BIP9允许部署多个向后兼容的软分叉,通过旷工在一个目标周期内投票,如果达到激活阈值nRuleChangeActivationThreshold,就能成功的启用该升级。在实现方面,通过重定义区块头信息中的version字段,将version字段解释为bit vector,每一个bit可以用来跟踪一个独立的部署,在满足激活条件之后,该部署将会生效,同时该bit可以被其他部署使用。目前通过BIP9成功进行软分叉有BIP68, 112, 113, 于2016-07-04 23:16:01 高度:419328成功激活.
BIP9部署设置
每一个进行部署的BIP9,都必须设置bit位、开始时间、过期时间。
struct BIP9Deployment {
int bit;
int64_t nStartTime;
int64_t nTimeout;
};
// namespace:Consensus
struct Params {
...
uint32_t nRuleChangeActivationThreshold;
uint32_t nMinerConfirmationWindow;
BIP9Deployment vDeployments[MAX_VERSION_BITS_DEPLOYMENTS]; // BIP9
uint256 powLimit;
bool fPowAllowMinDifficultyBlocks;
bool fPowNoRetargeting;
int64_t nPowTargetSpacing;
int64_t nPowTargetTimespan;
...
};
bit通过1 << bit方式转换成一个uint32_t的整数,在检验一个BIP9部署是否成功激活的时候使用了Condition(...)函数,来验证一个区块是否赞成该部署。
bool Condition(const CBlockIndex *pindex, const Consensus::Params ¶ms) const {
return ((
(pindex->nVersion & VERSIONBITS_TOP_MASK) ==VERSIONBITS_TOP_BITS) &&
(pindex->nVersion & Mask(params)) != 0);
}
uint32_t Mask(const Consensus::Params ¶ms) const {
return ((uint32_t)1) << params.vDeployments[id].bit;
}
逻辑分析
- 首先验证该version是有效的version设置(001)
- 验证块的版本号中是否设置了指定的bit位
- Mask()函数通过将1左移BIP9部署中设定的bit,生成一个该区块代表的version
开始时间和过期时间主要为了在检查BIP9部署状态时,提供状态判断的依据和临界值。比如如果区块的中位数时间超过了过期时间nTimeTimeout,则判断该BIP9部署已经失败(后面会详细拆解)。
if (pindexPrev->GetMedianTimePast() >= nTimeTimeout) {
stateNext = THRESHOLD_FAILED;
} else if (pindexPrev->GetMedianTimePast() >= nTimeStart) {
stateNext = THRESHOLD_STARTED;
}
if (pindexPrev->GetMedianTimePast() >= nTimeTimeout) {
stateNext = THRESHOLD_FAILED;
break;
}
部署状态转换
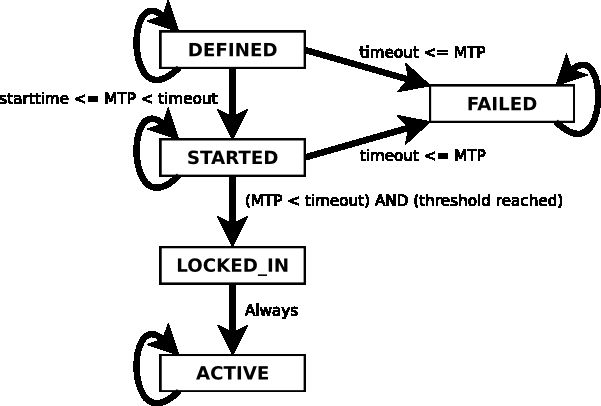
BIP9部署中定义了所有软分叉升级的初始状态均为THRESHOLD_DEFINED,并定义创始区块状态为THRESHOLD_DEFINED, 另外如果在程序中遇到blockIndex为nullptr时,均返回THRESHOLD_DEFINED状态。
具体转换过程如下:THRESHOLD_DEFINED为软分叉的初始状态,如果过去中位数时间(MTP)大于nStartTIme,则状态转换为THRESHOLD_STARTED,如果MTP大于等于nTimeout,则状态转换成THRESHOLD_FAILED;如果在一个目标周期(2016个区块)内赞成升级的区块数量占95%以上(大约1915个区块),则状态转换成THRESHOLD_LOCKED_IN,否则转换成THRESHOLD_FAILED;在THRESHOLD_LOCKED_IN之后的下一个目标周期,状态转换成THRESHOLD_ACTIVE,同时该部署将保持该状态。
enum ThresholdState {
THRESHOLD_DEFINED,
THRESHOLD_STARTED,
THRESHOLD_LOCKED_IN,
THRESHOLD_ACTIVE,
THRESHOLD_FAILED,
};
业务逻辑
基类AbstractThresholdConditionChecker定义了通过共识规则检查BIP9部署的状态。有如下方法,其中最后两个方法在基类中实现,子类继承了该方法的实现:
- Condition(...)检测一个区块是否赞成一个软分叉升级:首先验证该区块version是否有效的version格式, 然后检测该version是否设置了相应个bit位
- BeginTime(...)返回共识规则中的开始投票时间(采用MTP验证 pindexPrev->GetMedianTimePast() >= nTimeStart)
- EndTime(...)返回共识规则中的设置的过期时间
- Period(...)返回共识规则中的一个目标周期(当前主链的目标周期为2016个区块)
- Threshold(...)返回nRuleChangeActivationThreshold,表示满足软分叉升级的最低要求
- GetStateFor(...)在提供共识规则、开始检索的区块索引、以及之前缓存的状态数据判断当前部署的状态(后面会详细分析其逻辑)
- GetStateSinceHeightFor(...)函数的作用是查找从哪个区块高度开始,该部署的状态就已经和当前一致
class AbstractThresholdConditionChecker {
protected:
virtual bool Condition(const CBlockIndex *pindex, const Consensus::Params ¶ms) const = 0;
virtual int64_t BeginTime(const Consensus::Params ¶ms) const = 0;
virtual int64_t EndTime(const Consensus::Params ¶ms) const = 0;
virtual int Period(const Consensus::Params ¶ms) const = 0;
virtual int Threshold(const Consensus::Params ¶ms) const = 0;
public:
ThresholdState GetStateFor(const CBlockIndex *pindexPrev, const Consensus::Params ¶ms, ThresholdConditionCache &cache) const;
int GetStateSinceHeightFor(const CBlockIndex *pindexPrev, const Consensus::Params ¶ms, ThresholdConditionCache &cache) const;
};
类VersionBitsConditionChecker继承了AbstractThresholdConditionChecker。实现了:
- BeginTime(const Consensus::Params ¶ms)
- EndTime(const Consensus::Params ¶ms)
- Period(const Consensus::Params ¶ms)
- Threshold(const Consensus::Params ¶ms)
- Condition(const CBlockIndex *pindex, const Consensus::Params ¶ms)
class VersionBitsConditionChecker : public AbstractThresholdConditionChecker {
private:
// maybe: DEPLOYMENT_TESTDUMMY,DEPLOYMENT_CSV,MAX_VERSION_BITS_DEPLOYMENTS
const Consensus::DeploymentPos id;
protected:
int64_t BeginTime(const Consensus::Params ¶ms) const {
return params.vDeployments[id].nStartTime;
}
int64_t EndTime(const Consensus::Params ¶ms) const {
return params.vDeployments[id].nTimeout;
}
int Period(const Consensus::Params ¶ms) const {
return params.nMinerConfirmationWindow;
}
int Threshold(const Consensus::Params ¶ms) const {
return params.nRuleChangeActivationThreshold;
}
bool Condition(const CBlockIndex *pindex, const Consensus::Params ¶ms) const {
return ((
(pindex->nVersion & VERSIONBITS_TOP_MASK) == VERSIONBITS_TOP_BITS) && (pindex->nVersion & Mask(params)) != 0);
}
...
