常见室内定位技术 及源定位方法
室内定位是指在室内环境中实现位置定位,主要采用无线通信、基站定位、惯导定位等多种技术集成形成一套室内位置定位体系,从而实现人员、物体等在室内空间中的位置监控
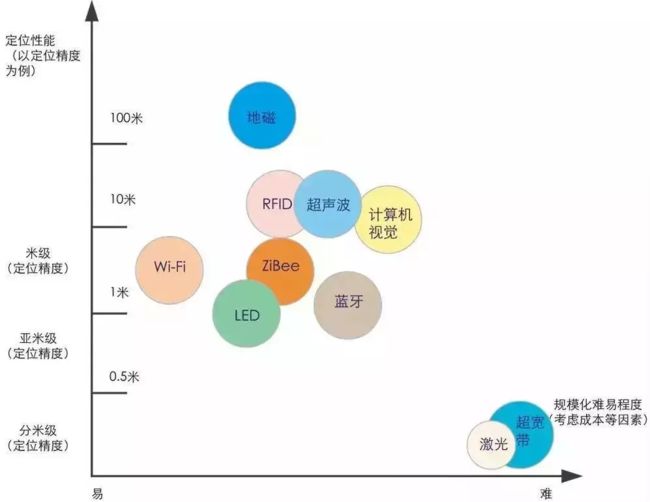
常见的室内定位技术有超声波技术、红外线定位技术、蓝牙定位技术、WiFi定位技术、UWB定位技术、ZigBee定位技术、射频技术、视觉定位等
蓝牙定位:
蓝牙定位原理是基于RSSI信号强度定位,首先在区域内铺设蓝牙信标,由 Beacon 发射信号,蓝牙设备接收信号并反馈,当设备进入范围内时,估算系统中各蓝牙设备之间的距离。
蓝牙定位就是通过两个蓝牙设备之间的距离与接收信号强度指示(接收功率)之间的关系,再通过三角定位原理进行定位
根据定位端的不同,蓝牙定位方式分为网络侧定位和终端侧定位。
网络侧定位系统由终端(手机等带低功耗蓝牙的终端)、蓝牙beacon节点,蓝牙网关,无线局域网及后端数据服务器构成。其具体定位过程是:

1)首先在区域内铺设beacon和蓝牙网关。
2)当终端进入beacon信号覆盖范围,终端就能感应到beacon的广播信号,然后测算出在某beacon下的RSSI值通过蓝牙网关经过wifi网络传送到后端数据服务器,通过服务器内置的定位算法测算出终端的具体位置。
终端侧定位系统由终端设备(如嵌入SDK软件包的手机)和beacon组成。其具体定位原理是:

1)首先在区域内铺设蓝牙信标
2)beacon不断的向周围广播信号和数据包
3)当终端设备进入beacon信号覆盖的范围,测出其在不同基站下的RSSI值,然后再通过手机内置的定位算法测算出具体位置。
终端侧定位一般用于室内定位导航,精准位置营销等用户终端;而网络侧定位主要用于人员跟踪定位,资产定位及客流分析等情境之中。
优缺点:
基于蓝牙的室内定位优点在于设备体积一般比较小,功耗低,建立连接时间短,主要可以应用于小范围的定位。缺点是蓝牙系统稳定性较差,受噪声的干扰比较大。
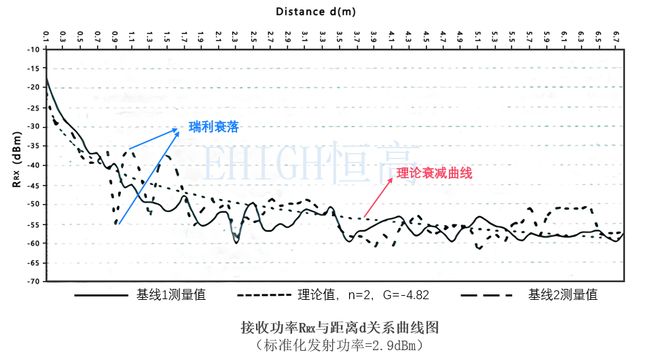
RSSI(Received Signal Strength Indication,信号场强指示)
RSSI是通过计算信号的传播损耗,可以使用理论或者经验模型来将传播损耗转化为距离。
在自由空间中,距发射机d处的天线接收到的信号强度可由下式给出:

其中,PT表示发射功率;PR表示距离d处的接收功率;GT表示发射天线的增益; GR表示接收天线的增益;λ表示信号波长。
三角定位法,也可称为到达角测量法(Arrival Of Angle, AOA)。该方法是在获取待测目标相对两个已知参考点的角度后结合两参考点间的距离信息可以确定唯一的三角形,即可确定待测目标的位置。到达角信息,亦即信号到达的角度,可以通过定向天线获取。

信号噪声干扰和适应 (减小计算误差)
极大似然
泊松分布
基于极大似然估计和简单蒙特卡洛方法的单放射源定位研究
1.建立物理模型和概率模型
2.提出方案,评价方案,筛选方案
3.概率最大的方案为最佳方案,评价最佳方案
WIFI定位:
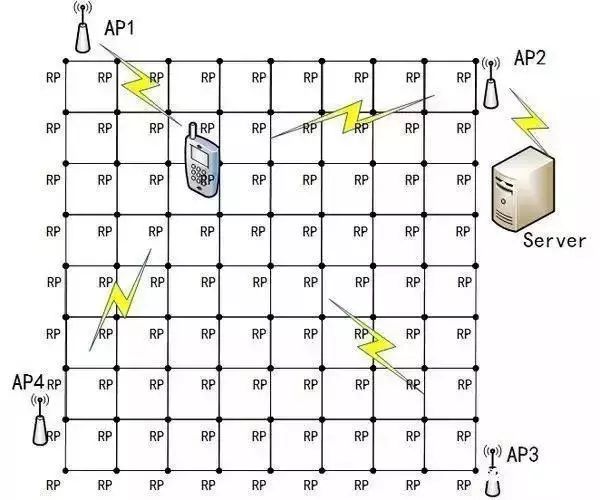
基于Wi-Fi技术的室内定位主要也依据RSSI强度信息来判断用户位置。在已知各个AP位置的前提下,用信号衰减模型计算移动设备与各个AP的距离,用三角定位法确定移动设备的大致位置。
