一、AR简介:
增强现实技术(Augmented Reality,简称 AR),是一种实时地计算摄影机影像的位置及角度并加上相应图像、视频、3D模型的技术,这种技术的目标是在屏幕上把虚拟世界套在现实世界并进行互动.
一个最简单地AR场景实现所需要的技术以及步骤包含如下:
- 多媒体捕捉现实图像:如摄像头
- 三维建模:3D立体模型
- 传感器追踪:主要追踪现实世界动态物体的六轴变化,这六轴分别是X、Y、Z轴位移及旋转。其中位移三轴决定物体的方位和大小,旋转三周决定物体显示的区域。
- 坐标识别及转换:3D模型显示在现实图像中不是单纯的frame坐标点,而是一个三维的矩阵坐标。这基本上也是学习AR最难的部分,好在ARKit帮助我们大大简化了这一过程。
- 除此之外,AR还可以与虚拟物体进行一些交互。
二、 ARKit概述及特点介绍:
- ARKit是2017年6月6日,苹果发布iOS11系统所新增框架,它能够帮助我们以最简单快捷的方式实现AR技术功能。
- ARKit框架提供了两种AR技术:
- 基于3D场景(SceneKit)实现的增强现实,
- 基于2D场景(SpriktKit)实现的增强现实
- AR效果必须要依赖于苹果的游戏引擎框架(3D引擎SceneKit,2D引擎SpriktKit),主要原因是游戏引擎才可以加载物体模型。
- 虽然ARKit框架中视图对象继承于UIView,但是由于目前ARKit框架本身只包含相机追踪,不能直接加载物体模型,所以只能依赖于游戏引擎加载ARKit
开发环境:
- Xcode版本:Xcode9及以上
- iOS系统:iOS11及以上
- iOS设备要求:处理器A9及以上(iPhone6s 、iPhone6sPlus、iPhone7 iPhone7Plus、iPhoneSE、iPad Pro(9.7、10.5、12.9)、iPad(2017))
- MacOS系统:10.12.4及以上 (安装Xcode9对Mac系统版本有要求)
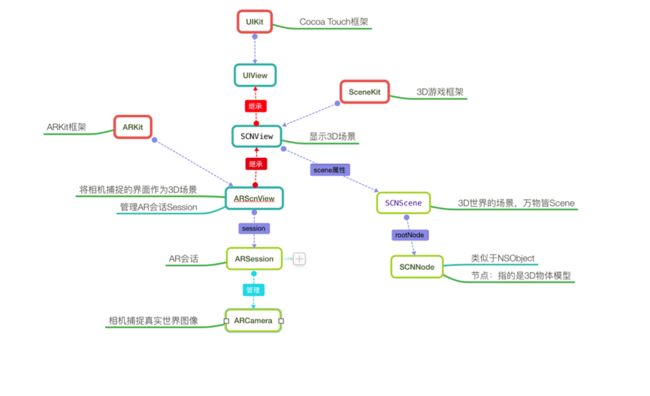
三、ARKit框架简介:
ARKit并不是一个独立就能够运行的框架,而是必须要SceneKit一起用才可以,换一句话说,如果只有ARKit,而没有SceneKit,那么ARKit和一般的相机没有任何区别。
相机捕捉现实世界图像,由ARKit来实现;在图像中显示虚拟3D模型,由SceneKit来实现。
继承关系:ARKit框架中中显示3D虚拟增强现实的视图ARSCNView继承于SceneKit框架中的SCNView,而SCNView又继承于UIKit框架中的UIView;
UIView的作用是将视图显示在iOS设备的window中,SCNView的作用是显示一个3D场景,ARScnView的作用也是显示一个3D场景,只不过这个3D场景是由摄像头捕捉到的现实世界图像构成
ARSCNView只是一个视图容器,它的作用是管理一个ARSession
在一个完整的虚拟增强现实体验中,ARKit框架只负责将真实世界画面转变为一个3D场景,这一个转变的过程主要分为两个环节:由ARCamera负责捕捉摄像头画面,由ARSession负责搭建3D场景。
ARKit在3D现实场景中添加虚拟物体使用的是父类SCNView的功能,这个功能早在iOS8时就已经添加(SceneKit是iOS8新增),ARSCNView所有跟场景和虚拟物体相关的属性及方法都是自己父类SCNView的。
四、ARKit工作原理及工作流程
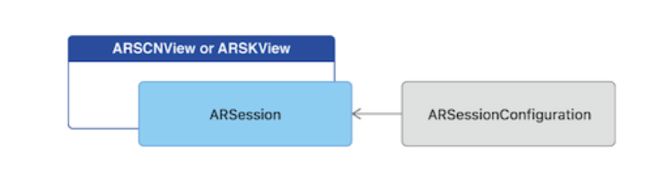
ARKit提供两种虚拟增强现实视图,他们分别是3D效果的ARSCNView和2D效果的ARSKView。无论是使用哪一个视图都是用了相机图像作为背景视图,而这一个相机的图像就是由
ARSCNView与ARCamera两者之间并没有直接的关系,它们之间是通过AR会话,也就是ARKit框架中非常重量级的一个类ARSession来搭建沟通桥梁的。
要想运行一个ARSession会话,你必须要指定一个称之为ARSessionConfiguration(会话追踪配置)的对象,ARSessionConfiguration的主要目的就是负责追踪相机在3D世界中的位置以及一些特征场景的捕捉(例如平面捕捉)。
