虹软人脸识别3.0 - 图像数据结构介绍(Android)
从虹软开放了2.0版本SDK以来,由于具有免费、离线使用的特点,我们公司在人脸识别门禁应用中使用了虹软SDK,识别效果还不错,因此比较关注虹软SDK的官方动态。近期上线了ArcFace 3.0 SDK版本,确实做了比较大的更新。
- 特征比对支持比对模型选择,有生活照比对模型和人证比对模型
- 识别率、防攻击效果显著提升
- 特征值更新,升级后人脸库需重新注册
- Android平台新增64位的SDK
- 图像处理工具类
- 人脸检测同时支持全角度及单一角度
- 新增了一种图像数据传入方式
在实际开发过程中使用新的图像数据结构具有一定的难度,本文将从以下几点对该图像数据结构及使用方式进行详细介绍
SDK接口变动
ArcSoftImageInfo类解析
SDK相关代码解析
步长的作用
将Camera2回传的Image转换为ArcSoftImageInfo
一、SDK接口变动
在接入3.0版SDK时,发现FaceEngine类中的detectFaces、process、extractFaceFeature等传入图像数据的函数都有重载函数,重载函数的接口均使用ArcSoftImageInfo对象作为入参的图像数据,以人脸检测为例,具体接口如下:
原始接口:
public int detectFaces(byte[] data, int width, int height, int format, List faceInfoList)
新增接口:
public int detectFaces(ArcSoftImageInfo arcSoftImageInfo, List faceInfoList)
可以看到,重载函数传入ArcSoftImageInfo对象作为图像数据进行检测,arcSoftImageInfo替代了原来的data, width, height, format。
二、ArcSoftImageInfo类解析
在我实际使用后发现,ArcSoftImageInfo不只是简单封装一下,它还将一维数组data修改为二维数组planes,还新增了一个与planes对应的步长数组strides。
步长概念介绍:
步长可以理解为一行像素的字节数。
类结构如下:
public class ArcSoftImageInfo {
private int width;
private int height;
private int imageFormat;
private byte[][] planes;
private int[] strides;
...
}
官方文档中对该类的介绍:
- 成员描述
| 类型 | 变量名 | 描述 |
|---|---|---|
| int | width | 图像宽度 |
| int | height | 图像高度 |
| int | imageFormat | 图像格式 |
| byte[][] | planes | 图像通道 |
| int[] | strides | 每个图像通道的步长 |
- 组成方式介绍
// arcSoftImageInfo组成方式举例:
// NV21格式数据,有两个通道,
// Y通道步长一般为图像宽度,若图像经过8字节对齐、16字节对齐等操作,需填入对齐后的图像步长
// VU通道步长一般为图像宽度,若图像经过8字节对齐、16字节对齐等操作,需填入对齐后的图像步长
ArcSoftImageInfo arcSoftImageInfo = new ArcSoftImageInfo(width, height, FaceEngine.CP_PAF_NV21, new byte[][]{planeY, planeVU}, new int[]{yStride, vuStride});
// GRAY,只有一个通道,
// 步长一般为图像宽度,若图像经过8字节对齐、16字节对齐等操作,需填入对齐后的图像步长
arcSoftImageInfo = new ArcSoftImageInfo(width, height, FaceEngine.CP_PAF_GRAY, new byte[][]{gray}, new int[]{grayStride});
// BGR24,只有一个通道,
// 步长一般为图像宽度的三倍,若图像经过8字节对齐、16字节对齐等操作,需填入对齐后的图像步长
arcSoftImageInfo = new ArcSoftImageInfo(width, height, FaceEngine.CP_PAF_BGR24, new byte[][]{bgr24}, new int[]{bgr24Stride});
// DEPTH_U16,只有一个通道,
// 步长一般为图像宽度的两倍,若图像经过8字节对齐、16字节对齐等操作,需填入对齐后的图像步长
arcSoftImageInfo = new ArcSoftImageInfo(width, height, FaceEngine.CP_PAF_DEPTH_U16, new byte[][]{depthU16}, new int[]{depthU16Stride});
可以看到,ArcSoftImageInfo用于存储分离的图像数据,以NV21数据为例,NV21数据有两个通道,那二维数组planes存储的就是两个数组:y数组和vu数组。以下是NV21数据的排列方式:
NV21图像格式属于 YUV颜色空间中的YUV420SP格式,每四个Y分量共用一组U分量和V分量,Y连续存储,U与V交叉存储。
排列方式如下(以8x4的图像为例):
Y Y Y Y Y Y Y Y
