前言
LuaTask是什么?这儿引用稀饭放姜大神给LuaTask写的readme
OpenLuat 基于合宙(AirM2M) 原有Luat平台重构的一个分支,主要是重构了平台代码,增加了基于协程的多线程任务支持,使用户可以快速进行产品的开发,而不用考虑消息的繁琐回调。避免复杂的回调导致类似“goto”那种混淆的逻辑,同时保留了原有的消息回调机制。
当应用场景需要消息回调的时候,依旧可以使用消息的发布和订阅执行模式进行编程。
OpenLuat -- Task 编程
- OpenLuat 支持多任务编程,利用底层消息机制和Lua原生协程完美融合实现了多线程支持和多任务编程,并且保留了消息机制特有的高实时性和低功耗特性。
- OpenLuat 提供了基于线程阻塞的函数--
wait(ms),用来帮助用户解决任务需要延时等待的情况,不同于底层rtos.sleep,调用wait(ms)的任务主动释放资源并挂起,直到延时值满足被主调度器恢复运行。 - OpenLuat 提供了消息机制的条件等待超时处理函数--
result, data = waitUntil(id, ms),用来帮助用户解决一些需要等待条件满足立刻恢复任务的情况,并提供了超时调用回调函数的处理方式。返回值用作语句执行结束后做进一步处理用,以满足不同的场景需求。
LuaTask地址:https://github.com/openLuat/Luat
预备知识
如果对Lua的coroutine 有一定了解,可以跳过这部分。
Lua 支持 coroutine ,这个东西也被称为协同式多线程 (collaborative multithreading)。 Lua 为每个 coroutine 提供一个独立的运行线路。举个通俗易懂的例子:去饭店吃饭,假设饭店只有一个厨师,这时候来了三个客人,分别点了一号菜,二号菜,三号菜。如果按照一二三这样的顺序做菜的话,效率很低。现在引入一种新模式,每个菜花2分钟时间去做。这样的顺序就变为了花两分钟做第一道菜,两分钟到了,做第二道菜,二分钟到了,然后第三道菜。这样的好处是每个客人的菜都有一段时间正在制作过程中,不会出现其他菜必须等到一道菜结束后才可以去做。客人就是上帝,二号客人比较饿,所以可以要求厨师花5分钟制作二号菜。这样的好处之一是可以对每道菜灵活分配时间。不太恰当的比喻,厨师就是CPU,客人就是任务。
先看一个简单的程序:
co = coroutine.create( --1
function(i)
print(coroutine.status(co))
print(i);
end
)
print(coroutine.status(co)) --2
coroutine.resume(co, 1) --3
print(coroutine.status(co)) --4
--输出结果
--suspended
--running
--1
--dead
- 创建一个 coroutine 需要调用一次
coroutine.create。它只接收单个参数,这个参数是 coroutine 的主函数。create函数仅仅创建一个新的 coroutine 然后返回它的控制器(一个类型为 thread 的对象);它并不会启动 coroutine 的运行。 - 输出当前线程状态,为suspend(挂起,并未执行)
- 唤醒线程,传入参数,此时执行线程,线程状态为running,输出1
- 线程结束,正常退出,
coroutine.resume(co, 1)返回true。输出线程状态,为dead。注意:dead之后不能再resume(死了的人怎么能唤醒呢?/滑稽)
这儿提到了三种状态,画了一个图来描述它们之间的关系
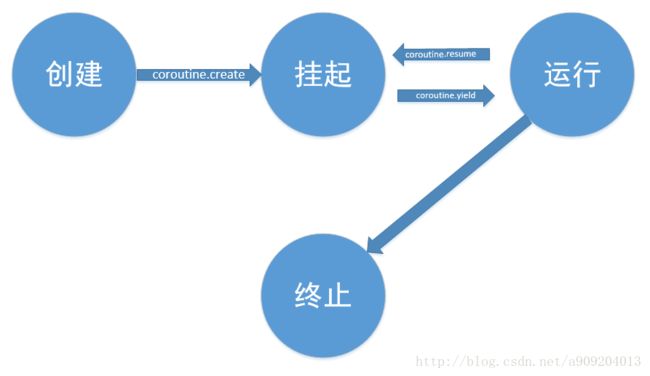
| 方法 | 释义 |
|---|---|
| coroutine.create() | 创建coroutine,返回thread, 参数是一个函数建之后线程属于挂起状态,并没有执行! |
| coroutine.resume() | 执行线程,和create配合使用,此时线程为running状态。 |