ARSessionConfiguration是一个父类,为了更好的看到增强现实的效果,苹果官方建议我们使用它的子类ARWorldTrackingSessionConfiguration,该类只支持A9芯片之后的机型,也就是iPhone6s之后的机型。
ARSession搭建沟通桥梁的参与者主要有两个ARWorldTrackingSessionConfiguration与ARFrame。
ARWorldTrackingSessionConfiguration(会话追踪配置)的作用是跟踪设备的方向和位置,以及检测设备摄像头看到的现实世界的表面。它的内部实现了一系列非常庞大的算法计算以及调用了你的iPhone必要的传感器来检测手机的移动及旋转甚至是翻滚。
当ARWorldTrackingSessionConfiguration计算出相机在3D世界中的位置时,它本身并不持有这个位置数据,而是将其计算出的位置数据交给ARSession去管理,而相机的位置数据对应的类就是ARFrame。
ARSession类一个属性叫做currentFrame,维护的就是ARFrame这个对象。
ARCamera只负责捕捉图像,不参与数据的处理。它属于3D场景中的一个环节,每一个3D Scene都会有一个Camera,它觉得了我们看物体的视野。

ARKit框架工作流程:
- ARSCNView加载场景SCNScene
- SCNScene启动相机ARCamera开始捕捉场景
- 捕捉场景后ARSCNView开始将场景数据交给Session
- Session通过管理ARSessionConfiguration实现场景的追踪并且返回一个ARFrame
- 给ARSCNView的scene添加一个子节点(3D物体模型)

ARSessionConfiguration捕捉相机3D位置的意义就在于能够在添加3D物体模型的时候计算出3D物体模型相对于相机的真实的矩阵位置,在3D坐标系统中,有一个世界坐标系和一个本地坐标系。类似于UIView的Frame和Bounds的区别。
五、ARKit全框架API类图介绍:
5.1、ARAnchor
ARAnchor表示一个物体在3D空间的位置和方向(ARAnchor通常称为物体的3D锚点,有点像UIKit框架中CALayer的Anchor), ARFrame表示的也是物体的位置和方向,但是ARFrame通常表示的是AR相机的位置和方向以及追踪相机的时间,还可以捕捉相机的帧图片。也就是说ARFrame用于捕捉相机的移动,其他虚拟物体用ARAnchor
//标识符
@property (nonatomic, readonly) NSUUID *identifier;
//锚点的旋转变换矩阵,定义了锚点的旋转、位置、缩放。是一个4x4的矩阵(读者可以自行科普什么叫4x4矩阵)
@property (nonatomic, readonly) matrix_float4x4 transform;
//构造方法,一般我们无需构造。因为添加一个3D物体时ARKit会有代理告知我们物体的锚点
- (instancetype)initWithTransform:(matrix_float4x4)transform;
5.2、ARCamera
ARCamera是一个相机,它是连接虚拟场景与现实场景之间的枢纽。在ARKit中,它是捕捉现实图像的相机,在SceneKit中它又是3D虚拟世界中的相机。
一般我们无需去创建一个相机,因为当我们初始化一个AR试图时,他会为我们默认创建一个相机,而且这个相机就是摄像头的位置,同时也是3D世界中的原点所在(x=0,y=0,z=0)
@interface ARCamera : NSObject
/**
4x4矩阵表示相机位置,同ARAnchor
*/
@property (nonatomic, readonly) matrix_float4x4 transform;
/**
相机方向(旋转)的矢量欧拉角
分别是x/y/z
*/
@property (nonatomic, readonly) vector_float3 eulerAngles;
/**
相机追踪状态(在下方会有枚举值介绍)
*/