另一类方法则类似于机器学习算法,首先将待检测的室内区域按特定面积进行网格划分,然后获取每个网格内的Wi-Fi信号强度信息,这实际上是一个训练的过程。在训练阶段得到每个网格的信号强度信息,在定位时,通过实时检测信号强度,将与当前信号强度匹配度最高的网格作为移动设备当前的位置。
成熟方案:
WifiSLAM(被苹果收购)、Wifarer、智慧图等。
优缺点:
Wi-Fi方法的优势在于无线网络的覆盖范围大,易于安装,成本低,但其也仅能用于事先了解Wi-Fi环境的建筑或场地内,且精度未达到很高。
超宽带定位(UWB)
一、何为UWB定位技术?
UWB概念的提出可追溯到1960年,但是一直被看作是基带、无载波的脉冲技术,只能用于军事上的雷达系统。直到1989年,美国国防部(DARPA)才首次使用了“超宽带”这个称呼,并规定在-20dB处的绝对带宽大于1.SGHz或相对带宽大于25%的任何信号均称之为超宽带信号。
2002年,FCC(美国联邦通信委员会)对UWB的定义作了修改,规定信号-10dB绝对带宽大于0.5GHz或相对带宽大于、等于20%,就称之为UWB信号。
UWB系统与传统的窄带系统相比有什么区别?
超宽带系统与传统的窄带系统相比,具有穿透力强、功耗低、抗多径效果好、安全性高、系统复杂度低、能提供精确定位精度等优点。因此,UWB技术可以应用于室内静止或者移动物体以及人的定位跟踪与导航,且能提供十分精确的定位精度。根据不同公司使用的技术手段或算法不同,精度可保持在0.1 m~0.5 m。
二、UWB 定位系统组成
1)UWB标签
定位标签附着于定位对象的表面,当标签进入基站的信号覆盖范围内,即自动与基站建立联系,发送电磁波信号来确定标签位置。每一个标签都有唯一的ID号,可通过这个ID号将定位的对象联系起来,使定位基站通过标签找到实际定位的位置。
2)UWB基站
UWB基站分布于定位区域的几何边缘,并对该区域进行信号覆盖。室内定位基站主要功能就是探测标签的数据信息并上传至服务器进行汇总分析。一个定位系统一般要由三个以上的定位基站组成,它们可以接收定位终端(即定位标签)发送的UWB信号,并进行互相关系分析,计算信号传播时延,在通过特定的算法计算出待定位标签与基站之间的距离,再通过有线网络或WLAN传递给定位引擎。
3)定位引擎
运行在PC端程序,通过基站和标签之间的测距结果,结合基站地图信息精确算出标签的具体位置,并呈现在监控终端。
三、UWB定位技术
高端”的定位技术往往采用最“朴素”的定位方法——几何求解定位法
基于位置以及与位置相关的变量信息,建立相应的数学方程组反向解算出标签的位置。
UWB技术具有超高的时间分辨率,保证了UWB可以准确的获得待定位目标的时间,信号飞行的速度是光速(固定值),所以只要知道飞行时间就可以计算出两个设备的距离,结合到多个已知点的距离,就可以通过圆定位的方法求得待定位目标的位置信息。
与蓝牙和WIFI定位方法不同,UWB技术位置信息并不是基于信号强度(RSSI)进行计算,而是通过精确无线信号的发送时刻、接收时刻,并通过算法计算的。
基于测距的定位方式
在UWB技术中应用最广泛的是飞行时间测距法(TOF)和到达时间差法(TDOA)。从定位方式来看均属于多点定位,即确定标签与多个已知坐标点的相对位置关系进行定位。
为什么是多个已知坐标点的相对位置呢?