| coroutine.yield() | 挂起coroutine,将coroutine设置为挂起状态。下次执行resume,程序将回到挂起的位置继续执行而不是从头再执行。挂起成功返回true |
| coroutine.status() | 查看coroutine的状态注:coroutine的状态有三种:dead,suspend,running。 |
| coroutine.running() | 返回正在跑的coroutine,一个coroutine就是一个线程,当使用running的时候,就是返回一个corouting的线程号 |
coroutine 可以通过两种方式来终止运行:一种是正常退出,指它的主函数返回(最后一条指令被运行后,无论有没有显式的返回指令); 另一种是非正常退出,它发生在未保护的错误发生的时候。第一种情况中, coroutine.resume返回 true,接下来会跟着 coroutine 主函数的一系列返回值。第二种发生错误的情况下, coroutine.resume返回 false ,紧接着是一条错误信息。
接下来我们分析一个更详细的实例(引用于Lua手册):
function foo (a) --1
print("foo 函数输出", a)
return coroutine.yield(2 * a) -- 返回 2*a 的值
end
co = coroutine.create(function (a , b) --2
print("第一次协同程序执行输出", a, b) -- co-body 1 10
local r = foo(a + 1)
print("第二次协同程序执行输出", r)
local r, s = coroutine.yield(a + b, a - b) -- a,b的值为第一次调用协同程序时传入
print("第三次协同程序执行输出", r, s)
return b, "结束协同程序" -- b的值为第二次调用协同程序时传入
end)
print("main", coroutine.resume(co, 1, 10)) -- true, 4 --3
print("--分割线----")
print("main", coroutine.resume(co, "r")) -- true 11 -9 --4
print("---分割线---")
print("main", coroutine.resume(co, "x", "y")) -- true 10 end --5
print("---分割线---")
print("main", coroutine.resume(co, "x", "y")) -- cannot resume dead coroutine --5
print("---分割线---")
--输出结果
--[[
第一次协同程序执行输出 1 10
foo 函数输出 2
main true 4
--分割线----
第二次协同程序执行输出 r
main true 11 -9
---分割线---
第三次协同程序执行输出 x y
main true 10 结束协同程序
---分割线---
main false cannot resume dead coroutine
---分割线---
]]
显然,这个例子比上面例子复杂许多,不过只要仔细分析,理解起来也不会困难
- 调用resume唤醒线程,并传参1,10。输出“第一次协同程序执行输出 1 10”。接下来执行foo函数,输出“foo 函数输出 2”。在foo函数中遇到了yeild,挂起线程,此时程序停留在这儿,下次唤醒线程时从该处继续执行。返回yeild的参数。输出“main true 4”。
- 第二次调用resume唤醒线程,传入参数“r”,注意:此时传入的参数“r”,赋值给coroutine.yield,所以相当于local r = "r",输出“第二次协同程序执行输出r”。再次遇到yeild,挂起线程,此时程序停留在这儿,下次唤醒线程时从该处继续执行。返回yeild的参数。输出“main true 11 -9”。
- 第三次调用resume唤醒线程,传入参数“x”,“y”,赋值给coroutine.yield,相当于local r,s = "r","s",输出“第三次协同程序执行输出xy”。到这儿整个线程就结束了,输出“main true 10 结束协同程序”
