此系列的其他文章:
OpenCV算法学习笔记之初识OpenCV
OpenCV算法学习笔记之几何变换
OpenCV算法学习笔记之对比度增强
OpenCV算法学习笔记之平滑算法
OpenCV算法学习笔记之阈值分割
OpenCV算法学习笔记之形态学处理
OpenCV算法学习笔记之边缘检测(一)
OpenCV算法学习笔记之边缘处理(二)
更多文章可以访问我的博客Aengus | Blog
霍夫直线检测
原理
对于中的任意一条直线,我们以下图为例:
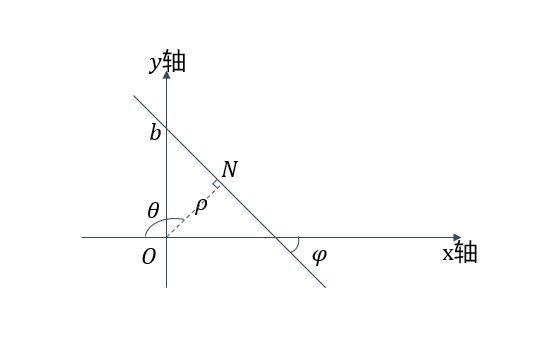
是直线的正切角,是直线的截距,是原点的直线的垂线,;则直线的方程可以用以下方程表示:
所以如果知道平面内的一条直线,那么可以计算出唯一的和,使得此直线与一一对应,所以我们就完成了平面中的直线到霍夫空间的映射。因此如果我们想判断平面上一连串的点是否在一条直线上,只需判断他们映射在平面上的曲线是否相交于一个点即可,如果相交于一点,则共线。
而对于较为复杂的情况,可能会出现点所对应的平面上的曲线有多个相交点的情况,针对这种问题,我们可以设置一个投票器,选择相交曲线最多的点,那么这些相交曲线所对应的即是共线的。
API
OpenCV对二值图提供霍夫检测函数:
void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0, double stn=0)
其中rho代表的步长(分辨率),theta代表的步长(分辨率),这是因为平面中有无数个点,而计算机实现时只能取有限个点,所以需要指定步长,像素为单位,一般取1;threshold代表投票器的阈值,只有大于这个值才会被认为在一条线上;而srn与stn则分别是多通道图片的rho和theta。
标准霍夫直线检测内存消耗较大,执行时间也比较短,采用概率霍夫直线检测可以缓解这一问题,它随机地从边缘二值图中选择前景像素点,确定检测直线的两个参数,本质上还是标准的霍夫直线检测。其函数为:
void HoughLinesP(InputArray image, OutputArray lines, double rho, double theta, int threshold, double minLineLenght=0, double maxLineGap=0)
其中minLineLenght代表最短直线的长度;maxLineGap代表同一直线上的两个点所允许的最大间隙。
霍夫圆形检测
标准霍夫圆形检测
原理
标准霍夫圆形检测的思想与霍夫直线检测类似。
霍夫圆形检测的问题可以简述为:已知平面上的点在多个圆上,那么哪些点在同一个圆上,并计算出圆心坐标。
上述问题可以通过此步骤解决:首先固定一个半径,然后分别以点为圆心,为半径画圆,若在同一个圆上,那么以它们为圆心画的圆的交点就是所求圆的圆心,且其半径就是。具体实现时,可以首先确定一个的范围,然后依次画圆并按照霍夫直线检测的思想对交点进行投票,票数最多的即为目标圆圆心坐标,此时的为目标圆半径。
平面中的任意一个圆都可以表示为,可以利用圆的极坐标公式对圆心进行计算。
Python实现
def hough_circle(image, min_r, max_r, vote_thresh=100):
"""
:param image 输入图像
:param min_r 最小半径
:param max_r 最大半径
:param vote_thresh 投票阈值,小于此值则将此目标圆丢弃
:return 包含目标圆(半径,横坐标,纵坐标)的list
"""
# 宽,高
h, w = image.shape
# 归为整数
minr = round(min_r) + 1
maxr = round(max_r) + 1
# 初始化三维计数器
r_num = int(maxr - minr + 1) # 半径
a_num = int(w - 1 + maxr + maxr + 1) # 圆心横坐标
b_num = int(h - 1 + maxr + maxr + 1) # 圆心纵坐标
accumulator = np.zeros((r_num, b_num, a_num), np.int32)
# 投票计数
for y in range(h):
for x in range(w):
if image[y][x] == 255: # 只对边缘进行霍夫变换
for k in range(r_num):
for theta in np.linspace(0, 360, 180):
# 计算对应的a,b
a = x - (minr+k)*math.cos(theta/180.0*math.pi)
b = y - (minr+k)*math.sin(theta/180.0*math.pi)
# 取整
a = int(round(a))
b = int(round(b))
# 投票
accumulator[k, b, a] += 1