UWB技术之TOF
飞行时间法(Time of flight,TOF)是一种双向测距技术,它通过测量UWB信号在基站与标签之间往返的飞行时间来计算距离。
把标签和基站之间的通信看做是两人之间的书信交流,移动标签首先向定位基站发送测距请求,基站收到测距请求进行处理,经过一小段时间处理后向移动标签回复确认信息,将发送端发出信号和接收回应的时间间隔记为TTOT,接收端收到数据包和发出回应的时间间隔记为TTAT。那么信号在空中的单向飞行时间TTOF可以计算:
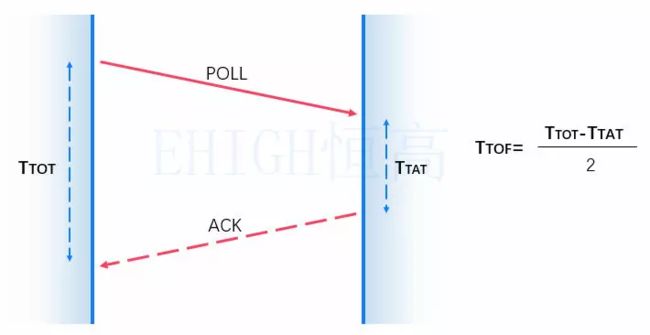
然后根据时间乘以速度等于距离的数学公式,便可算出标签到基站之间的距离。
d = c × TTOF(电磁波传播速度为c)
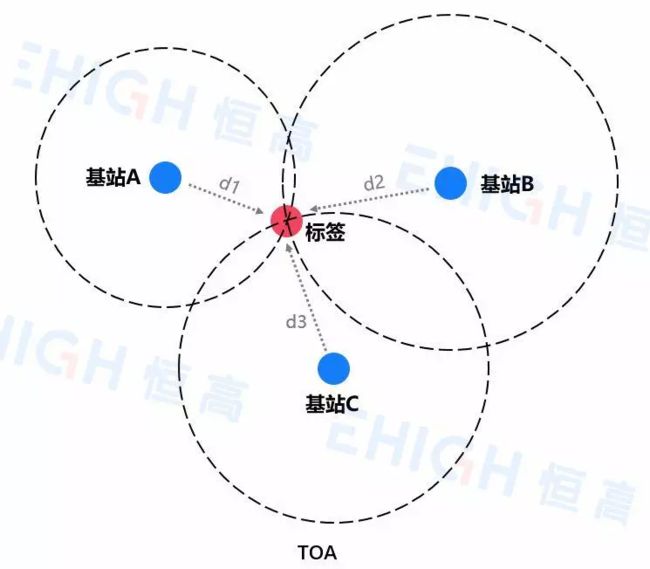
得到了标签到各个基站的距离信息,要知道标签的位置就很轻松了。
在数学关系上,一点到已知点的距离为常数,那么这点一定在以已知点为圆心,以该常数为半径的圆上。以三个已知点和距离作三个圆,他们交于同一个点,该点就是标签的位置。
TOF这种定位方式正是如此,需要基站和标签往返通信,因此就造成了TOF功耗大大提高,续航时间相对较短
UWB技术之TDOA
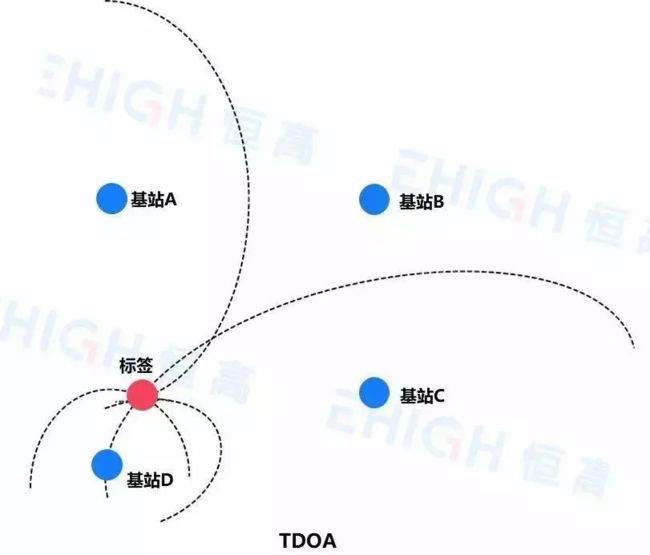
到达时间差(Time Difference of Arrival,TDOA)是一种利用到达时间差进行定位的方法又称为双曲线定位。标签卡对外发送一次UWB信号,在标签无线覆盖范围内的所有基站都会收到无线信号,如果有两个已知坐标点的基站收到信号,标签距离两个基站的间隔不同,那么这两个基站收到信号的时间点是不一样的。
