亚像素在提高检测精度上有着很大的作用,在实际的情况下,检测到的角点不会是一个准确的像素点,精确来说是一个浮点数角点,这样可以保证后面的三维重建及相机跟踪才能够更加精确。亚像素检测是基于曲线拟合的方式采用高斯,多项式及椭圆曲面来进行亚像素定位。
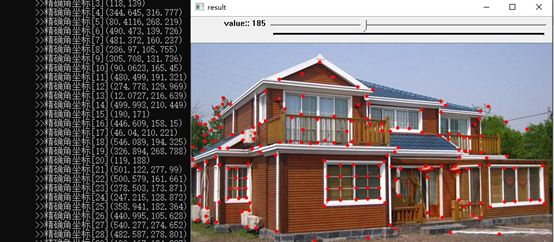
下图是亚像素的检测结果:
亚像素检测函数参数解释:
cornerSubPix(gray,corners,winSize,zeroZone,criteria);
gray,输入的灰度图像;
corners,利用前面角点检测函数提供初始坐标及转化后精确的输出坐标;
winSize,搜索窗口的一般尺寸大小;
zeroZone,死区的一半尺寸,避免自相关矩阵出现可能的奇异值;
criteria,角点迭代终止条件,迭代数目或设定的精度。
#include#include using namespace std; using namespace cv; int init_value=50, max_value=555; Mat src,gray,dst; void subpix(int, void*); int main(int argc, char** argv) { src = imread("H:/cv_code/image/home.jpg"); if (src.empty()) { printf("could not find image"); return -1; } namedWindow("input"); imshow("input",src); cvtColor(src,gray,COLOR_BGR2GRAY); namedWindow("result"); createTrackbar("value:","result",&init_value,max_value, subpix); subpix(0,0); waitKey(0); return 0; } void subpix(int, void*) { if (init_value <= 1) init_value = 1; vector corners; goodFeaturesToTrack(gray,corners,init_value,0.01,10,Mat(),3,false,0.04); dst = src.clone(); int r = 4; for (int i = 0; i < corners.size(); i++) { circle(dst,corners[i],3,Scalar(0,0,255),-1,8,0); } imshow("result",dst); Size winSize = Size(5,5); Size zeroZone = Size(-1, -1);//此值代表没有死区 TermCriteria criteria = TermCriteria(TermCriteria::EPS+ TermCriteria::MAX_ITER,40,0.001); cornerSubPix(gray,corners,winSize,zeroZone,criteria); for (int i = 0; i < corners.size(); i++) { cout << " \t>>精确角坐标[" << i << "](" << corners[i].x<<"," << corners[i].y<<")" << endl; } }