrnet-slicing
SetMaker
论文阅读
项目地址:https://gitcode.com/google/hdrnethdrnet作为超分领域的经典文章,由google提出主要用来用轻量化的方法来实现高分辨率的图像生成,hdrnet结合cnn可以让更高分辨率的图像部署在板端。如图所示,原始图像比如4k图像,首先分为两个主要模块:grid和guide。grid就是对应图上面的那一条特征提取网络,具体来说,原始图像经过下采样之后,默认256分
- MySql场景面试题:满意度调查分组去除最高最低求平均分
码到三十五
mysql高手mysqlspringbootspringcloud分布式数据分析数据挖掘
❃博主首页:「码到三十五」,同名公众号:「码到三十五」,wx号:「liwu0213」☠博主专栏:♝博主的话:搬的每块砖,皆为峰峦之基;公众号搜索「码到三十五」关注这个爱发技术干货的coder,一起筑基场景描述我们有一个员工满意度调查系统,数据库中有一张表:survey_scores表:存储员工对公司的满意度打分。表结构如下:--调查打分表CREATETABLEsurvey_scores(score
- OpenVoiceV2:零样本跨语言语音克隆技术,支持多种风格控制
智慧医疗
AIGC语音识别人工智能语音克隆
1openvoicev2介绍语音克隆技术近年来取得了显著进展,但现有方法通常存在着局限性,例如无法灵活控制语音风格、需要大量多语言数据进行训练、生成速度慢等等。为了克服这些挑战,MyShell.ai团队推出了全新的语音克隆技术OpenVoiceV2,它能够在无需额外训练的情况下,仅凭少量参考音频,就能够克隆任何人的声音,并支持多种语音风格控制,以及快速高效的跨语言语音生成。论文地址:http://
- 华为OD机试E卷 --第k个排列 --24年OD统一考试(Java & JS & Python & C & C++)
飞码创造者
最新华为OD机试题库2024华为odjavajavascriptc语言python
文章目录题目描述输入描述输出描述用例题目解析JS算法源码java算法源码python算法源码c算法源码c++算法源码题目描述给定参数n,从1到n会有n个整数:1,2,3,…,n,这n个数字共有nl种排列。按大小顺序升序列出所有排列的情况,并——标记,当n=3时,所有排列如下:“123"“132”“213”“231"“312"“321”给定n和k,返回第k个排列。输入描述输入两行,第一行为n,第二行
- 你不知道的javascript-13(var的接替者let与const)
我爱学习_zwj
你不知道的javascriptjavascript前端开发语言面试
1.let与const的基本使用在ES5中我们声明变量都是使用的var(variable)关键字,从ES6开始新增了两个关键字可以声明变量:let、constlet、const在其他编程语言中都是有的,所以也并不是新鲜的关键字但是let、const确确实实给JavaScript带来一些不一样的东西从使用角度来说,只是在原有基础上换一个名字而已,使用的位置和方式是一样的varname='zs'let
- 国产海光CPU平台兼容性指南-基础软件分册-20231013(附各系统下载链接)
技术瘾君子1573
服务器&存储服务器兼容列表海光CPU云计算大数据操作系统
目录声明一、操作系统二、虚拟化和云2.1虚拟化和云2.2虚拟机上的操作系统2.2.1VMwarevSphere上的虚拟机操作系统2.2.2KVM上的虚拟机操作系统2.2.3WindowsHyper-V上的虚拟机操作系统2.2.4VirtualBox上的虚拟机操作系统三、分布式存储四、数据库五、中间件六、大数据七、平台组件7.1云平台7.2大数据平台7.3人工智能平台7.4科学与工程计算平台八、其它
- 多线程编程之卫生间
周凡杨
java并发卫生间线程厕所
如大家所知,火车上车厢的卫生间很小,每次只能容纳一个人,一个车厢只有一个卫生间,这个卫生间会被多个人同时使用,在实际使用时,当一个人进入卫生间时则会把卫生间锁上,等出来时打开门,下一个人进去把门锁上,如果有一个人在卫生间内部则别人的人发现门是锁的则只能在外面等待。问题分析:首先问题中有两个实体,一个是人,一个是厕所,所以设计程序时就可以设计两个类。人是多数的,厕所只有一个(暂且模拟的是一个车厢)。
- How to Install GUI to Centos Minimal
sunjing
linuxInstallDesktopGUI
http://www.namhuy.net/475/how-to-install-gui-to-centos-minimal.html
I have centos 6.3 minimal running as web server. I’m looking to install gui to my server to vnc to my server. You can insta
- Shell 函数
daizj
shell函数
Shell 函数
linux shell 可以用户定义函数,然后在shell脚本中可以随便调用。
shell中函数的定义格式如下:
[function] funname [()]{
action;
[return int;]
}
说明:
1、可以带function fun() 定义,也可以直接fun() 定义,不带任何参数。
2、参数返回
- Linux服务器新手操作之一
周凡杨
Linux 简单 操作
1.whoami
当一个用户登录Linux系统之后,也许他想知道自己是发哪个用户登录的。
此时可以使用whoami命令。
[ecuser@HA5-DZ05 ~]$ whoami
e
- 浅谈Socket通信(一)
朱辉辉33
socket
在java中ServerSocket用于服务器端,用来监听端口。通过服务器监听,客户端发送请求,双方建立链接后才能通信。当服务器和客户端建立链接后,两边都会产生一个Socket实例,我们可以通过操作Socket来建立通信。