@property (nonatomic, readonly) ARTrackingState trackingState NS_REFINED_FOR_SWIFT;
/**
追踪运动类型
*/
@property (nonatomic, readonly) ARTrackingStateReason trackingStateReason NS_REFINED_FOR_SWIFT;
/**
相机曲率(笔者有点费解,反复揣摩应该是与焦距相关参数)
3x3矩阵
fx 0 px
0 fy py
0 0 1
*/
@property (nonatomic, readonly) matrix_float3x3 intrinsics;
/**
摄像头分辨率
*/
@property (nonatomic, readonly) CGSize imageResolution;
/**
投影矩阵
*/
@property (nonatomic, readonly) matrix_float4x4 projectionMatrix;
/**
创建相机投影矩阵
*/
- (matrix_float4x4)projectionMatrixWithViewportSize:(CGSize)viewportSize orientation:(UIInterfaceOrientation)orientation zNear:(CGFloat)zNear zFar:(CGFloat)zFar;
@end
//相机追踪状态枚举
typedef NS_ENUM(NSInteger, ARTrackingState) {
/** 不被允许 */
ARTrackingStateNotAvailable,
/** 最小 */
ARTrackingStateLimited,
/** 正常. */
ARTrackingStateNormal,
} NS_REFINED_FOR_SWIFT;
/**
追踪运动类型
*/
API_AVAILABLE(ios(11.0)) API_UNAVAILABLE(macos, watchos, tvos)
typedef NS_ENUM(NSInteger, ARTrackingStateReason) {
/** 无. */
ARTrackingStateReasonNone,
/** 运动. */
ARTrackingStateReasonExcessiveMotion,
/** 脸部捕捉. */
ARTrackingStateReasonInsufficientFeatures,
} NS_REFINED_FOR_SWIFT;
5.3、ARError
ARError是一个描述ARKit错误的类,这个错误来源于几个方面,例如设备不支持,或者当相机常驻后台时ARSession会断开等问题
//作用域,一般会表示是哪一个类出现问题
NSString *const ARErrorDomain;
//错误码描述 100:不支持会话追踪配置,主线由于A9芯片以下的机型会报错 101:失活状态 102:传感器故障 200:追踪失败
typedef NS_ERROR_ENUM(ARErrorDomain, ARErrorCode) {
/** Unsupported session configuration. */
ARErrorCodeUnsupportedConfiguration = 100,
/** A sensor required to run the session is not available. */
ARErrorCodeSensorUnavailable = 101,
/** A sensor failed to provide the required input. */
ARErrorCodeSensorFailed = 102,
/** World tracking has encountered a fatal error. */
ARErrorCodeWorldTrackingFailed = 200,
};
5.4、ARFrame
ARFrame主要是追踪相机当前的状态,这个状态不仅仅只是位置,还有图像帧及时间等参数
@interface ARFrame : NSObject
/**
时间戳.
