这一篇真正开始进入深度学习里面的核心操作了-卷积神经网络,这是继Fully-Connected Neural Nets(全连接神经网络)又比较综合的一次作业,难度会有点。作业 ConvolutionalNetworks.ipynb主要是完成卷积中的两种基本操作:convolution和max pooling,之后会放出两种快速版本,然后瞬间觉得自己写的朴素版本被吊着打;之后重点还得完成一下针对卷积里面的归一化:Spatial Batch Normalization(也就是之前说的2D的Batch Normalization)和Group Normalization(2018年提出来的,前一篇博文中也有提到),教程中主要要看的是:
- lecture 5(对于视频和lecture的顺序我总感觉很迷)
- Convolutional Neural Networks: Architectures, Convolution / Pooling Layers
Convolutional Networks
我想对于卷积(convolution)和池化操作(pooling)操作看完上面的教程应该就很清楚了,况且对于学这门课的,多少有点这方面的基础,我就放一张典型的卷积示意图吧(动图来自以上教程):
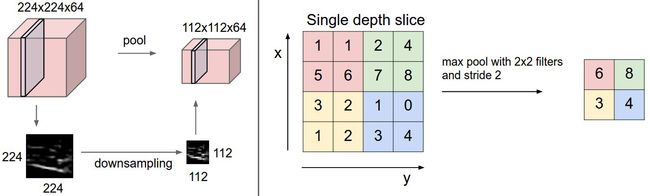
这也来一张池化的示意图,同样来自以上教程中的:
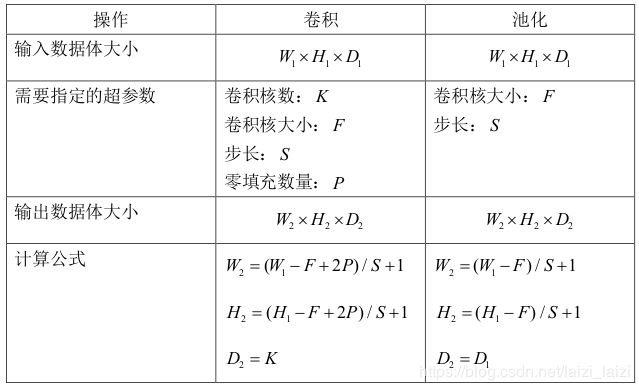
对于最普通的卷积和池化,就如教程里面的提到的(其实卷积里面还有很多别的超参数可以设定的,可以看torch.nn.Conv2d函数的输入参数就可以大致明白了,这里有个动图总结得很好),我把一些输入输出公式总结了一下:
Convolution: Naive forward pass
在padding操作的时候用了一个numpy.pad()函数,我下面的这句话:
xx = np.pad(x[data_point,:,:,:], pad_width=((0,0),(pad,pad),(pad,pad)), mode='constant')意思就是在x上下左右以常值0围上pad圈
没办法,自己一想只能想到循环的方法,这样写出来还是比较容易懂的,就是卷积核在feature map上依次滑动就完成了2D卷积的操作,其中主要要找到卷积之后的feature map上的点与之前对应的位置关系:
conv_forward_naive(x, w, b, conv_param)--->return out, cache
def conv_forward_naive(x, w, b, conv_param):
"""
To save space, delete the comment.
"""
out = None
###########################################################################
# TODO: Implement the convolutional forward pass. #
# Hint: you can use the function np.pad for padding. #
###########################################################################
# *****START OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
stride = conv_param['stride']
pad = conv_param['pad']
N, C, H, W = x.shape
F, WC, HH, WW = w.shape # actually, WC is equal to C
H_out = int(1 + (H + 2 * pad - HH) / stride)
W_out = int(1 + (W + 2 * pad - WW) / stride)
out = np.zeros((N, F, H_out, W_out))
# In numpy, 'out[:,:,:]' is equal to 'out' if out has 3-D
for data_point in range(N):
xx = np.pad(x[data_point,:,:,:], pad_width=((0,0),(pad,pad),(pad,pad)), mode='constant')
for filt in range(F):
for hh in range(H_out):
for ww in range(W_out):