首先我建立一个ServerSocket对象。当然要导入java.net.ServerSocket包
ServerSock
- 关于框架的简单认识
西蜀石兰
框架
入职两个月多,依然是一个不会写代码的小白,每天的工作就是看代码,写wiki。
前端接触CSS、HTML、JS等语言,一直在用的CS模型,自然免不了数据库的链接及使用,真心涉及框架,项目中用到的BootStrap算一个吧,哦,JQuery只能算半个框架吧,我更觉得它是另外一种语言。
后台一直是纯Java代码,涉及的框架是Quzrtz和log4j。
都说学前端的要知道三大框架,目前node.
- You have an error in your SQL syntax; check the manual that corresponds to your
林鹤霄
You have an error in your SQL syntax; check the manual that corresponds to your MySQL server version for the right syntax to use near 'option,changed_ids ) values('0ac91f167f754c8cbac00e9e3dc372
- MySQL5.6的my.ini配置
aigo
mysql
注意:以下配置的服务器硬件是:8核16G内存
[client]
port=3306
[mysql]
default-character-set=utf8
[mysqld]
port=3306
basedir=D:/mysql-5.6.21-win
- mysql 全文模糊查找 便捷解决方案
alxw4616
mysql
mysql 全文模糊查找 便捷解决方案
2013/6/14 by 半仙
[email protected]
目的: 项目需求实现模糊查找.
原则: 查询不能超过 1秒.
问题: 目标表中有超过1千万条记录. 使用like '%str%' 进行模糊查询无法达到性能需求.
解决方案: 使用mysql全文索引.
1.全文索引 : MySQL支持全文索引和搜索功能。MySQL中的全文索
- 自定义数据结构 链表(单项 ,双向,环形)
百合不是茶
单项链表双向链表
链表与动态数组的实现方式差不多, 数组适合快速删除某个元素 链表则可以快速的保存数组并且可以是不连续的
单项链表;数据从第一个指向最后一个
实现代码:
//定义动态链表
clas
- threadLocal实例
bijian1013
javathreadjava多线程threadLocal
实例1:
package com.bijian.thread;
public class MyThread extends Thread {
private static ThreadLocal tl = new ThreadLocal() {
protected synchronized Object initialValue() {
return new Inte
- activemq安全设置—设置admin的用户名和密码
bijian1013
javaactivemq
ActiveMQ使用的是jetty服务器, 打开conf/jetty.xml文件,找到
<bean id="adminSecurityConstraint" class="org.eclipse.jetty.util.security.Constraint">
<p
- 【Java范型一】Java范型详解之范型集合和自定义范型类
bit1129
java
本文详细介绍Java的范型,写一篇关于范型的博客原因有两个,前几天要写个范型方法(返回值根据传入的类型而定),竟然想了半天,最后还是从网上找了个范型方法的写法;再者,前一段时间在看Gson, Gson这个JSON包的精华就在于对范型的优雅简单的处理,看它的源代码就比较迷糊,只其然不知其所以然。所以,还是花点时间系统的整理总结下范型吧。
范型内容
范型集合类
范型类
- 【HBase十二】HFile存储的是一个列族的数据
bit1129
hbase
在HBase中,每个HFile存储的是一个表中一个列族的数据,也就是说,当一个表中有多个列簇时,针对每个列簇插入数据,最后产生的数据是多个HFile,每个对应一个列族,通过如下操作验证
1. 建立一个有两个列族的表
create 'members','colfam1','colfam2'
2. 在members表中的colfam1中插入50*5
- Nginx 官方一个配置实例
ronin47
nginx 配置实例
user www www;
worker_processes 5;
error_log logs/error.log;
pid logs/nginx.pid;
worker_rlimit_nofile 8192;
events {
worker_connections 4096;}
http {
include conf/mim
- java-15.输入一颗二元查找树,将该树转换为它的镜像, 即在转换后的二元查找树中,左子树的结点都大于右子树的结点。 用递归和循环
bylijinnan
java
//use recursion
public static void mirrorHelp1(Node node){
if(node==null)return;
swapChild(node);
mirrorHelp1(node.getLeft());
mirrorHelp1(node.getRight());
}
//use no recursion bu
- 返回null还是empty
bylijinnan
javaapachespring编程
第一个问题,函数是应当返回null还是长度为0的数组(或集合)?
