这一章要学习的是怎么控制一个差分轮机器人
1 单位和坐标系统
ROS使用的坐标系统是右手坐标系。
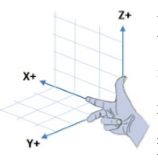
旋转依据的是右手法则。
对于ROS的一动基座来说,X指向前方,Y指向左边。按照右手法则方向的旋转是正转。
ROS的长度单位是米。室内机器人,通常会把速度限制在0.2m/s以内。
2 运动控制
其实就是不同的抽象层,比如直接控制,路径规划,SLAM(Simultaneous Localization and Mapping)。这三个是一级一级更高抽象。
2.1 base controller
base controller node 把里程信息推送到 /odom主题上,从主题/cmd_vel获取移动指令。与此同时,controller node(也不全是)将/odom框架转换为base框架,推送到/base_link或者/base_footprint。
我们说不全是是因为有的机器人会使用robot_pose_ekf package来联合轮子量程数据和陀螺仪数据,获得一个更加精确的位置和方向估测。所以这时候就是robot_pose_ekf node 负责发布/odom到/base_footprint的转换。
2.2 Frame-Base Motion
ROS提供了一个package叫move_base,允许我们根据一个坐标系或参照物给机器人指定一个目标和方向。然后move_base就会试图移动机器人前往那个目标,并且避开障碍物。
move_base package是一个有强大路径规划能力的包,并且能够联合里程信息和全局和本地地图来前往目标。
它甚至还能自动控制速度和角速度。
2.3 SLAM (即时定位与地图构建)
使用gmapping和amcl package
这是更高等级的抽象。ROS允许机器人通过使用SLAM gmapping package创建一个环境的地图。地图创建最好使用激光雷达,不过使用深度相机或者Kinect也是可以模拟激光雷达的。
当环境地图创建了以后,ROS提供amcl package自动使用实时扫描的信息和量程信息确定机器人的位置。这能够实现,点击地图上的一点,机器人自动跟随并且自动避障。
2.4 语音指令
语音指令被分成很多package,有smach,behavior_trees,executive,和knowrob。
2.5 总结
总的来看,运动控制流程如下:
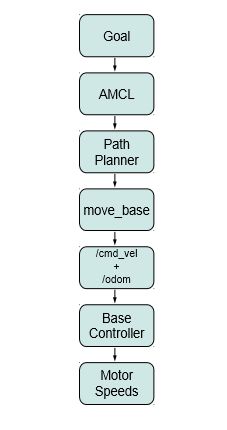
接下来我们就要学习,如何利用这些东西去做运动控制。在这之前,我们需要了解一些基本的东西。
3 Twisting 和 Turning
ROS使用Twist消息类型推送移动指令控制运动基座。我们将message推送到一个任意名字的topic,通常是/cmd_vel(也就是command velocities的缩写)。base_controller node订阅这个topic并且将Twist消息转换为电机信号使轮子转动。
可以查看一下Twist消息类型:
rosmsg show geometry_msgs/Twist
可以得到以下信息:
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
linear就是指示米每秒,angular就是指示rad/s,1rad大概57度。
3.1 Twist message示例
如果我们想要让机器人以0.1m/s的速度移动。这样的话消息的样子应该是linear:x=0.1,y=0,z=0,然后angular的值应该是:x=0,y=0,z=0.