标签与不同基站的距离不同,不同基站收到同一标签信号的时间节点不同,因此得出一个“到达时间差”的概念。
TDOA定位的原理正是利用多个基站接收到信号的时间差来确定标签的位置。
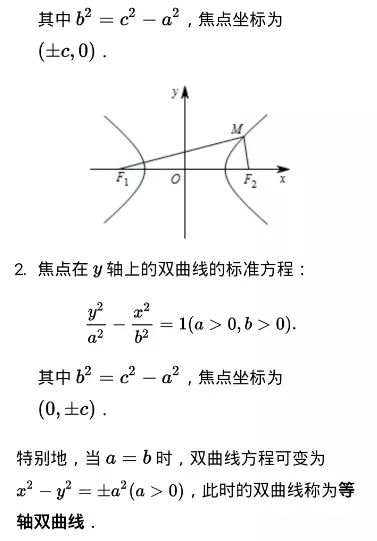
根据数学关系,到已知两点的距离差为常数,也就是说标签发送信号到两基站的时间差为常数,标签的位置一定处于以这两点为焦点的双曲线上。那么有四个已知点(四个定位基站)就会有四条双曲线,四条双曲线交于一点就是标签的位置。
双曲线

具体算法如下:
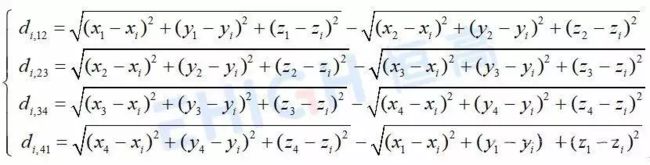
假设测得标签到第n个基站接收到标签所发出的UWB信号的时刻分别为ti(i=1,2,3,4...n),且假设标签到第n个基站的距离为ri(i=1,2,3,4...n)
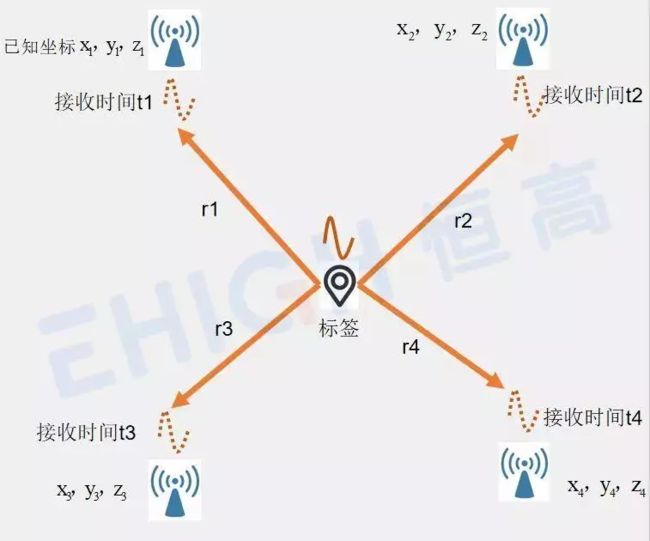
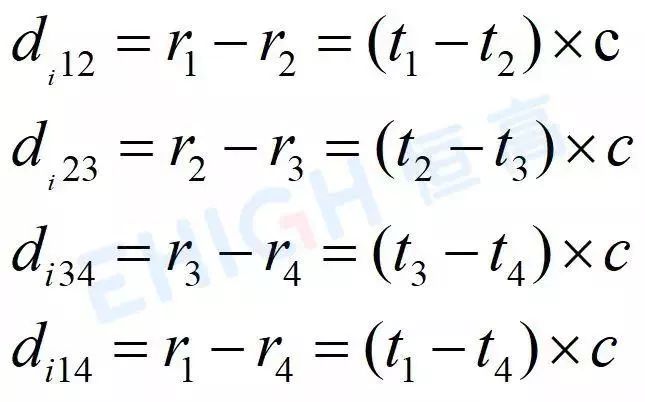
在基站之间完全同步的情况下,得出定位标签相对于四组定位基站(假设1#、2#为第一组,2#、3#为第二组,3#、4#为第三组,4#、1#为第四组)的距离差di12~di14为:
假设空间布有 N 个基站,同时利用多个TDOA 测量值可以构成关于标签位置的双曲线方程组,求解此方程组即可得到标签坐标。