*/
@property (nonatomic, readonly) NSTimeInterval timestamp;
/**
缓冲区图像帧
*/
@property (nonatomic, readonly) CVPixelBufferRef capturedImage;
/**
相机(表示这个ARFrame是哪一个相机的,iPhone7plus有两个摄像机)
*/
@property (nonatomic, copy, readonly) ARCamera *camera;
/**
返回当前相机捕捉到的锚点数据(当一个3D虚拟模型加入到ARKit中时,锚点值得就是这个模型在AR中的位置)
*/
@property (nonatomic, copy, readonly) NSArray *anchors;
/**
灯光,详情可见本章节ARLightEstimate类介绍(指的是灯光强度 一般是0-2000,系统默认1000)
*/
@property (nonatomic, copy, nullable, readonly) ARLightEstimate *lightEstimate;
/**
特征点(应该是捕捉平地或者人脸的,比较苹果有自带的人脸识别功能)
*/
@property (nonatomic, nullable, readonly) ARPointCloud *rawFeaturePoints;
/**
根据2D坐标点搜索3D模型,这个方法通常用于,当我们在手机屏幕点击某一个点的时候,可以捕捉到这一个点所在的3D模型的位置,至于为什么是一个数组非常好理解。手机屏幕一个是长方形,这是一个二维空间。而相机捕捉到的是一个由这个二维空间射出去的长方体,我们点击屏幕一个点可以理解为在这个长方体的边缘射出一条线,这一条线上可能会有多个3D物体模型
point:2D坐标点(手机屏幕某一点)
ARHitTestResultType:捕捉类型 点还是面
(NSArray *):追踪结果数组 详情见本章节ARHitTestResult类介绍
*/
- (NSArray *)hitTest:(CGPoint)point types:(ARHitTestResultType)types;
/**
相机窗口的的坐标变换(可用于相机横竖屏的旋转适配)
*/
- (CGAffineTransform)displayTransformWithViewportSize:(CGSize)viewportSize orientation:(UIInterfaceOrientation)orientation;
@end
5.5、ARHitTestResult
ARHitTestResult:点击回调结果,这个类主要用于虚拟增强现实技术(AR技术)中现实世界与3D场景中虚拟物体的交互。 比如我们在相机中移动。拖拽3D虚拟物体,都可以通过这个类来获取ARKit所捕捉的结果。
//捕捉类型枚举
typedef NS_OPTIONS(NSUInteger, ARHitTestResultType) {
/** 点. */
ARHitTestResultTypeFeaturePoint = (1 << 0),
/** 水平面 y为0. */
ARHitTestResultTypeEstimatedHorizontalPlane = (1 << 1),
/** 已结存在的平面. */
ARHitTestResultTypeExistingPlane = (1 << 3),
/** 已结存在的锚点和平面. */
ARHitTestResultTypeExistingPlaneUsingExtent = (1 << 4),
} NS_SWIFT_NAME(ARHitTestResult.ResultType);
/**
捕捉类型
*/
@property (nonatomic, readonly) ARHitTestResultType type;
/**
3D虚拟物体与相机的距离(单位:米)
*/
@property (nonatomic, readonly) CGFloat distance;
/**
本地坐标矩阵(世界坐标指的是相机为场景原点的坐标,而每一个3D物体自身有一个场景,本地坐标就是相对于这个场景的坐标)类似于frame和bounds的区别
*/
@property (nonatomic, readonly) matrix_float4x4 localTransform;
/**
世界坐标矩阵
*/
@property (nonatomic, readonly) matrix_float4x4 worldTransform;
/**
锚点(3D虚拟物体,在虚拟世界有一个位置,这个位置参数是SceneKit中的SCNVector3:三维矢量),而锚点anchor是这个物体在AR现实场景中的位置,是一个4x4的矩阵
*/
@property (nonatomic, strong, nullable, readonly) ARAnchor *anchor;
@end
5.6、ARLightEstimate
ARLightEstimate是一个灯光效果,它可以让你的AR场景看起来更加的好
@interface ARLightEstimate : NSObject
/**
灯光强度 范围0-2000 默认1000
*/
@property (nonatomic, readonly) CGFloat ambientIntensity;
@end
5.7、ARPlaneAnchor
ARPlaneAnchor是ARAnchor的子类,笔者称之为平地锚点。ARKit能够自动识别平地,并且会默认添加一个锚点到场景中,当然要想看到真实世界中的平地效果,需要我们自己使用SCNNode来渲染这个锚点,锚点只是一个位置。
/**
平地类型,目前只有一个,就是水平面
*/
@property (nonatomic, readonly) ARPlaneAnchorAlignment alignment;
/**
3轴矢量结构体,表示平地的中心点 x/y/z
*/
@property (nonatomic, readonly) vector_float3 center;
/**
3轴矢量结构体,表示平地的大小(宽度和高度) x/y/z
*/
@property (nonatomic, readonly) vector_float3 extent;
@end
5.8、ARPointCloud
ARPointCloud:点状渲染云,主要用于渲染场景
@interface ARPointCloud : NSObject
/**
点的数量
*/
@property (nonatomic, readonly) NSUInteger count;
/**
每一个点的位置的集合(结构体带*表示的是结构体数组)
*/
@property (nonatomic, readonly) const vector_float3 *points;
@end
5.9、 ARSCNView
AR视图, ARKit支持3D的AR场景和2D的AR场景,ARSCNView是3D的AR场景视图,该类是整个ARKit框架中唯一两个有代理的类其中之一。该类非常重要,且API较多.
