子控制器
INACTIVE
子控制器执行时进行数据监视和模型更新。DCS没有MV输出。
ACTIVE
基于DCS的BRC和ERC在运行中,同时DCS PID等在远程模式下接受来自Exasmoc计算的MV。
计算
INACTIVE
更新输入数据并进行计算,但DCS没有输出。
ACTIVE
更新输入数据,计算完毕,结果输出到DCS。
A3搭建模块概述
本节的目的是:在用户开始使用本说明手册用于Exasmoc在线控制器对工厂进行操作之前,向用户概述APC整体项目工程。
Exasmoc由以下模块组成:
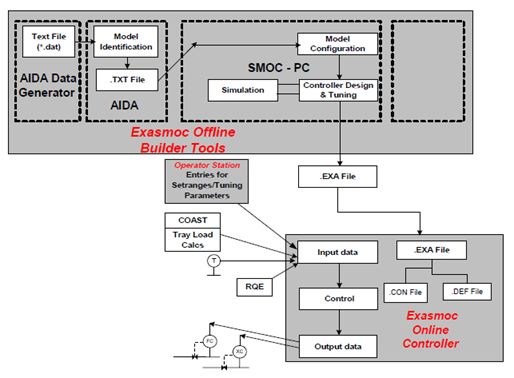
AIDAPro
AIDA Pro(先进辨识和数据分析)是一个基于Windows的软件包,用于预估流程单元的线性动态模型。AIDAPro是离线先进控制软件包PCTP(过程控制技术包)的一个软件小包。需要一个处理单元的线性动态模型来实现Exasmoc的模型预测控制应用程序。
在工厂数据的基础上推导工厂的动态模型称为辨识。在采集过程数据时,给定采样周期(通常为1分钟),对感兴趣单元执行工厂测试。采集的数据包括工厂操作(过程输入或自变量)的设定点,受过程输入变化影响的工厂运行变量,未来先进控制方案中调节或优化的目标(过程输出或因变量),以及提供当前工厂条件信息的一些相关变量,以帮助获得更准确的模型(可测量的干扰变量)。
例如,典型的独立变量是:
-PID控制器设定点(流量,温度和压力),
- 控制阀阀位。
典型的因变量是: - 流程性能或约束测量值(流量,温度,压力,在线分析仪测量值,阀位),
计算变量(例如估计的测量值)。
典型的干扰变量是: - 进料速率; 进料温度,进料质量,
- 与在线分析仪测量值相关的温度或压力,
- PID控制器的过程测量值。
工厂测试涉及到多个感兴趣的独立变量时,需要一个接一个分开测试。选择并监控阶跃大小和重复次数,以便在最小化工厂扰动的同时实现期望的阶跃幅度以获得有用的模型。根据应用和操作条件(阶跃测试,伪随机二进制序列(PRBS)),可将不同类型的干扰信号用于工厂测试。
原文:
Sub-Controller
INACTIVE
Data monitoring and Model is updated during execution of Sub Controller. There is no MV output to DCS.
ACTIVE
DCS based BRC and ERC in operation also DCS PID’s etc in a remote mode to accept MV’s from Exasmoc Calculation
Calculation
INACTIVE
Input data is updated and calculation is done, but there is no output to DCS.
ACTIVE
Input data is updated, calculation is done, and the result is output to DCS.
A3. Overview of Building Blocks
The purpose of this section is to provide the user an overview of the total APC project engineering before user start making use of this instruction manual for operating his/her plant with Exasmoc online controller.
Exasmoc is composed of following functionalities:
AIDAPro
AIDA Pro(Advanced Identification and Data Analysis) is a Windows based software package used to estimate a linear dynamic model for a process unit. AIDAPro is one package of Off-line Advanced Control general package PCTP (Process Control technology Package).A linear dynamic model of a process unit is required to implement a Model Predictive control application for Exasmoc.
Deriving a dynamic model for a plant on the basis of plant data is called identification. A plant test is performed on the unit of interest while process data is collected at a given sampling period, typically one-minute. Collected data include the set-point of the plant operating handles (the process inputs, or independent variables), the plant operating variables that are affected by changes in the process inputs and for which there are regulation or optimization objectives in the future advanced control scheme (the process outputs, or dependent variables), and a number of associated variables that provide information on the current plant conditions and help obtain a more accurate model (the measured disturbance variables ).
For example, typical independent variables are:
-PID controller set points (flow, temperature, and pressure),
-Desired control valves position.
Typical dependent variables are:
-Process performance or constraint measurements (flow, temperature, pressure, on-line Analyzer measurement, valve position),
Calculated variable (e.g. inferred measurement).
Typical disturbance variables are:
-Feed rate; feed temperature, feed quality,
-Temperature or pressure correlated to on-line Analyzer measurement,
-Process measurement of a PID controller.
The plant test involves stepping the independent variables of interest, multiple times, generally one after the other. The step size and number of repetitions is selected and monitored closely, in order to minimize the plant disturbances, while achieving the desired level of excitation to obtain a useful model. Different types of disturbance signals can be used for plant tests depending on the application and conditions of operation (step tests, Pseudo Random Binary Sequence (PRBS)).
2017.3.27