# Do not forget bias term!!
out[data_point, filt, hh, ww] = np.sum(w[filt,:,:,:] * xx[:,stride*hh:stride*hh+HH,stride*ww:stride*ww+WW]) + b[filt]
# *****END OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
###########################################################################
# END OF YOUR CODE #
###########################################################################
cache = (x, w, b, conv_param)
return out, cache
Convolution: Naive backward pass
反向传播一向就比前向传播要稍微难写一点。但是最关键的还是要有一个计算图的概念,就是上游梯度该怎么分配给原先feature map中的各个点,分给卷积核中的各个点,以及怎么分配给偏置,其实这时候再去看上面的卷积动图就会很有帮助。
解决思路:在卷积核滑动的过程中,可以想象成有很多的add gate和multiply gate,无非就是上游梯度乘以权值赋给dx,上游梯度乘以feature map中的值赋给dx,而索引还是和前向传播中差不多(索引就是为了划出那块感受野)
dx[n,:,:,:] = dx_x[:,pad:-pad,pad:-pad]这句话就是为了去掉边上那几圈padding,只保留valid那块
conv_backward_naive(dout, cache)--->return dx, dw, db
def conv_backward_naive(dout, cache):
"""
To save space, delete the comment.
"""
dx, dw, db = None, None, None
###########################################################################
# TODO: Implement the convolutional backward pass. #
###########################################################################
# *****START OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
x, w, b, conv_param = cache
stride = conv_param['stride']
pad = conv_param['pad']
N, F, H_out, W_out = dout.shape
F, WC, HH, WW = w.shape
dw = np.zeros(w.shape)
dx = np.zeros(x.shape)
db = np.zeros(b.shape)
for n in range(N):
xx = np.pad(x[n,:,:,:], pad_width=((0,0),(pad,pad),(pad,pad)), mode='constant')
dx_x = np.zeros(xx.shape)
for filt in range(F):
for hh in range(H_out):
for ww in range(W_out):
dw[filt,:,:,:] += dout[n,filt,hh,ww] * xx[:,stride*hh:stride*hh+HH,stride*ww:stride*ww+WW]
db[filt] += dout[n,filt,hh,ww]
dx_x[:,stride*hh:stride*hh+HH,stride*ww:stride*ww+WW] += dout[n,filt,hh,ww] * w[filt,:,:,:]
dx[n,:,:,:] = dx_x[:,pad:-pad,pad:-pad]
# *****END OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
###########################################################################
# END OF YOUR CODE #
###########################################################################
return dx, dw, db
Max-Pooling: Naive forward
只要之前的卷积的前向传播能写出来了,最大池化的前向传播也是同样的道理,甚至还要更简单,因为想象一下也是一个取最大值的核在feature map上不断地滑动,取出感受野里面的最大值赋给生成的feature map对应点就好了,反正用循环的方法还是很朴素易懂的:
max_pool_forward_naive(x, pool_param)--->return out, cache
def max_pool_forward_naive(x, pool_param):
"""
To save space, delete the comment.
"""
out = None
###########################################################################
# TODO: Implement the max-pooling forward pass #
###########################################################################
# *****START OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
pool_height = pool_param['pool_height']
pool_width = pool_param['pool_width']
stride = pool_param['stride']
N, C, H, W = x.shape
H_out = int(1 + (H - pool_height) / stride)
W_out = int(1 + (W - pool_width) / stride)
out = np.zeros((N, C, H_out, W_out))
for data_point in range(N):
for channel in range(C):
for hh in range(H_out):
for ww in range(W_out):
out[data_point,channel,hh,ww] = np.max(x[data_point,channel,stride*hh:stride*hh+pool_height,stride*ww:stride*ww+pool_width])
# *****END OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
###########################################################################
# END OF YOUR CODE #
###########################################################################
cache = (x, pool_param)
return out, cache
Max-Pooling: Naive backward
这时看一下上面的最大池化的图就会帮助理解,核心思路就是:要找到前向传播的时候感受野里面最大值所在的那个索引,只把上游梯度传给它就行了,其他的位置梯度为0。我用了一个np.where()函数,能返回最大值的行列号索引。其实不用这个,直接用mask的思想也可以完成,比如把下面的31-33行改成如下:
mask = temp==np.max(temp)
dx[n,channel,stridehh:stridehh+pool_height,strideww:strideww+pool_width] = dout[n,channel,hh,ww] * mask
max_pool_backward_naive(dout, cache)--->return dx
def max_pool_backward_naive(dout, cache):
"""
A naive implementation of the backward pass for a max-pooling layer.