第二个问题,函数输入参数不当时,是异常还是返回null?
先看第一个问题
有两个约定我觉得应当遵守:
1.返回零长度的数组或集合而不是null(详见《Effective Java》)
理由就是,如果返回empty,就可以少了很多not-null判断:
List<Person> list
- [科技与项目]工作流厂商的战略机遇期
comsci
工作流
在新的战略平衡形成之前,这里有一个短暂的战略机遇期,只有大概最短6年,最长14年的时间,这段时间就好像我们森林里面的小动物,在秋天中,必须抓紧一切时间存储坚果一样,否则无法熬过漫长的冬季。。。。
在微软,甲骨文,谷歌,IBM,SONY
- 过度设计-举例
cuityang
过度设计
过度设计,需要更多设计时间和测试成本,如无必要,还是尽量简洁一些好。
未来的事情,比如 访问量,比如数据库的容量,比如是否需要改成分布式 都是无法预料的
再举一个例子,对闰年的判断逻辑:
1、 if($Year%4==0) return True; else return Fasle;
2、if ( ($Year%4==0 &am
- java进阶,《Java性能优化权威指南》试读
darkblue086
java性能优化
记得当年随意读了微软出版社的.NET 2.0应用程序调试,才发现调试器如此强大,应用程序开发调试其实真的简单了很多,不仅仅是因为里面介绍了很多调试器工具的使用,更是因为里面寻找问题并重现问题的思想让我震撼,时隔多年,Java已经如日中天,成为许多大型企业应用的首选,而今天,这本《Java性能优化权威指南》让我再次找到了这种感觉,从不经意的开发过程让我刮目相看,原来性能调优不是简单地看看热点在哪里,
- 网络学习笔记初识OSI七层模型与TCP协议
dcj3sjt126com
学习笔记
协议:在计算机网络中通信各方面所达成的、共同遵守和执行的一系列约定 计算机网络的体系结构:计算机网络的层次结构和各层协议的集合。 两类服务: 面向连接的服务通信双方在通信之前先建立某种状态,并在通信过程中维持这种状态的变化,同时为服务对象预先分配一定的资源。这种服务叫做面向连接的服务。 面向无连接的服务通信双方在通信前后不建立和维持状态,不为服务对象
- mac中用命令行运行mysql
dcj3sjt126com
mysqllinuxmac
参考这篇博客:http://www.cnblogs.com/macro-cheng/archive/2011/10/25/mysql-001.html 感觉workbench不好用(有点先入为主了)。
1,安装mysql
在mysql的官方网站下载 mysql 5.5.23 http://www.mysql.com/downloads/mysql/,根据我的机器的配置情况选择了64
- MongDB查询(1)——基本查询[五]
eksliang
mongodbmongodb 查询mongodb find
MongDB查询
转载请出自出处:http://eksliang.iteye.com/blog/2174452 一、find简介
MongoDB中使用find来进行查询。
API:如下
function ( query , fields , limit , skip, batchSize, options ){.....}
参数含义:
query:查询参数
fie
- base64,加密解密 经融加密,对接
y806839048
经融加密对接
String data0 = new String(Base64.encode(bo.getPaymentResult().getBytes(("GBK"))));
String data1 = new String(Base64.decode(data0.toCharArray()),"GBK");
// 注意编码格式,注意用于加密,解密的要是同
- JavaWeb之JSP概述
ihuning
javaweb
什么是JSP?为什么使用JSP?