Y Y Y Y Y Y Y Y
Y Y Y Y Y Y Y Y
Y Y Y Y Y Y Y Y
V U V U V U V U
V U V U V U V U
以上数据分为两个通道,首先是连续的Y数据,然后是交叉存储的V和U数据。如果我们使用的是Camera API,那基本用不到ArcSoftImageInfo类,因为Camera API回传的NV21数据是连续的,直接使用旧版接口即可;而当我们使用的是其他API时,拿到的数据可能是不连续的,例如使用Camera2 API、MediaCodec拿到的android.media.Image类对象,其图像数据也是分通道的,我们可以根据其通道内容,获取Y通道数据和VU通道数据,组成NV21格式的ArcSoftImageInfo对象用于处理。
三、SDK相关代码解析
我们来看下SDK中判断图像数据是否合法的校验代码:
注:原始代码由于被编译器修改过,阅读体验不佳,以下代码是我修改过的,将常量值替换回常量名,更便于阅读。
-
校验分离的图像信息数据
private static boolean isImageDataValid(byte[] data, int width, int height, int format) { return (format == CP_PAF_NV21 && (height & 1) == 0 && data.length == width * height * 3 / 2)|| (format == CP_PAF_BGR24 && data.length == width * height * 3)|| (format == CP_PAF_GRAY && data.length == width * height) || (format == CP_PAF_DEPTH_U16 && data.length == width * height * 2); }解读:
各个图像数据的要求如下:-
NV21格式图像数据的高度是偶数,数据大小是:宽x高x3/2 -
BGR24格式图像数据的大小是:宽x高x3 -
GRAY格式图像数据的大小是:宽x高 -
DEPTH_U16格式图像数据的大小是:宽x高x2
-
-
校验
ArcSoftImageInfo对象private static boolean isImageDataValid(ArcSoftImageInfo arcSoftImageInfo) { byte[][] planes = arcSoftImageInfo.getPlanes(); int[] strides = arcSoftImageInfo.getStrides(); if (planes != null && strides != null) { if (planes.length != strides.length) { return false; } else { byte[][] var3 = planes; int var4 = planes.length; for(int var5 = 0; var5 < var4; ++var5) { byte[] plane = var3[var5]; if (plane == null || plane.length == 0) { return false; } } switch(arcSoftImageInfo.getImageFormat()) { case CP_PAF_BGR24: case CP_PAF_GRAY: case CP_PAF_DEPTH_U16: return planes.length == 1 && planes[0].length == arcSoftImageInfo.getStrides()[0] * arcSoftImageInfo.getHeight(); case CP_PAF_NV21: return (arcSoftImageInfo.getHeight() & 1) == 0 && planes.length == 2 && planes[0].length == planes[1].length * 2 && planes[0].length == arcSoftImageInfo.getStrides()[0] * arcSoftImageInfo.getHeight() && planes[1].length == arcSoftImageInfo.getStrides()[1] * arcSoftImageInfo.getHeight() / 2; default: return false; } } } else { return false; } }解读:
- 每个通道数据的大小是:
高度x每个通道的步长 -
BGR24、GRAY、DEPTH_U16格式图像数据都只有一个通道,但上述示例组成方式说明中提到它们的步长不同,关系如下:-
BGR24格式图像数据步长一般为3 x width -
GRAY格式图像数据步长一般为width -
DEPTH_U16格式图像数据步长一般为2 x width
-
-
NV21格式图像数据的高度是偶数,有两个通道,且第0个通道的数据大小是第1个通道数据大小的2倍。
- 每个通道数据的大小是:
四、步长的作用
-
具体踩坑举例
如下图,这是在某台手机上使用