TDOA技术不需要定位标签与定位基站之间进行往复通信,只需要定位标签发射一次UWB信号,工作时长缩短了,功耗也就大大降低了,故能做到更高的定位动态和定位容量。
时间同步
我们可以知道TDOA需要测量到达时间差。如果说TDOA定位的前提是需要测量到达时间差,那么测量到达时间差的前提就是时间必须同步。
标签卡对外发送一次UWB信号,在标签覆盖范围内的所有基站都会收到无线信号,因标签距离基站的距离不同,基站收到信号的时间点是不一样的。
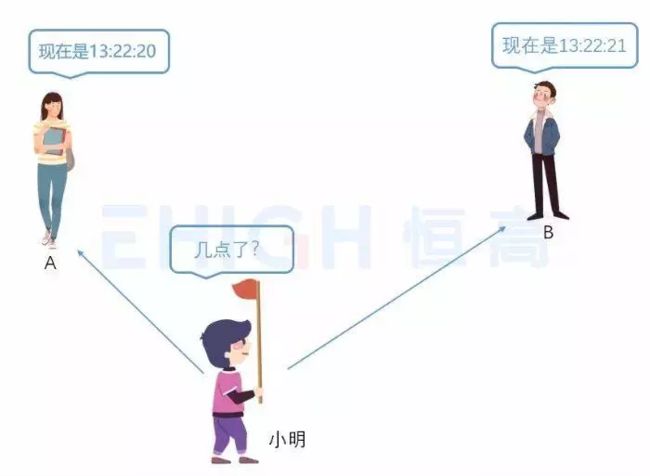
为了能精确测量时间,我们需要对计时工具进行时间调整,使它们都处于同一时间体系下,比如说大家都是标准的北京时间,这就是时间同步
推本溯源——为什么会时间不同步?
每个定位设备内部都有晶体震荡器,它的作用是产生时钟频率,定位设备的UWB信号的收发,都是在该时钟的节拍下进行的,测量收发时间也是以该时钟为基础。这也就是说每个硬件设备都有自己的内部时钟,基站各自按照自己的时间体系运行,这就导致各个基站存在初始时间差。
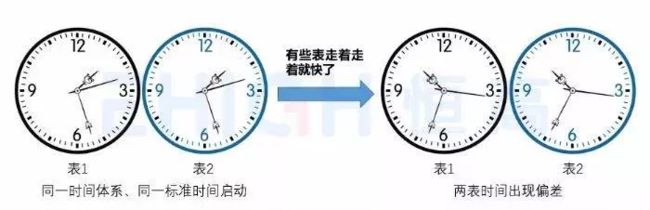
并且,还存在着一个时钟漂移现象,这就使得多个时钟即使在同一个标准时间启动,它们也不可能长期保持同步。就像是我们每个人的手表,走一段时间后就会不准了,主要原因是我们时钟的精度,也就是我们手表所走的1s,并不是标准的1s,而是接近1s,长时间不对表的话,我们的时间体系就会发生偏移。
如何解决时间不同步?