JSP表示Java Server Page,即嵌有Java代码的HTML页面。使用JSP是因为在HTML中嵌入Java代码比在Java代码中拼接字符串更容易、更方便和更高效。
JSP起源
在很多动态网页中,绝大部分内容都是固定不变的,只有局部内容需要动态产生和改变。
如果使用Servl
- apple watch 指南
啸笑天
apple
1. 文档
WatchKit Programming Guide(中译在线版 By @CocoaChina) 译文 译者 原文 概览 - 开始为 Apple Watch 进行开发 @星夜暮晨 Overview - Developing for Apple Watch 概览 - 配置 Xcode 项目 - Overview - Configuring Yo
- java经典的基础题目
macroli
java编程
1.列举出 10个JAVA语言的优势 a:免费,开源,跨平台(平台独立性),简单易用,功能完善,面向对象,健壮性,多线程,结构中立,企业应用的成熟平台, 无线应用 2.列举出JAVA中10个面向对象编程的术语 a:包,类,接口,对象,属性,方法,构造器,继承,封装,多态,抽象,范型 3.列举出JAVA中6个比较常用的包 Java.lang;java.util;java.io;java.sql;ja
- 你所不知道神奇的js replace正则表达式
qiaolevip
每天进步一点点学习永无止境纵观千象regex
var v = 'C9CFBAA3CAD0';
console.log(v);
var arr = v.split('');
for (var i = 0; i < arr.length; i ++) {
if (i % 2 == 0) arr[i] = '%' + arr[i];
}
console.log(arr.join(''));
console.log(v.r
- [一起学Hive]之十五-分析Hive表和分区的统计信息(Statistics)
superlxw1234
hivehive分析表hive统计信息hive Statistics
关键字:Hive统计信息、分析Hive表、Hive Statistics
类似于Oracle的分析表,Hive中也提供了分析表和分区的功能,通过自动和手动分析Hive表,将Hive表的一些统计信息存储到元数据中。
表和分区的统计信息主要包括:行数、文件数、原始数据大小、所占存储大小、最后一次操作时间等;
14.1 新表的统计信息
对于一个新创建
- Spring Boot 1.2.5 发布
wiselyman
spring boot
Spring Boot 1.2.5已在7月2日发布,现在可以从spring的maven库和maven中心库下载。
这个版本是一个维护的发布版,主要是一些修复以及将Spring的依赖提升至4.1.7(包含重要的安全修复)。
官方建议所有的Spring Boot用户升级这个版本。
项目首页 | 源


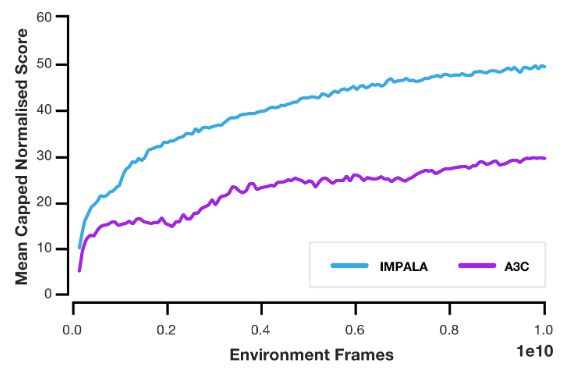
 A2C每次学习都需要暂停,而IMPALA是连续的
A2C每次学习都需要暂停,而IMPALA是连续的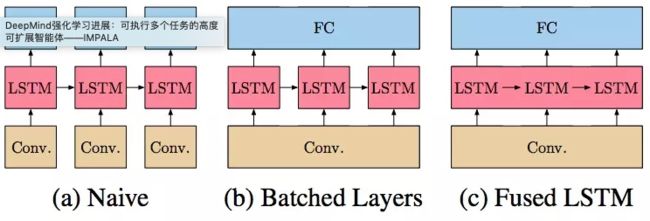 GPU优化:(a)一个正常的LSTM;(b)将batch用于输入层和输出层;(c)将batch融合进整个网络
GPU优化:(a)一个正常的LSTM;(b)将batch用于输入层和输出层;(c)将batch融合进整个网络