1. 下载安装包
官网地址:
http://wiki.ros.org/action/show/Robots/TurtleBot?action=show&redirect=TurtleBot
所有相关的包都在这里, 按需下载(注意选择melodic-devel分支):
我全部下载了, 所有的下载链接如下:
- turtlebot3: https://github.com/ROBOTIS-GIT/turtlebot3/tree/melodic-devel
- turtlebot3_msgs: https://github.com/ROBOTIS-GIT/turtlebot3_msgs/tree/melodic-devel
- turtlebot3_simulations: https://github.com/ROBOTIS-GIT/turtlebot3_simulations/tree/melodic-devel
- turtlebot3_applications: https://github.com/ROBOTIS-GIT/turtlebot3_applications/tree/melodic-devel
- turtlebot3_autorace: https://github.com/ROBOTIS-GIT/turtlebot3_autorace/tree/melodic-devel
- hls_lfcd_lds_driver: https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver/tree/melodic-devel
- open_manipulator: https://github.com/ROBOTIS-GIT/open_manipulator/tree/melodic-devel
- dynamixel_sdk: https://github.com/ROBOTIS-GIT/DynamixelSDK/tree/melodic-devel

下载完成后解压, 并重命名把后面的"-melodic-devel"删掉(不重命名也不影响, 只是我有强迫症), 然后把这些文件夹放到一个文件夹下, 方便后面的操作:

2. 安装
Ctrl+Alt+T 打开终端, 输入:
echo $ROS_PACKAGE_PATH
/opt/ros/melodic/share为ROS包的路径, 现在我们把这些解压后的文件夹复制到这个路径下:
先cd到你放那些包的文件夹下,
sudo chmod 755 -R *
sudo cp -r * /opt/ros/melodic/share/看看复制成功没有
ls /opt/ros/melodic/share/3. 验证和仿真
运行rospack list, 有我们安装的那些包就行了
rospack list部分截图如下:

我们来运行仿真:
roslaunch turtlebot3_gazebo turtlebot3_world.launch
报了错误:
RLException: Invalid
tag: environment variable 'TURTLEBOT3_MODEL' is not set. Arg xml is
The traceback for the exception was written to the log file
TURTLEBOT3_MODEL没有设置, 需要给它指定[burger, waffle, waffle_pi]中的一个, 我们随便指定一个:
在终端输入:
export TURTLEBOT3_MODEL=burger再次运行上面的命令:
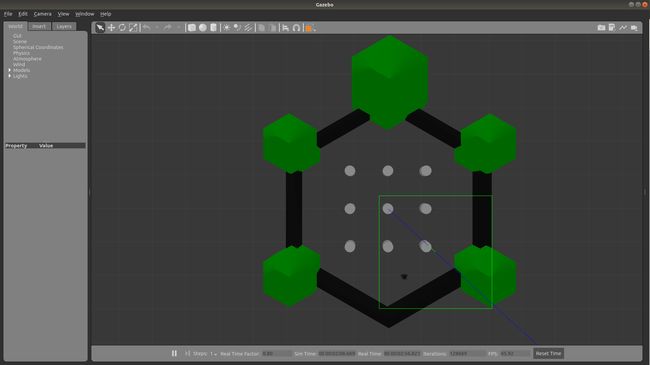
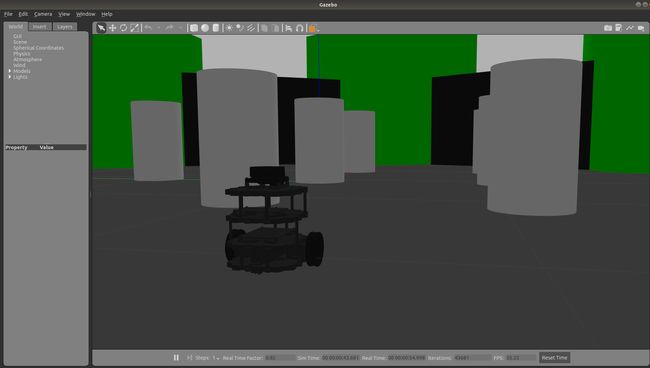
roslaunch turtlebot3_gazebo turtlebot3_world.launch等待一会儿, 看, 我们的TurtleBot3 Burger和一些障碍物出现了:
最后我们把"export TURTLEBOT3_MODEL=burger"添加到.bashrc文件, 免得每次重新设置这个变量:
echo "export TURTLEBOT3_MODEL=burger" >> ~/.bashrc此文原创禁止转载,转载文章请联系博主并注明来源和出处,谢谢!
作者: Raina_RLN https://www.cnblogs.com/raina/