@interface ARSCNView : SCNView
/**
代理
*/
@property (nonatomic, weak, nullable) id delegate;
/**
AR会话
*/
@property (nonatomic, strong) ARSession *session;
/**
场景
*/
@property(nonatomic, strong) SCNScene *scene;
/**
是否自动适应灯光
*/
@property(nonatomic) BOOL automaticallyUpdatesLighting;
/**
返回对应节点的锚点,节点是一个3D虚拟物体,它的坐标是虚拟场景中的坐标,而锚点ARAnchor是ARKit中现实世界的坐标。
*/
- (nullable ARAnchor *)anchorForNode:(SCNNode *)node;
/**
返回对应锚点的物体
*/
- (nullable SCNNode *)nodeForAnchor:(ARAnchor *)anchor;
/**
根据2D坐标点搜索3D模型,这个方法通常用于,当我们在手机屏幕点击某一个点的时候,可以捕捉到这一个点所在的3D模型的位置,至于为什么是一个数组非常好理解。手机屏幕一个是长方形,这是一个二维空间。而相机捕捉到的是一个由这个二维空间射出去的长方体,我们点击屏幕一个点可以理解为在这个长方体的边缘射出一条线,这一条线上可能会有多个3D物体模型
point:2D坐标点(手机屏幕某一点)
ARHitTestResultType:捕捉类型 点还是面
(NSArray *):追踪结果数组 详情见本章节ARHitTestResult类介绍
数组的结果排序是由近到远
*/
- (NSArray *)hitTest:(CGPoint)point types:(ARHitTestResultType)types;
@end
//代理
#pragma mark - ARSCNViewDelegate
//代理的内部实现了SCNSceneRendererDelegate:scenekit代理 和ARSessionObserver:ARSession监听(KVO机制)
@protocol ARSCNViewDelegate
@optional
/**
自定义节点的锚点
*/
- (nullable SCNNode *)renderer:(id )renderer nodeForAnchor:(ARAnchor *)anchor;
/**
当添加节点是会调用,我们可以通过这个代理方法得知我们添加一个虚拟物体到AR场景下的锚点(AR现实世界中的坐标)
*/
- (void)renderer:(id )renderer didAddNode:(SCNNode *)node forAnchor:(ARAnchor *)anchor;
/**
将要刷新节点
*/
- (void)renderer:(id )renderer willUpdateNode:(SCNNode *)node forAnchor:(ARAnchor *)anchor;
/**
已经刷新节点
*/
- (void)renderer:(id )renderer didUpdateNode:(SCNNode *)node forAnchor:(ARAnchor *)anchor;
/**
移除节点
*/
- (void)renderer:(id )renderer didRemoveNode:(SCNNode *)node forAnchor:(ARAnchor *)anchor;
@end
5.10、 ARSession
ARSession是一个连接底层与AR视图之间的桥梁,其实ARSCNView内部所有的代理方法都是由ARSession来提供的。
ARSession获取相机位置数据主要有两种方式
- push。 实时不断的获取相机位置,由ARSession主动告知用户。通过实现ARSession的代理- (void)session:(ARSession *)session didUpdateFrame:(ARFrame *)frame来获取
- pull。 用户想要时,主动去获取。ARSession的属性currentFrame来获取
@interface ARSession : NSObject
/**
代理
*/
@property (nonatomic, weak) id delegate;
/**
指定代理执行的线程(主线程不会有延迟,子线程会有延迟),不指定的话默认主线程
*/
@property (nonatomic, strong, nullable) dispatch_queue_t delegateQueue;
/**
相机当前的位置(是由会话追踪配置计算出来的)
*/
@property (nonatomic, copy, nullable, readonly) ARFrame *currentFrame;
/**
会话追踪配置
*/
@property (nonatomic, copy, nullable, readonly) ARSessionConfiguration *configuration;
/**
运行会话(这行代码就是开启AR的关键所在)
*/
- (void)runWithConfiguration:(ARSessionConfiguration *)configuration NS_SWIFT_UNAVAILABLE("Use run(_:options:)");
/**
运行会话,只是多了一个参数ARSessionRunOptions:作用就是会话断开重连时的行为。ARSessionRunOptionResetTracking:表示充值追踪 ARSessionRunOptionRemoveExistingAnchors:移除现有锚点
*/