# 筛选投票数大于vote_thresh的圆
circles = []
for k in range(r_num):
for b in range(b_num):
for a in range(a_num):
if accumulator[k, b, a] > vote_thresh:
circles.append((k+minr, b, a))
return circles
基于梯度的霍夫圆形检测
原理
如果已知圆几条切线的方向,那么对其做垂线,垂线相交的点即是圆的圆心。通过这种方法,若得到一张图边缘二值图,对其中的直线做垂线就可以得到目标圆的圆心。对于的确认,也可以通过“投票”的思想,如果条切线距离圆心的距离为,条切线距离圆心的距离为,有,就以作为最终的半径。
API
OpenCV提供函数:
void HoughCircles(InputArray image, OutputArray circles, int method, double dp, double minDist, double param1=100, double param2=100, int minRadius=0, int maxRadius=0)
其中circles是一个vector,每一个都代表;mehod目前只有CV_HOUGH_GRADIENT,代表梯度;dp是计数器分辨率;minDsit是圆心间的最小距离;param1是Canny边缘检测的双阈值中的高阈值,低阈值默认是高阈值的一半;param2代表最小投票数;minRadius是需要检测的圆的最小半径;maxRadius是需要检测圆的最大半径。
角点检测
角点可以简单的认为是两条线的交点,也就是一个物体的“角”。角点处的梯度值和梯度变化率都十分明显,所以这也是大部分角点检测算法入手的地方。
Harris角点检测
原理
Harris角点检测就是利用角点的梯度值变化较大的这个特点进行检测。
其步骤如下:
步骤一:计算分别图像在水平方向和垂直方向上的梯度与:
步骤二:计算两个梯度方向上的乘积,注意代表点乘:
步骤三:使用高斯函数对进行高斯加权(取,ksize=3),计算中心点为的窗口对应的协方差矩阵:
则;
步骤四:计算每个像素点处的Harris响应值(为经验参数):
步骤五:过滤大于某一阈值的Harris响应值,得到的结果就是角点;
API
OpenCV提供函数:
void cornerHarris(InputArray src, OutputArray dst, int blockSize, int ksize, double k, int borderType = BORDER_DEFAULT)
实现Harris角点检测,其中blockSize代表滑块窗口的尺寸,也就是窗口的尺寸;ksize代表Sobel核的大小,所以此API会对图像进行Sobel边缘检测;k是Harris中间参数,经验值0.04~0.06。
Shi-Tomasi角点检测
原理
Shi-Tomasi 算法是Harris 算法的改进,主要不同在最后两个步骤中,Harris 算法最原始的定义是将矩阵 M 的行列式值与 M 的迹相减,再将差值同预先给定的阈值进行比较。后来Shi 和Tomasi 提出改进的方法,若两个特征值中较小的一个大于最小阈值,则会得到强角点。Shi 和Tomasi 的方法比较充分,并且在很多情况下可以得到比使用Harris 算法更好的结果。
API
OpenCV提供函数:
void goodFeaturesToTrack(InputArray image, OutputArray corners, int maxCorners, double qualityLevel, double minDistance, InputArray mask=noArray(), int blockSize=3, bool useHarrisDetector=false, double k=0.04);
其中maxCorners代表可以检测到的最大角点数量;qualityLevel代表检测到的角点的质量等级,角点特征值小于qualityLevel最大特征值的点将被舍弃;minDistance是两个角点间最小间距,以像素为单位;mask是指定检测区域,若检测整幅图像,mask置为空Mat();blockSize是计算协方差矩阵时窗口大小;useHarrisDetector是否使用Harris角点检测,为false,则使用Shi-Tomasi算子;k留给Harris角点检测算子用的中间参数,一般取经验值0.04~0.06,useHarrisDetector=false时,该参数不起作用。
参考
《OpenCV算法精解——基于Python和C++》(张平)第九章
角点检测详细总结及代码示例
第十一节、Harris角点检测原理(附源码)
OpenCV——角点检测原理分析(Harris,Shi-Tomasi、亚像素级角点检测)