如果想要执行这个命令,参数部分应该是如下的形式:
{linear: {x: 0.1, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0}}
如果我们要这么控制机器人运行,手打的要累死了,实际上我们也很少这样去控制机器人。我们会使用别的node来控制。
3.2 使用RViz监视机器人
首先启动机器人:
roslaunch rbx1_bringup fake_turtlebot.launch
再打开一个命令行,启动rviz:
rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz
再打开一个命令窗口,向Twist推送消息使他运动:
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.1, y: 0, z: 0}, angular: {x: 0, y: 0, z: -0.5}}'
使用-r是让推送自动以后面10Hz的频率推送到Twist,停止推送机器人就会停止,这实际上是一个安全设置,有些机器人不需要这样。
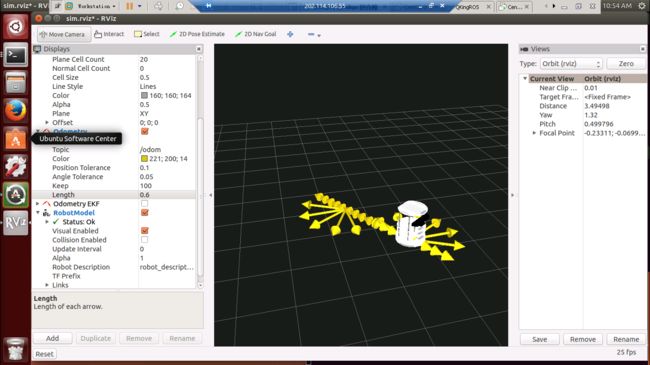
然后我们会看到下面的效果:
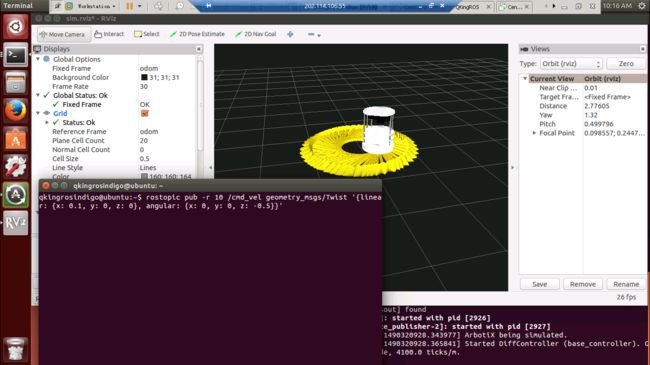
可以点击reset按键清除掉箭头。
让机器人停止运动,要先Ctrl+C停止刚才的指令输出,然后发布新的指令:
rostopic pub -1 /cmd_vel geometry_msgs/Twist '{}'
现在我们尝试一下第二个例子。下面的命令,会先让机器人向前移动3s(-1就是只发布一次的意思,我也不知道为什么是3秒),然后转圈:
$ rostopic pub -1 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0}}'; rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
4 校准量程
这一节是给真正的机器人的,所以我们先跳过。
5 使用node推送消息到Twist
我们要实现机器人按照一定路径去运行
5.1 运行out-and-back仿真
停止刚才的指令,启动机器人:
$ roslaunch rbx1_bringup fake_turtlebot.launch
如果已经关了rviz,可以重新启动:
$ rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz
运行node:
rosrun rbx1_nav timed_out_and_back.py
运行效果是下面这样:
5.2 源码分析
源码
#!/usr/bin/env python
""" timed_out_and_back.py - Version 1.2 2014-12-14
A basic demo of the using odometry data to move the robot along
and out-and-back trajectory.
Created for the Pi Robot Project: http://www.pirobot.org
Copyright (c) 2012 Patrick Goebel. All rights reserved.
This program is free software; you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation; either version 2 of the License, or
(at your option) any later version.5
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details at:
http://www.gnu.org/licenses/gpl.html
"""
import rospy
from geometry_msgs.msg import Twist
from math import pi
class OutAndBack():
def __init__(self):
# Give the node a name
rospy.init_node('out_and_back', anonymous=False)
# Set rospy to execute a shutdown function when exiting
rospy.on_shutdown(self.shutdown)
# Publisher to control the robot's speed
self.cmd_vel = rospy.Publisher('/cmd_vel', Twist, queue_size=1)
# How fast will we update the robot's movement?
rate = 50
# Set the equivalent ROS rate variable
r = rospy.Rate(rate)
# Set the forward linear speed to 0.2 meters per second
linear_speed = 0.2
# Set the travel distance to 1.0 meters
goal_distance = 1.0
# How long should it take us to get there?
linear_duration = goal_distance / linear_speed
# Set the rotation speed to 1.0 radians per second
angular_speed = 1.0
# Set the rotation angle to Pi radians (180 degrees)
goal_angle = pi
# How long should it take to rotate?
angular_duration = goal_angle / angular_speed
# Loop through the two legs of the trip
for i in range(2):
# Initialize the movement command
move_cmd = Twist()
# Set the forward speed
move_cmd.linear.x = linear_speed
# Move forward for a time to go the desired distance
ticks = int(linear_duration * rate)
for t in range(ticks):
self.cmd_vel.publish(move_cmd)
r.sleep()
# Stop the robot before the rotation
move_cmd = Twist()
self.cmd_vel.publish(move_cmd)
rospy.sleep(1)
# Now rotate left roughly 180 degrees
# Set the angular speed
move_cmd.angular.z = angular_speed
# Rotate for a time to go 180 degrees
ticks = int(goal_angle * rate)
for t in range(ticks):
self.cmd_vel.publish(move_cmd)
r.sleep()
# Stop the robot before the next leg
move_cmd = Twist()
self.cmd_vel.publish(move_cmd)
rospy.sleep(1)
# Stop the robot
self.cmd_vel.publish(Twist())
def shutdown(self):
# Always stop the robot when shutting down the node.
rospy.loginfo("Stopping the robot...")
self.cmd_vel.publish(Twist())
rospy.sleep(1)
if __name__ == '__main__':
try:
OutAndBack()
except:
rospy.loginfo("Out-and-Back node terminated.")