- (void)runWithConfiguration:(ARSessionConfiguration *)configuration options:(ARSessionRunOptions)options NS_SWIFT_NAME(run(_:options:));
/**
暂停会话
*/
- (void)pause;
/**
添加锚点
*/
- (void)addAnchor:(ARAnchor *)anchor NS_SWIFT_NAME(add(anchor:));
/**
移除锚点
*/
- (void)removeAnchor:(ARAnchor *)anchor NS_SWIFT_NAME(remove(anchor:));
@end
//session代理分类两部分,一个是观察者(KVO) 一个是委托者(代理)
#pragma mark - ARSessionObserver
//session KVO观察者
@protocol ARSessionObserver
@optional
/**
session失败
*/
- (void)session:(ARSession *)session didFailWithError:(NSError *)error;
/**
相机改变追踪状态
*/
- (void)session:(ARSession *)session cameraDidChangeTrackingState:(ARCamera *)camera;
/**
session意外断开(如果开启ARSession之后,APP退到后台就有可能导致会话断开)
*/
- (void)sessionWasInterrupted:(ARSession *)session;
/**
session会话断开恢复(短时间退到后台再进入APP会自动恢复)
*/
- (void)sessionInterruptionEnded:(ARSession *)session;
@end
#pragma mark - ARSessionDelegate
@protocol ARSessionDelegate
@optional
/**
更新相机位置
*/
- (void)session:(ARSession *)session didUpdateFrame:(ARFrame *)frame;
/**
添加锚点
*/
- (void)session:(ARSession *)session didAddAnchors:(NSArray*)anchors;
/**
刷新锚点
*/
- (void)session:(ARSession *)session didUpdateAnchors:(NSArray*)anchors;
/**
移除锚点
*/
- (void)session:(ARSession *)session didRemoveAnchors:(NSArray*)anchors;
@end
5.11、ARSessionConfiguration
ARSessionConfiguration会话追踪配置,主要就是追踪相机的配置。注意:该类还有一个子类:ARWorldTrackingSessionConfiguration,它们在同一个API文件中
//会话追踪配置类
@interface ARSessionConfiguration : NSObject
/**
当前设备是否支持,一般A9芯片以下设备不支持
*/
@property(class, nonatomic, readonly) BOOL isSupported;
/**
会话的对其方式,这里的对其指的是3D世界的坐标。枚举值见下方
*/
@property (nonatomic, readwrite) ARWorldAlignment worldAlignment;
/**
是否需要自适应灯光效果,默认是YES
*/
@property (nonatomic, readwrite, getter=isLightEstimationEnabled) BOOL lightEstimationEnabled;
@end
//世界会话追踪配置,苹果建议我们使用这个类,这个子类只有一个属性,也就是可以帮助我们追踪相机捕捉到的平地
@interface ARWorldTrackingSessionConfiguration : ARSessionConfiguration
/**
侦查类型。枚举值见下方(默认侦查平地)
*/
@property (nonatomic, readwrite) ARPlaneDetection planeDetection;
@end
追踪对其方式,这个决定了参考坐标系(参照物)
typedef NS_ENUM(NSInteger, ARWorldAlignment) {
/* 相机位置 vector (0, -1, 0) /
ARWorldAlignmentGravity,
/** 相机位置及方向. vector (0, -1, 0) heading :(0, 0, -1) */
ARWorldAlignmentGravityAndHeading,
/** 相机方向. */
ARWorldAlignmentCamera
}
/平面检测类型*/
typedef NS_OPTIONS(NSUInteger, ARPlaneDetection) {
/ 不检测. */
ARPlaneDetectionNone = 0,
/** 平地检测 */
ARPlaneDetectionHorizontal = (1 << 0),
}
参考资料:
1,https://developer.apple.com/arkit/
- https://developer.apple.com/documentation/arkit
3,https://forums.developer.apple.com/community/graphics-and-games/arkit