- 第二次调用resume唤醒线程,传入参数“r”,注意:此时传入的参数“r”,赋值给coroutine.yield,所以相当于local r = "r",输出“第二次协同程序执行输出r”。再次遇到yeild,挂起线程,此时程序停留在这儿,下次唤醒线程时从该处继续执行。返回yeild的参数。输出“main true 11 -9”。
- 第四次调用resume唤醒线程,此时线程已经为dead了,无法唤醒。
resume和yield的配合强大之处在于,resume处于主程中,它将外部状态(数据)传入到协同程序内部;而yield则将内部的状态(数据)返回到主程中。
再举个小例子说明resume和yield关系
co = coroutine.create (function (a,b)
local a,b = coroutine.yield(a+b)
print("co", a,b)
end)
print(coroutine.resume(co,4,5))
coroutine.resume(co, 7, 8)
--输出
--[[
true 9
co 7 8
]]
- 调用resume唤醒线程,并且传入4,5。遇到yeild,挂起程序,返回a+b。所以输出“true 9”。
- 第二次调用resume唤醒线程,并且传入7,8。此时回到上次挂起的位置,并将赋值给a,b。相当于local a,b = 7,8
LuaTask
为了更好的理解LuaTask,花了大量时间讲解Lua的协同式多线程 ,接下来进入正题
先写一个测试程序
module(..., package.seeall)
sys.taskInit(function()
cnt = 0
while true do
cnt = cnt + 1
print("task_A_cnt: ", cnt)
sys.wait(1000)
end
end)
sys.taskInit(function()
cnt = 0
while true do
cnt = cnt + 1
print("task_B_cnt: ", cnt)
sys.wait(2000)
end
end)
输出结果,只摘抄了一小部分
task_B_cnt: 132
task_A_cnt: 133
task_A_cnt: 134
task_B_cnt: 135
task_A_cnt: 136
task_A_cnt: 137
task_B_cnt: 138
task_A_cnt: 139
task_A_cnt: 140
task_B_cnt: 141
task_A_cnt: 142
该测试程序总共创建了2个任务,第一个任务每次加1,挂起1000ms,第二个任务每次加1,挂起2000ms,所以最后的输出为:输出两次task_A_cnt, 输出一次task_B_cnt。如果在单片机上习惯写UCOS或者FreeRTOS的开发者看到这样的结构肯定不会陌生。
首先调用sys.taskInit创建任务,任务体的格式为
sys.taskInit(function()
xxxx
while true do
xxxxx
sys.wait(100)
end
end)
还有一种为
local function xxxx(...)
xxxx
end
sys.taskInit(xxxx,...)
和UCOS,FreeRTOS的任务体大致相同,一个while死循环,然后通过延时切换任务。
接下来分析一下sys.taskInit和sys.wait两个重要的函数
先看sys.taskInit的源码
function taskInit(fun, ...)
local co = coroutine.create(fun)
coroutine.resume(co, unpack(arg))
return co
end
sys.taskInit实际是封装了coroutine.create和coroutine.resume。创建一个任务线程,并执行该线程,返回线程号。
再看sys.wait
function wait(ms)
-- 参数检测,参数不能为负值
assert(ms > 0, "The wait time cannot be negative!")