Camera2 API时,指定了以1520x760分辨率进行预览时获取的数据。虽然指定的分辨率是1520x760,但是预览数据的实际大小却是1536x760,解析存下的图像数据,发现右边填充的16像素内容均为0,此时若我们以1520x760的分辨率去将这组YUV数据取出并转换为NV21,并在进行人脸检测时传入的宽度是1520,SDK将无法检测到人脸;若我们以1536x760的分辨率去解析,生成的NV21传给SDK,并且传入的宽度是1536时,SDK能够检测到人脸。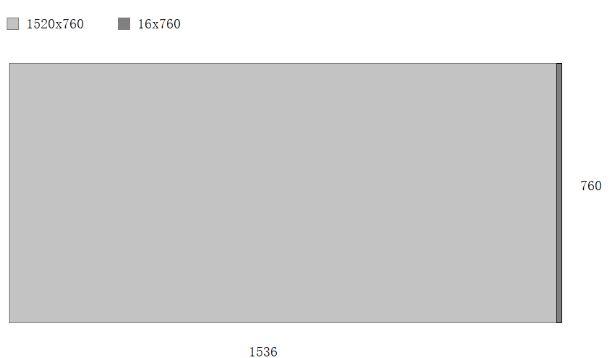 高字节对齐
高字节对齐 步长的重要性
只是差了这几个像素,为什么就导致人脸检测不到了呢?之前说到过,步长可以理解为一行像素的字节数。如果第一行像素的读取有偏差,那后续像素的读取也会受到影响。
以下是对一张大小为1000x554的NV21图像数据,以不同步长进行解析的结果:
| 以正确的步长解析 | 以错误的步长解析 |
|---|---|
|
以1000为步长解析
|
以996为步长解析
|
可以看到,对于一张图像,如果使用了错误的步长去解析,我们可能就无法看到正确的图像内容。
结论:通过引入图像步长能够有效的避免高字节对齐的问题。
五、将Camera2回传的Image转换为ArcSoftImageInfo
-
Camera2 API回传数据处理
对于以上场景,我们可提取android.media.Image对象的Y、U、V通道数据,组成NV21格式的ArcSoftImageInfo对象,传入SDK处理。示例代码如下:- 取出
Camera2 API回传数据的Y、U、V通道数据private class OnImageAvailableListenerImpl implements ImageReader.OnImageAvailableListener{ private byte[] y; private byte[] u; private byte[] v; @Override public void onImageAvailable(ImageReader reader) { Image image = reader.acquireNextImage(); // 实际结果一般是 Y:U:V == 4:2:2 if (camera2Listener != null && image.getFormat() == ImageFormat.YUV_420_888) { Image.Plane[] planes = image.getPlanes(); // 重复使用同一批byte数组,减少gc频率 if (y == null) { y = new byte[planes[0].getBuffer().limit() - planes[0].getBuffer().position()]; u = new byte[planes[1].getBuffer().limit() - planes[1].getBuffer().position()]; v = new byte[planes[2].getBuffer().limit() - planes[2].getBuffer().position()]; } if (image.getPlanes()[0].getBuffer().remaining() == y.length) { planes[0].getBuffer().get(y); planes[1].getBuffer().get(u); planes[2].getBuffer().get(v); camera2Listener.onPreview(y, u, v, mPreviewSize, planes[0].getRowStride()); } } image.close(); } } - 转换为
ArcSoftImageInfo对象
注意: 拿到的YUV数据可能是
YUV422,也可能是YUV420,需要分别实现两者转换为NV21格式的ArcSoftImageInfo对象的函数。@Override public void onPreview(final byte[] y, final byte[] u, final byte[] v, final Size previewSize, final int stride) { if (arcSoftImageInfo == null) { arcSoftImageInfo = new ArcSoftImageInfo(previewSize.getWidth(), previewSize.getHeight(), FaceEngine.CP_PAF_NV21); } // 回传数据是YUV422 if (y.length / u.length == 2) { ImageUtil.yuv422ToNv21ImageInfo(y, u, v, arcSoftImageInfo, stride, previewSize.getHeight()); } // 回传数据是YUV420 else if (y.length / u.length == 4) { ImageUtil.yuv420ToNv21ImageInfo(y, u, v, arcSoftImageInfo, stride, previewSize.getHeight()); } // 此时的arcSoftImageInfo数据即可传给SDK使用 if (faceEngine != null) { ListfaceInfoList = new ArrayList<>(); int code = faceEngine.detectFaces(arcSoftImageInfo, faceInfoList); if (code == ErrorInfo.MOK) { Log.i(TAG, "onPreview: " + code + " " + faceInfoList.size()); } else { Log.i(TAG, "onPreview: no face detected , code is : " + code); } } else { Log.e(TAG, "onPreview: faceEngine is null"); return; } ... } - 取出