Inputs:
- dout: Upstream derivatives
- cache: A tuple of (x, pool_param) as in the forward pass.
Returns:
- dx: Gradient with respect to x
"""
dx = None
###########################################################################
# TODO: Implement the max-pooling backward pass #
###########################################################################
# *****START OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
x, pool_param = cache
pool_height = pool_param['pool_height']
pool_width = pool_param['pool_width']
stride = pool_param['stride']
N, C, H, W = x.shape
_, _, H_out, W_out = dout.shape
dx = np.zeros(x.shape)
for n in range(N):
for channel in range(C):
for hh in range(H_out):
for ww in range(W_out):
temp = x[n,channel,stride*hh:stride*hh+pool_height,stride*ww:stride*ww+pool_width]
index = np.where(temp==np.max(temp))
dx[n,channel,stride*hh:stride*hh+pool_height,stride*ww:stride*ww+pool_width][index] = \
dout[n,channel,hh,ww]
# *****END OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
###########################################################################
# END OF YOUR CODE #
###########################################################################
return dx
fast layers/sandwich
在fast_layers.py里面已经给出了很多快速版本,依赖于Cython扩展,不过这都不用我们弄,接口都跟我们的一样。之后就可以看到快速版本简直分分钟吊打我们的版本,最慢的都比我们快100倍左右(手动捂脸),之后我们就都用这快速版本了(原理还需研究)。
之后就是去layer_utils.py搭建conv_relu_pool_forward, conv_relu_pool_backward, conv_relu_forward, conv_relu_backward几个集成函数,都是简单的调用,想叠三明治一样,这就不多说了。
Three-layer ConvNet
到这里就是用之前的层来搭建一个三层的卷积神经网络并训练一下。架构是conv - relu - 2x2 max pool - affine - relu - affine - softmax,一个卷积加两个仿射,可以考虑用conv_relu_pool_forward、affine_relu_forward和affine_forward函数构建。有了之前的基础层,现在代码会很简洁,具体请看cnn.py
Spatial Batch Normalization
现在的Batch Normalization是对卷积完的feature map做归一化,所以称作Spatial Batch Normalization,也就是2D的,输入shape是(N, C, H, W),为每一C channel对N,H,W计算统计值。
forward
其实这里不需要真的沿着N,H,W计算均值和方差,只要通过一个reshape再调用之前的batchnorm_forward就行了,这里要注意的一点就是:后面reshape的顺序要和前面的transpose顺序对应:
spatial_batchnorm_forward(x, gamma, beta, bn_param)--->return out, cache
# *****START OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
# Note: reshape must be correspond to transpose order
N, C, H, W = x.shape
x = x.transpose(0, 2, 3, 1).reshape(N * H * W, C)
out, cache = batchnorm_forward(x, gamma, beta, bn_param)
out = out.reshape(N, H, W, C).transpose(0, 3, 1, 2)
# *****END OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
backward
反向传播也是类似的:
spatial_batchnorm_backward(dout, cache)--->return dx, dgamma, dbeta
# *****START OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
N, C, H, W = dout.shape
dout = dout.transpose(0, 2, 3, 1).reshape(N * H * W, C)
dx, dgamma, dbeta = batchnorm_backward_alt(dout, cache)
dx = dx.reshape(N, H, W, C).transpose(0, 3, 1, 2)
# *****END OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
Group Normalization
这在Batch Normalization那篇中也有提到,Group Normalization和Layer normaliztion很像,是何凯明在2018年的ECCV中提出来的,与Layer normaliztion对每一个data point计算整个feature不同,Group Normalization是把每一个data point的feature分成很多group分别归一化。
forward
因为, 都是(1,C,1,1)的shape,所以我们先用numpy.squeeze()处理了一下,变成shape为(C,)的,然后调用前面的1D的 layernorm_forward,用循环的方式,一组组的归一化:
spatial_groupnorm_forward(x, gamma, beta, G, gn_param)--->return out, cache
def spatial_groupnorm_forward(x, gamma, beta, G, gn_param):
"""
To save space, delete the comment.