}
另个一重要的类VersionBitsCache,包括一个方法和一个数组。该数组作为内存缓存使用,该数组的成员是一个map,当检查一个BIP9部署的状态时,如果在检查过程中判断出部署状态,该map会以区块索引为键值,以状态信息(int)为值,缓存起来,在下次检查时可以在该区块位置直接得到其状态信息,对程序起到了优化的作用,避免重复的检索。
struct VersionBitsCache {
ThresholdConditionCache caches[Consensus::MAX_VERSION_BITS_DEPLOYMENTS];
void Clear();
};
typedef std::map ThresholdConditionCache;
另外WarningBitsConditionChecker类也继承了AbstractThresholdConditionChecker类,实现了对未知升级的追踪与警告。一旦nVersion中有未预料到的位被设置成1,mask将会生成非零的值。当未知升级被检测到处THRESHOLD_LOCKED_IN状态,软件应该警告用户即将到来未知的软分叉。在下一个目标周期,处于THRESHOLD_ACTIVE状态是,更应该强调警告用户。
需要说明的是:未知升级只有处于LOCKED_IN或ACTIVE的条件下才会发出警告
...
WarningBitsConditionChecker checker(bit);
ThresholdState state = checker.GetStateFor(pindex, chainParams.GetConsensus(), warningcache[bit]);
if (state == THRESHOLD_ACTIVE || state == THRESHOLD_LOCKED_IN) {
if (state == THRESHOLD_ACTIVE) {
std::string strWarning =
strprintf(_("Warning: unknown new rules activated (versionbit %i)"), bit);
SetMiscWarning(strWarning);
if (!fWarned) {
AlertNotify(strWarning);
fWarned = true;
}
} else {
warningMessages.push_back(
strprintf("unknown new rules are about to activate (versionbit %i)", bit));
}
}
...
代码拆解
-
GetAncestor(int height)函数在整个模块中的使用率非常高,其作用就是为了返回指定高度的区块索引,作用非常简单但是其代码逻辑不太好理解。可以把整个区块链简单的看成就是一个链表结构,为了获得指定高度的节点信息,一般通过依次移动指针到指定区块即可。在该模块中,使用CBlockIndex类中的pskip字段,配合
GetSkipHeight(int height)函数,能够快速定位到指定高度的区块,优化了执行的效率。CBlockIndex *CBlockIndex::GetAncestor(int height) { if (height > nHeight || height < 0) { return nullptr; } CBlockIndex *pindexWalk = this; int heightWalk = nHeight; while (heightWalk > height) { int heightSkip = GetSkipHeight(heightWalk); int heightSkipPrev = GetSkipHeight(heightWalk - 1); if (pindexWalk->pskip != nullptr && (heightSkip == height || (heightSkip > height && !(heightSkipPrev < heightSkip - 2 && heightSkipPrev >= height)))) { pindexWalk = pindexWalk->pskip; heightWalk = heightSkip; } else { assert(pindexWalk->pprev); pindexWalk = pindexWalk->pprev; heightWalk--; } } return pindexWalk; } static inline int GetSkipHeight(int height) { if (height < 2) { return 0; } return (height & 1) ? InvertLowestOne(InvertLowestOne(height - 1)) + 1 : InvertLowestOne(height); } -
在整个模块中进行时间比较判断是都使用了GetMedianTimePast(), 其作用就是找出当前区块前的10个区块,排序后,返回第5个元素的nTime