1、有线同步
有线同步就相当于所有的基站都用同一个表,也就是同步控制器。同步控制器通过有线通信的方式,将时间信息传输到每个基站,使每个基站处于同一时间体系,实现时间同步。
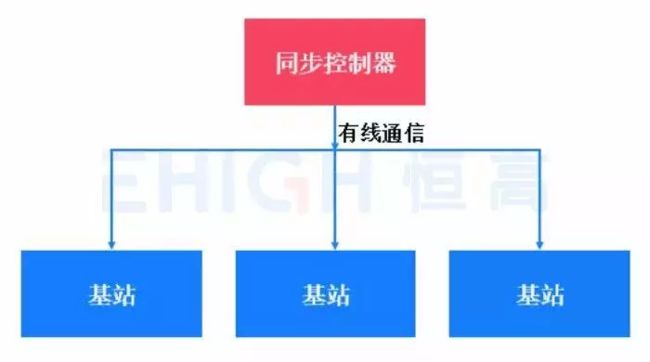
这种同步方式的优势在于时间测量精度高,各个基站之间时间可保持高度同步,并且技术难度低,容易实现。存在的问题在于部署成本较高,因为每个基站都需要通过有线的方式连接到同步控制器,线路规划变得很复杂,部署UWB定位系统时会大量布线。但同步精度会相对来说高一些。
2、无线同步
无线同步就是各个基站通过不断与其他基站交换本队时钟信息,最终达到并且保持全局时间协调一致。也就是说基站之间每隔一段时间进行UWB信号交互,告诉其他基站自己现在处于什么时间,然后各自调整自身时间与其他基站保持一致。
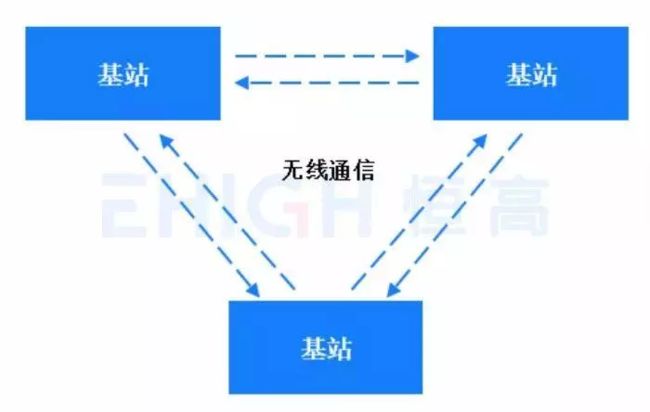
无线同步方法依赖于UWB的测量时间精度,时间精度越高,两个基站之间的时间误差越小,那么它们的时间同步程度越高。无线同步方式的优势在于基站与基站之间不需要有线连接,因此部署难度较低,成本也低。
飞行时间t容易测量吗?
我们可以粗略的计算一下,如果标签和基站之间的距离是30m,那么,电磁波的传播时间是多少?
100ns是什么概念?100ns等于1s的1000万分之1。也就是在你眨眼的一秒,电磁波都可以从标签到基站、再从基站到标签跑500万个来回。
这都还不算什么,真正的困难其实是测量误差。我们都知道测量都是有一定的误差的,测量时间测出来的结果往往都是:
t±Δt,Δt叫做测量误差,误差越小,精度就越高。
如果电磁波实际的飞行时间是100ns,我们测量出来的有可能是101ns、105ns、95ns…
我们再来看看,测量精度要达到10cm,那时间测量误差应该在哪个区间?