"""
out, cache = None, None
eps = gn_param.get('eps',1e-5)
###########################################################################
# TODO: Implement the forward pass for spatial group normalization. #
# This will be extremely similar to the layer norm implementation. #
# In particular, think about how you could transform the matrix so that #
# the bulk of the code is similar to both train-time batch normalization #
# and layer normalization! #
###########################################################################
# *****START OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
N, C, H, W = x.shape
x = x.transpose(0, 2, 3, 1).reshape(N * H * W, C)
out = np.zeros(x.shape)
cache = []
f_p_g = int(C / G) # feature_per_group
for group in range(G):
x_piece = x[:,group*f_p_g:group*f_p_g + f_p_g]
gamma_piece = np.squeeze(gamma)[group*f_p_g:group*f_p_g + f_p_g]
beta_piece = np.squeeze(beta)[group*f_p_g:group*f_p_g + f_p_g]
out_piece, cache_piece = layernorm_forward(x_piece, gamma_piece, beta_piece, gn_param)
out[:,group*f_p_g:group*f_p_g + f_p_g] = out_piece
cache.append(cache_piece)
out = out.reshape(N, H, W, C).transpose(0, 3, 1, 2)
# *****END OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
###########################################################################
# END OF YOUR CODE #
###########################################################################
return out, cache
backward
反向传播的时候也是一组一组的传给layernorm_backward就行,因为我初始化, 的时候是初始化为1维的,没有初始化为4维的,所以之后就用了numpy.expand_dims()函数,当然可以一开始就初始化成4维的,然后切出来喂给layernorm_backward也行,之后就不用拓展维度了:
spatial_groupnorm_backward(dout, cache)--->dx, dgamma, dbeta
def spatial_groupnorm_backward(dout, cache):
"""
To save space, delete the comment.
"""
dx, dgamma, dbeta = None, None, None
###########################################################################
# TODO: Implement the backward pass for spatial group normalization. #
# This will be extremely similar to the layer norm implementation. #
###########################################################################
# *****START OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
N, C, H, W = dout.shape
G = len(cache)
f_p_g = int(C / G) # feature_per_group
dout = dout.transpose(0, 2, 3, 1).reshape(N * H * W, C)
dx = np.zeros(dout.shape)
dgamma = np.zeros(C)
dbeta = np.zeros(C)
for g in range(G):
dout_piece = dout[:,g*f_p_g:g*f_p_g+f_p_g]
dx_p, dgamma_p, dbeta_p = layernorm_backward(dout_piece, cache[g])
dx[:,g*f_p_g:g*f_p_g+f_p_g] = dx_p
dgamma[g*f_p_g:g*f_p_g+f_p_g] = dgamma_p
dbeta[g*f_p_g:g*f_p_g+f_p_g] = dbeta_p
dx = dx.reshape(N, H, W, C).transpose(0, 3, 1, 2)
dgamma = np.expand_dims(dgamma, axis=0)
dgamma = np.expand_dims(np.expand_dims(dgamma, axis=-1), axis=-1)
dbeta = np.expand_dims(dbeta, axis=0)
dbeta = np.expand_dims(np.expand_dims(dbeta, axis=-1), axis=-1)
# *****END OF YOUR CODE (DO NOT DELETE/MODIFY THIS LINE)*****
###########################################################################
# END OF YOUR CODE #
###########################################################################
return dx, dgamma, dbeta
结果
具体结果请看:ConvolutionalNetworks.ipynb
链接
前后面的作业博文请见:
- 上一篇的博文:Dropout
- 下一篇的博文:PyTorch学习