LPRnet轻量级实时车牌识别
LPRNet由轻量级的卷积神经网络组成,所以它可以采用端到端的方法来进行训练。据我们所知,LPRNet是第一个没有采用RNNs的实时车牌识别系统。因此,LPRNet算法可以为LPR创建嵌入式部署的解决方案,即便是在具有较高挑战性的中文车牌识别上。
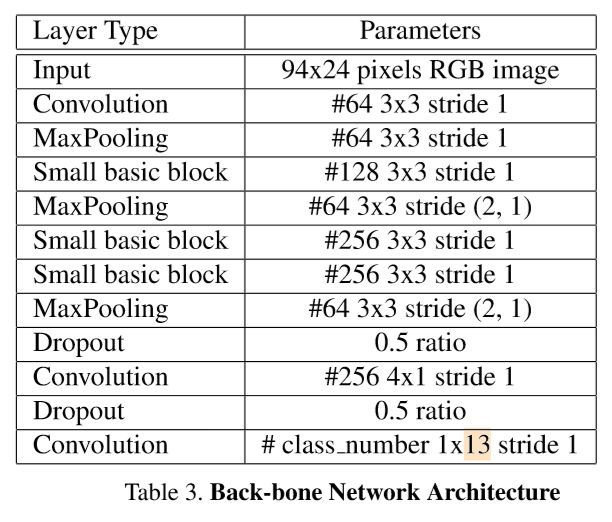
骨干网络的结构在表[3]中进行了描述。骨干网络获取原始的RGB图片作为输入,并且计算出大量特征的空间分布。宽卷积(1*13的卷积核)利用本地字符的上下文从而取代了基于LSTM的RNN网络。骨干子网络的输出可以被认为是一个代表对应字符可能性的序列,它的长度刚到等于输入图像的宽度。由于解码器的输出与目标字符序列的长度是不一致的,因此采用了CTC损失函数,无需分割的端到端训练。CTC 损失函数是一种广泛地用于处理输入和输出序列不对齐的方法。
LPRnet网络结构如下表:
small basic block主要是Inception结构,如下表:

为了进一步地提升模型的表现,增强解码器所得的中间特征图,采用用全局上下文关系进行嵌入[12]。它是通过全连接层对骨干网络的输出层进行计算,随后将其平铺到所需的大小最后再与骨干网络的输出进行拼接 , 加入GAP思想源于Parsenet,parsenet主要图:,右侧部分为加入GAP拼接到feature map上进行识别的表示。

速度:
LPRNet简化模型被移植到各种硬件平台,包括CPU,GPU和FPGA。 结果如表6所示

主网络代码:
import torch.nn as nn import torch #定义samll_basic_block模块,借鉴Inception模块,通过1*3和3*1的卷积核来提取长宽比异常的图像特征,同时减少参数量。 class small_basic_block(nn.Module): def __init__(self, ch_in, ch_out): super(small_basic_block, self).__init__() self.block = nn.Sequential( nn.Conv2d(ch_in, ch_out // 4, kernel_size=1), nn.ReLU(), nn.Conv2d(ch_out // 4, ch_out // 4, kernel_size=(3, 1), padding=(1, 0)), nn.ReLU(), nn.Conv2d(ch_out // 4, ch_out // 4, kernel_size=(1, 3), padding=(0, 1)), nn.ReLU(), nn.Conv2d(ch_out // 4, ch_out, kernel_size=1), ) def forward(self, x): return self.block(x) class LPRNet(nn.Module): def __init__(self, lpr_max_len, phase, class_num, dropout_rate): super(LPRNet, self).__init__() self.phase = phase self.lpr_max_len = lpr_max_len self.class_num = class_num self.backbone = nn.Sequential( nn.Conv2d(in_channels=3, out_channels=64, kernel_size=3, stride=1), # 0 nn.BatchNorm2d(num_features=64), nn.ReLU(), # 2 nn.MaxPool3d(kernel_size=(1, 3, 3), stride=(1, 1, 1)), small_basic_block(ch_in=64, ch_out=128), # *** 4 *** nn.BatchNorm2d(num_features=128), nn.ReLU(), # 6 nn.MaxPool3d(kernel_size=(1, 3, 3), stride=(2, 1, 2)), small_basic_block(ch_in=64, ch_out=256), # 8 nn.BatchNorm2d(num_features=256), nn.ReLU(), # 10 small_basic_block(ch_in=256, ch_out=256), # *** 11 *** nn.BatchNorm2d(num_features=256), # 12 nn.ReLU(), nn.MaxPool3d(kernel_size=(1, 3, 3), stride=(4, 1, 2)), # 14 nn.Dropout(dropout_rate), nn.Conv2d(in_channels=64, out_channels=256, kernel_size=(1, 4), stride=1), # 16 nn.BatchNorm2d(num_features=256), nn.ReLU(), # 18 nn.Dropout(dropout_rate), nn.Conv2d(in_channels=256, out_channels=class_num, kernel_size=(13, 1), stride=1), # 20 nn.BatchNorm2d(num_features=class_num), nn.ReLU(), # *** 22 *** ) #通过1*13的异形卷积核提取特征,宽卷积(1*13的卷积核)利用本地字符的上下文从而取代了基于LSTM的RNN网络 #为了调整映射到每一个字符类的特征的深度,采用了1×1的卷积,作用等同论文中提到的(为了进一步地提升模型的表现,预增强解码器所得的中间特征图, #采用用全局上下文关系进行嵌入。它是通过全连接层对骨干网络的输出层进行计算,随后将其平铺到所需的大小最后再与骨干网络的输出并拼接起来) self.container = nn.Sequential( nn.Conv2d(in_channels=448+self.class_num, out_channels=self.class_num, kernel_size=(1, 1), stride=(1, 1)), # nn.BatchNorm2d(num_features=self.class_num), # nn.ReLU(), # nn.Conv2d(in_channels=self.class_num, out_channels=self.lpr_max_len+1, kernel_size=3, stride=2), # nn.ReLU(), ) def forward(self, x): #保存不同层的特征,目的用于下边拼接global_context特征 keep_features = list() for i, layer in enumerate(self.backbone.children()): x = layer(x) if i in [2, 6, 13, 22]: # [2, 4, 8, 11, 22] keep_features.append(x) #GAP提取全局平均池化特征,拼接起来送入识别container(1*1的卷积) global_context = list() for i, f in enumerate(keep_features): if i in [0, 1]: f = nn.AvgPool2d(kernel_size=5, stride=5)(f) if i in [2]: f = nn.AvgPool2d(kernel_size=(4, 10), stride=(4, 2))(f) f_pow = torch.pow(f, 2) f_mean = torch.mean(f_pow) f = torch.div(f, f_mean) global_context.append(f) x = torch.cat(global_context, 1) x = self.container(x) logits = torch.mean(x, dim=2) return logits def build_lprnet(lpr_max_len=8, phase=False, class_num=66, dropout_rate=0.5): Net = LPRNet(lpr_max_len, phase, class_num, dropout_rate) if phase == "train": return Net.train() else: return Net.eval()