以上代码中便是Camera2 API回传的数据转换为ArcSoftImageInfo对象并检测的具体实现。以下是将Y、U、V数据组成ArcSoftImageInfo对象的具体实现。
- 将
Y、U、V数据组成ArcSoftImageInfo对象
对于
Y通道,直接拷贝即可,对于U通道和V通道,需要考虑这组YUV数据的格式是YUV420还是YUV422,再获取其中的U、V数据
/**
* YUV420数据转换为NV21格式的ArcSoftImageInfo
*
* @param y YUV420数据的y分量
* @param u YUV420数据的u分量
* @param v YUV420数据的v分量
* @param arcSoftImageInfo NV21格式的ArcSoftImageInfo
* @param stride y分量的步长,一般情况下,由于YUV数据的对应关系,Y分量步长确定了,U和V也随之确定
* @param height 图像高度
*/
public static void yuv420ToNv21ImageInfo(byte[] y, byte[] u, byte[] v, ArcSoftImageInfo arcSoftImageInfo, int stride, int height) {
if (arcSoftImageInfo.getPlanes() == null) {
arcSoftImageInfo.setPlanes(new byte[][]{new byte[stride * height], new byte[stride * height / 2]});
arcSoftImageInfo.setStrides(new int[]{stride, stride});
}
System.arraycopy(y, 0, arcSoftImageInfo.getPlanes()[0], 0, y.length);
// 注意,vuLength 不能直接通过步长和高度计算,实测发现Camera2 API回传的数据有数据丢失,需要使用真实数据长度
byte[] vu = arcSoftImageInfo.getPlanes()[1];
int vuLength = u.length / 2 + v.length / 2;
int uIndex = 0, vIndex = 0;
for (int i = 0; i < vuLength; i++) {
vu[i] = v[vIndex++];
vu[i + 1] = u[uIndex++];
}
}
/**
* YUV422数据转换为NV21格式的ArcSoftImageInfo
*
* @param y YUV422数据的y分量
* @param u YUV422数据的u分量
* @param v YUV422数据的v分量
* @param arcSoftImageInfo NV21格式的ArcSoftImageInfo
* @param stride y分量的步长,一般情况下,由于YUV数据的对应关系,Y分量步长确定了,U和V也随之确定
* @param height 图像高度
*/
public static void yuv422ToNv21ImageInfo(byte[] y, byte[] u, byte[] v, ArcSoftImageInfo arcSoftImageInfo, int stride, int height) {
if (arcSoftImageInfo.getPlanes() == null) {
arcSoftImageInfo.setPlanes(new byte[][]{new byte[stride * height], new byte[stride * height / 2]});
arcSoftImageInfo.setStrides(new int[]{stride, stride});
}
System.arraycopy(y, 0, arcSoftImageInfo.getPlanes()[0], 0, y.length);
byte[] vu = arcSoftImageInfo.getPlanes()[1];
// 注意,vuLength 不能直接通过步长和高度计算,实测发现Camera2 API回传的数据有数据丢失,需要使用真实数据长度
int vuLength = u.length / 2 + v.length / 2;
int uIndex = 0, vIndex = 0;
for (int i = 0; i < vuLength; i += 2) {
vu[i] = v[vIndex];
vu[i + 1] = u[uIndex];
vIndex += 2;
uIndex += 2;
}
}
六、ArcSoftImageInfo优点总结
- 在获取的图像数据源是分通道的数据时,使用
ArcSoftImageInfo对象传入分离的图像数据可避免数据拼接所需的额外内存消耗。 - 引入了步长的概念,在使用时传入了各个通道的步长,使开发者在使用SDK时对图像数据的了解更清晰。