分析
#!/usr/bin/env python
确保程序执行为python脚本。
import rospy
将ROS的Python库包含进来。
from geometry_msgs.msg import Twist
from math import pi
这里包含了我们要用到的两个东西,需要注意的是,要把这个message的依赖计入到package.xml文件里:
这样我们才能把Twist包含进来。
class OutAndBack():
def __init__(self):
建立Python类,还有初始化函数。
# Give the node a name
rospy.init_node('out_and_back', anonymous=False)
# Set rospy to execute a shutdown function when exiting
rospy.on_shutdown(self.shutdown)
每个ROS node都需要这样一个初始化函数,并且我们还定义了一个回调函数,当node需要被清除的时候调用,做善后工作,比如让机器人停下来。后面会讲到。
# Publisher to control the robot's speed
self.cmd_vel = rospy.Publisher('/cmd_vel', Twist, queue_size=1)
# How fast will we update the robot's movement?
rate = 50
# Set the equivalent ROS rate variable
r = rospy.Rate(rate)
这里定义了要发送主题,消息和队列大小。以及发送频率。
这个队列大小可以去官网查看详细内容,如果我们忘了设置它,或者设置成了0,就会导致发布变成同步的,如果这个时候有很多个订阅者,那很可能某一个订阅者因为别的原因被挂起,导致整个系统都暂停在这里。设置一个大小,就能使这种发布异步进行,防止系统卡死。
# Set the forward linear speed to 0.2 meters per second
linear_speed = 0.2
# Set the travel distance to 1.0 meters
goal_distance = 1.0
# How long should it take us to get there?
linear_duration = goal_distance / linear_speed
设定了速度,路程,并估计了一下时间。
# Set the rotation speed to 1.0 radians per second
angular_speed = 1.0
# Set the rotation angle to Pi radians (180 degrees)
goal_angle = pi
# How long should it take to rotate?
angular_duration = goal_angle / angular_speed
类似上面。
# Loop through the two legs of the trip
for i in range(2):
# Initialize the movement command
move_cmd = Twist()
# Set the forward speed
move_cmd.linear.x = linear_speed
# Move forward for a time to go the desired distance
ticks = int(linear_duration * rate)
for t in range(ticks):
self.cmd_vel.publish(move_cmd)
r.sleep()
这个就是真正控制运动的部分,最外面的循环,是给两个轮子的。里面是持续的给指令让它保持运动。
# Stop the robot before the rotation
move_cmd = Twist()
self.cmd_vel.publish(move_cmd)
rospy.sleep(1)
在旋转之前,又发了一次空指令,让机器人停止前进。
# Set the angular speed
move_cmd.angular.z = angular_speed
# Rotate for a time to go 180 degrees
ticks = int(goal_angle * rate)
for t in range(ticks):
self.cmd_vel.publish(move_cmd)
r.sleep()
这里就是对转圈的处理。
这两个里面,都要保持持续的命令推送,推送的次数就是(1/rate)。
# Stop the robot before the next leg
move_cmd = Twist()
self.cmd_vel.publish(move_cmd)
rospy.sleep(1)
切换到另一条腿前停止。
# Stop the robot
self.cmd_vel.publish(Twist())
然后停止整个机器人。
def shutdown(self):
# Always stop the robot when shutting down the node.
rospy.loginfo("Stopping the robot...")
self.cmd_vel.publish(Twist())
rospy.sleep(1)
这个就是当机器人被关闭的时候,或者说意外关闭的时候执行的程序。我们在里面设置了机器人必须停止运动。
if __name__ == '__main__':
try:
OutAndBack()
except:
rospy.loginfo("Out-and-Back node terminated.")
这就是主程序。
6 量程测量
ROS提供了message nav_msgs/Odometry保存了有关路程的数据。
关于它简短的描述是:
Header header
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/TwistWithCovariance twist
详细的信息使用指令rosmsg show nav_msgs/Odometry查看:
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
float64[36] covariance
geometry_msgs/TwistWithCovariance twist
geometry_msgs/Twist twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
float64[36] covariance
我们看到 PoseWithCovariance 保存的是机器人现在的位置和姿态,TwistWithCovariance 保存的是其运行速度和旋转速度。
pose和twist都可以使用covariance 来修正偏差。