也就是说定位系统想要精确定位,定位精度要达到10cm,那么测量电磁波飞行时间的误差必须在0.3ns内,困难程度可想而知。
为什么时间误差总会大于0.3ns
在实际的无线传输环境中,电磁波会受到周围环境如墙壁、玻璃、金属等物体的反射(类似于可见光的反射),产生多径信号。接收节点(基站)往往不仅能接收到直达信号,还能接收到反射路径传播的信号,并且直达路径信号和反射路径信号是相加的关系。
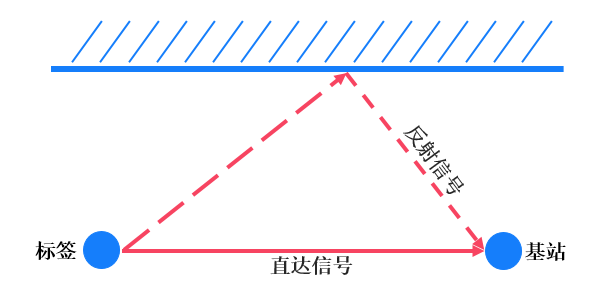
所以,定位系统想要精准测量电磁波的飞行时间,实现精确定位,关键在于接收节点能否正确接收到发射节点(标签)所发送信号的直达路径。
如果接收节点不能分离出信号中的直射路径,则接收节点定位的依据是直射路径信号和反射路径信号相加的结果,从而影响时间信息的获取,对定位精度造成影响。因此为了提高定位的精准度,定位系统需要提取出首达路径信号。
为什么反射信号会影响直达信号?假设信号直达的路径长5m,反射信号需要传播的距离总共为7m。我们可以根据距离=速度*时间,计算出基站分别接收到直达信号、反射信号所需时间。
也就是说,接收节点接收到直达信号、反射信号的时间差为7ns。
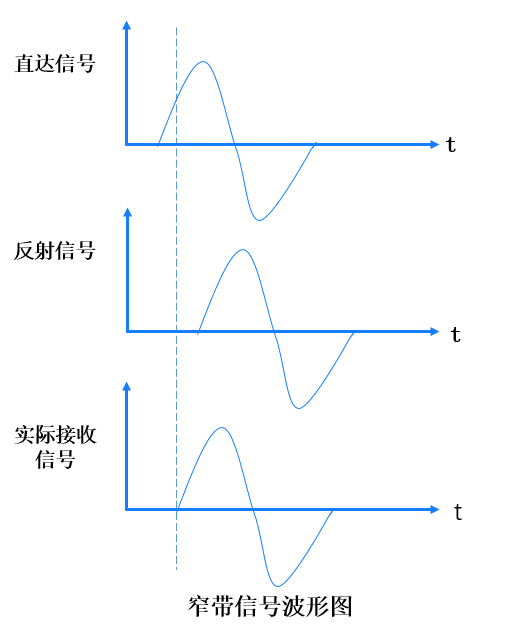
传统窄带信号(如ZigBee)为正弦载波通信,且带宽较窄,完成信号传输所需的时间为几十毫秒。直达信号在7ns时间内不能完成传输,因此,直达信号与反射信号会在时域上重叠,使信号延迟,并在幅值和相位等方面发生了变化,从而产生能量衰减,信噪比下降,导致首达信号并非直达信号,引起测距误差,定位精度也随之下降。
俗话说“只要思想不滑坡,办法总比困难多”。UWB定位技术就是解决这些问题的“办法”。
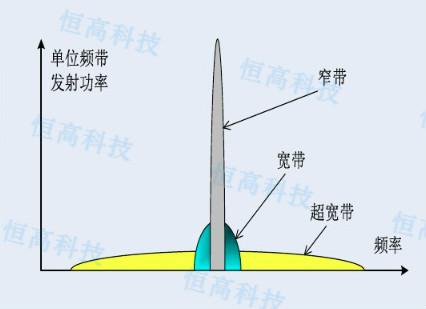
超宽带(UWB)技术是一种无线载波通信技术,即不采用正弦载波,而利用纳秒级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很宽。
从频域来看,超宽带有别于传统的窄带和宽带,它的频域更宽。窄带是指相对宽度(信号带宽与中心频率之比)小于1%,相对带宽在1%到25%之间的被称为宽带,相对带宽大于25%,而且中心频率大于500MHz的被称为UWB。
从时域上讲,超宽带系统有别于传统的通信系统。一般的通信系统是通过发送射频载波进行信号调制,而UWB是利用起、落点的时域脉冲(几十纳秒)直接实现调制,UWB的传输把调制信息过程放在一个非常宽的频带上进行,而且以这一过程中所持续的时间,来决定带宽所占据的频率范围。
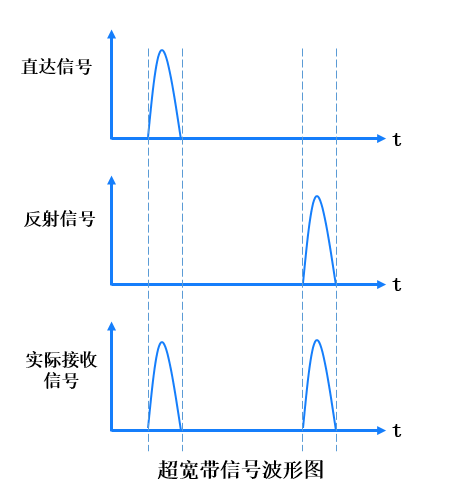
UWB时域信号较窄,使得时间分辨率增强,接收多径反射延时信号与直达信号的时间差一般大于脉冲宽度,因此,信号在时域上是可分离的。上述例子中7ns的时间差,足够完成UWB直达信号的传输(传输时长约2ns),因此系统可快速提取出直达信号,实现精确定位。
UWB技术优势
1)工作时间短、设备功耗低
UWB系统使用间歇的脉冲来发送数据,脉冲持续时间很短,一般在0.20ns1.5ns之间,有很空的占空因数,系统耗电可以做到很低,在高速通信时系统的耗电量仅为几百μW几十mW。民用的UWB设备功率一般是传统移动电话所需功率的1/100左右,是蓝牙设备所需功率的1/20左右。因此,UWB设备的电池寿命,相对于传统无线设备有着很大的优越性。