-- 选一个未使用的定时器ID给该任务线程
if taskTimerId >= TASK_TIMER_ID_MAX then taskTimerId = 0 end
taskTimerId = taskTimerId + 1
local timerid = taskTimerId
taskTimerPool[coroutine.running()] = timerid
timerPool[timerid] = coroutine.running()
-- 调用core的rtos定时器
if 1 ~= rtos.timer_start(timerid, ms) then log.debug("rtos.timer_start error") return end
-- 挂起调用的任务线程
local message, data = coroutine.yield()
if message ~= nil then
rtos.timer_stop(timerid)
taskTimerPool[coroutine.running()] = nil
timerPool[timerid] = nil
return message, data
end
end
如何将定时器和任务组织起来的呢?其中最重要的就是taskTimerPool,timerPool这两个表。在此之前我们得每个线程的线程号都是唯一不变的。
程序流程:
- 检测定时时间是否正确
- 判断定时器是否用完,如果没有,则分配一个未使用的定时器ID给该任务线程
- 定时器ID加1
- 以线程号为下标存储定时器ID号到taskTimerPool表中
- 以定时器ID号为下标存储线程号ID到timerPool表中
- 开启定时器
这样描述比较抽象,举个例子会更好理解一点
sys.taskInit(function()
cnt = 0
while true do
print("task: ", 1)
sys.wait(100)
end
end)
以这个简单的例子来解释
sys.taskInit创建并运行该线程,进入sys.wait函数,taskTimerId的初始值为0,所以+1,taskTimerId=1,coroutine.running()会返回正在运行的任务的线程号,也就是当前任务的线程号,比如该例中为0x8218dbc0。注意:线程号是唯一不会改变的。所以taskTimerPool[0x8218dbc0] = 1,timerPool[1] = 0x8218dbc0。这样就将定时器ID和线程号联系起来了。然后开启定时器,挂起该任务,执行下一任务。
问题来了,定时器达到定时时间的时候怎么处理呢?
看下面的代码
function run()
while true do
-- 分发内部消息
dispatch()
-- 阻塞读取外部消息
local msg, param = rtos.receive(rtos.INF_TIMEOUT)
-- 判断是否为定时器消息,并且消息是否注册
if msg == rtos.MSG_TIMER and timerPool[param] then
if param < TASK_TIMER_ID_MAX then
local taskId = timerPool[param]
timerPool[param] = nil
if taskTimerPool[taskId] == param then
taskTimerPool[task Id] = nil
coroutine.resume(taskId)
end
else
local cb = timerPool[param]
timerPool[param] = nil
if para[param] ~= nil then
cb(unpack(para[param]))
else
cb()
end
end
--其他消息(音频消息、充电管理消息、按键消息等)
elseif type(msg) == "number" then
handlers[msg](param)
else
handlers[msg.id](msg)
end
end
end
读取外部消息,当定时器达到定时时间后,会发生一个消息。下面摘抄至wiki(有问题有多去wiki查找)
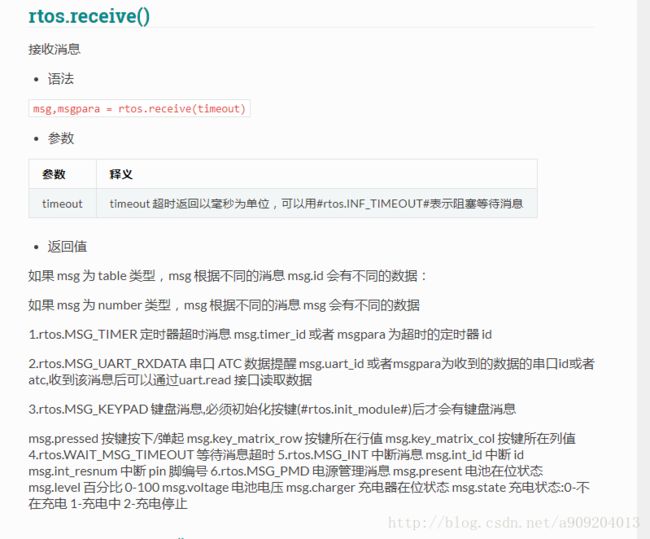
所以,msg为rtos.MSG_TIMER,param为定时器ID号。
- 判断是否为任务开启的定时器,若是,判断定时器ID是否超过最大值
- 根据timerPool获取线程号并清除
- 如果能在taskTimerPool中找到定时器ID和任务号对应,则唤醒该线程
这样,我们就能实现任务与任务之间的调度了。
**