enum { nMedianTimeSpan = 11 }; int64_t GetMedianTimePast() const { int64_t pmedian[nMedianTimeSpan]; int64_t *pbegin = &pmedian[nMedianTimeSpan]; int64_t *pend = &pmedian[nMedianTimeSpan]; const CBlockIndex *pindex = this; for (int i = 0; i < nMedianTimeSpan && pindex; i++, pindex = pindex->pprev) { *(--pbegin) = pindex->GetBlockTime(); } std::sort(pbegin, pend); return pbegin[(pend - pbegin) / 2]; }逻辑如下:
- 创建包含11个元素的数组,包括该区块和之前的10个区块
- pbegin、pend两个游标(数组游标)指向数组末端
- 遍历11个区块,pindex游标不断地向前移动
- 数组游标向前移动,并将pindex获取的时间戳赋值给数组
- 对数组排序(排序的原因是:区块时间戳是不可靠的字段,其大小与创建区块顺序可能不一致)
- 11个区块去中间的元素,也就是数组下标为5的元素,因为是奇数个元素,所以不用进行判断下标无效的问题
-
GetStateFor(...)函数在整个模块中至关重要,负责获取BIP9部署的状态信息。首先说明的是在一个目标周期之内,一个BIP9部署的状态是相同的,也就是说部署状态只会在难度目标发生改变之后才会更新。GetStateFor(...)函数获取的是上一个目标周期的最后一个区块的状态,如果该状态可以判断出部署状态则得出结果,并将结果保存在
VersionBitsCache结构体中;如果该状态已经存在于缓存中则直接返回结果;最后如果该区块无法得出状态信息,则会依次寻找(pindexPrev.nHeight - nPeriod)高度的状态信息,直到能够得出结果。如果直到nullptr也没有,则返回THRESHOLD_DEFINED。其中比较重要的是,如果一个区块表明该部署状态处于THRESHOLD_STARTED,则会进行更为详细的判断,以证明其状态是否以及失败或者可以进入LOCKED_IN阶段。ThresholdState AbstractThresholdConditionChecker::GetStateFor(...){ ... if (pindexPrev != nullptr) { pindexPrev = pindexPrev->GetAncestor( pindexPrev->nHeight - ((pindexPrev->nHeight + 1) % nPeriod)); } std::vectorvToCompute; while (cache.count(pindexPrev) == 0) { if (pindexPrev == nullptr) { cache[pindexPrev] = THRESHOLD_DEFINED; break; } if (pindexPrev->GetMedianTimePast() < nTimeStart) { cache[pindexPrev] = THRESHOLD_DEFINED; break; } vToCompute.push_back(pindexPrev); pindexPrev = pindexPrev->GetAncestor(pindexPrev->nHeight - nPeriod); } assert(cache.count(pindexPrev)); ThresholdState state = cache[pindexPrev]; while (!vToCompute.empty()) { ThresholdState stateNext = state; pindexPrev = vToCompute.back(); vToCompute.pop_back(); switch (state) { case THRESHOLD_DEFINED: { if (pindexPrev->GetMedianTimePast() >= nTimeTimeout) { stateNext = THRESHOLD_FAILED; } else if (pindexPrev->GetMedianTimePast() >= nTimeStart) { stateNext = THRESHOLD_STARTED; } break; } case THRESHOLD_STARTED: { if (pindexPrev->GetMedianTimePast() >= nTimeTimeout) { stateNext = THRESHOLD_FAILED; break; } const CBlockIndex *pindexCount = pindexPrev; int count = 0; for (int i = 0; i < nPeriod; i++) { if (Condition(pindexCount, params)) { count++; } pindexCount = pindexCount->pprev; } if (count >= nThreshold) { stateNext = THRESHOLD_LOCKED_IN; } break; } case THRESHOLD_LOCKED_IN: { stateNext = THRESHOLD_ACTIVE; break; } case THRESHOLD_FAILED: case THRESHOLD_ACTIVE: { break; } } cache[pindexPrev] = state = stateNext; } } 举例说明:
-
从0 -> 2015 -> 4031 -> 6047;
- 状态转换:
THRESHOLD_DEFINED->THRESHOLD_STARTED->THRESHOLD_LOCKED_IN->THRESHOLD_ACTIVE
- 状态转换:
-
bitcoin 中的版本检测按照
nMinerConfirmationWindow为一轮进行检测,在本轮之间的所有区块,都与本轮的第一个块状态相同。- 即 2015 -> 4030 之间所有块的状态,都与索引为2015 的块的部署状态相同。
-
示例:
- 针对某个 bit 位的部署,height( 0 -> 2014 )区块的所有状态都为THRESHOLD_DEFINED;
- 当父区块的高度为 2015 时(即当每次获取本轮第二个区块时,才会对本轮的第一个块的状态进行赋值,然后本轮所有块的时间都与本轮第一个块的状态相同),因为它不在全局缓存中,则进入条件,且它的MTP时间 >= startTime, 将该块的索引加入临时集合中,并将指针向前推至上一轮的初始块(此时这个块在集合中),进入接下来的条件执行。
- 遍历临时集合,因为上一轮的撞态为
THRESHOLD_DEFINED,且本轮初始块的时间 >= startTime,将本轮的状态转换为THRESHOLD_STARTED;
- 遍历临时集合,因为上一轮的撞态为
- 当父区块的高度为 4031(即当前的块为4032时),它不在全局缓存中,进入条件,且它的MTP时间 >= startTime,将该块的索引加入临时集合中,并将指针向前推至上一轮的初始块(此时这个块在集合中),进入接下来的条件执行。
- 遍历临时集合,因为上一轮的状态为
THRESHOLD_STARTED,且本轮初始块的时间 < timeout, 将统计上一轮部署该bit位的区块个数(即从 2016 ->4031),假设部署的个数超过阈值(95%),将本轮的状态转换为LOCKED_IN;
- 遍历临时集合,因为上一轮的状态为
- 当父区块的高度为 6047(即当前的块为6048时),它不在全局状态中,进入条件,且它的MTP时间 >= startTime,将该块的索引加入临时集合中,并将指针向前推至上一轮的初始块(此时这个块在集合中),进入接下来的条件执行。
- 遍历临时集合,因为上一轮的状态为
THRESHOLD_LOCKED_IN,将本轮的状态自动切换为THRESHOLD_ACTIVE。
- 遍历临时集合,因为上一轮的状态为
-
-
GetStateSinceHeightFor()函数获取本轮状态开始时的区块所在高度; 开始这个状态轮次的第二个区块的高度(因为每轮块的状态更新,都是当计算每轮第二个块时,才会去计算,然后把计算的结果缓存在全局缓存中;因为所有块的状态都是根据它的父区块确定的);
int AbstractThresholdConditionChecker::GetStateSinceHeightFor( const CBlockIndex *pindexPrev, const Consensus::Params ¶ms, ThresholdConditionCache &cache) const { const ThresholdState initialState = GetStateFor(pindexPrev, params, cache); // BIP 9 about state DEFINED: "The genesis block is by definition in this if (initialState == THRESHOLD_DEFINED) { return 0; } const int nPeriod = Period(params); pindexPrev = pindexPrev->GetAncestor(pindexPrev->nHeight - ((pindexPrev->nHeight + 1) % nPeriod)); const CBlockIndex *previousPeriodParent = pindexPrev->GetAncestor(pindexPrev->nHeight - nPeriod); while (previousPeriodParent != nullptr && GetStateFor(previousPeriodParent, params, cache) == initialState) { pindexPrev = previousPeriodParent; previousPeriodParent = pindexPrev->GetAncestor(pindexPrev->nHeight - nPeriod); } // Adjust the result because right now we point to the parent block. return pindexPrev->nHeight + 1; }逻辑如下:
- 获取本轮的块的状态, 如果为
THRESHOLD_DEFINED直接返回0 - 获取本目标周期的初始块和上一目标周期的初始块
- 当上一轮的初始块不为NULL,并且状态与本轮状态相同时,进入循环逻辑
- 如果其状态与当前状态相同则向上一个目标周期寻找
- 当状态某个轮次的状态与本轮的状态不同时,退出上述循环,然后返回这种状态开始时的高度
- 获取本轮的块的状态, 如果为
本文由Copernicus团队 戚帅、姚永芯写作,转载无需授权