2)对其他设备干扰小
由于UWB脉冲极窄、频带极宽,其带宽相当于1000个电视频道或3万个FM广播频道,因此单位频宽内的功率密度相当低。美国FCC对UWB的发射功率做了严格限制,其功率密度甚至低于一般的噪声水平(比如,低于一部笔记本电脑的辐射)。因此,UWB对其他设备的影响微乎其微。
3)1S内可同时工作的标签多,容量高
UWB使用的带宽在1GHz以上,甚至可高达几个GHz,那么每发送一个UWB信号的持续时间就非常短了。通俗一点,我们可以将信号通信看作不同宽度车辆行驶,如自行车(UWB信号)、汽车(窄带信号),马路宽度一定(时间资源),车辆越窄,马路上容纳的车辆就越多,如只有自行车在马路上行驶和只有汽车在马路上行驶时,自行车的容量会大大多于汽车。因此,超宽带系统容量大,可同时容纳成百上千个定位标签同时工作。

UWB应用领域
1、隧道人员定位
隧道UWB定位系统支持全天候考勤,对施工人员实时自动(位置)跟踪,结合摄像头可进行无卡检测,全面掌握施工人员在隧道的活动轨迹、位置分布,并且可实现紧急情况下的双向报警。最重要的是,当遇到隧道突发事故,可以迅速找到被困人员的位置信息,保障人员安全的同时,有效提升管理效率。
2、看守所/监狱人员定位
看守所/监狱UWB定位系统支持全天候点名;对犯人进行24小时位置监控、轨迹跟踪;防拆定位手环可实时监测在押人员的生命体征;同时具有电子围栏和视频联动功能,在关键出入口及周界布置禁入边界,在押人员靠近或非法进入即主动告警,降低监管执法的风险使监管工作智能化,提升立体防控能力,快速响应突发事件。

3、化工厂人员定位
化工厂UWB定位系统通过车间超/缺员报警、实时位置查询、电子围栏、超时滞留/静止报警等功能,可实现厂区安全区域管控;通过巡检管理、脱岗/串岗报警,可实现厂区工作人员工作考核管理;同时系统还可联动各类现场传感器、视频监控、报警系统、智能化二道门,可实现化工精细化安全管理和生产过程管控。
4、工地人员定位系统
工地UWB定位系统支持实时定位、智能考勤和工时统计功能,提高工地现场管理效率,维持现场秩序,全方位助力工地智能化监管,实现多场景精确定位、管理调度全局掌控!同时提供电子围栏功能,人员进入危险区域即刻告警;当危险情况发生时,系统可按区域对施工人员下发撤离命令,施工人员也可通过定位标签SOS按键自主报警,安全救援实时保障;可进行多种人员行为监测,有效预防安全事故发生。
5、电厂/变电站人员定位
电厂/变电站UWB定位系统集风险管控、人员管理、电子围栏、巡检过程实时显示、应急救援等功能为一体,助力电力能源行业实现安全生产可控制、安全建设可控制,日常人员管理可控制,全面落实安全生产责任,确保实现安全生产的工作目标。
6、煤矿/矿井人员定位
煤矿/矿井UWB定位系统结合井口唯一性检测装置,进行无卡检测、多卡检测、替卡检测;矿井人员定位系统可对井下人员、车辆进行实时位置跟踪,全面掌握井下人员、车辆的活动轨迹。通过电子围栏功能,可实现区域人数统计和危险区域管控。同时还可联动气体、粉尘等传感器进行环境监测, 在紧急情况下,矿井人员定位系统可实现双向报警,提高事故响应速度。
参考文献
GPS定位实现原理解析
蓝牙定位能否实现厘米级精确定位?
室内定位深度剖析
物联网定位技术大全