ROS机器人操作系统(roscpp)
1. Client Library与roscpp
1.1 Client Library简介
ROS为机器人开发者们提供了不同语言的编程接口,比如C++接口叫做roscpp,Python接口叫做rospy,Java接口叫做rosjava。尽管语言不通,但这些接口都可以用来创建topic、service、param,实现ROS的通信功能。Clinet Lirary有点类似开发中的Helper Class,把一些常用的基本功能做了封装。
目前ROS支持的Clinet Library包括:
| Client Library | 介绍 |
|---|---|
| roscpp | ROS的C++库,是目前最广泛应用的ROS客户端库,执行效率高 |
| rospy | ROS的Python库,开发效率高,通常用在对运行时间没有太大要求的场合,例如配置、初始化等操作 |
| roslisp | ROS的LISP库 |
| roscs | Mono/.NET.库,可用任何Mono/.NET语言,包括C#,Iron Python, Iron Ruby等 |
| rosgo | ROS Go语言库 |
| rosjava | ROS Java语言库 |
| rosnodejs | Javascript客户端库 |
| … | … |
目前最常用的只有roscpp和rospy,而其余的语言版本基本都还是测试版。
从开发客户端库的角度看,一个客户端库,至少需要能够包括master注册、名称管理、消息收发等功能。这样才能给开发者提供对ROS通信架构进行配置的方法。
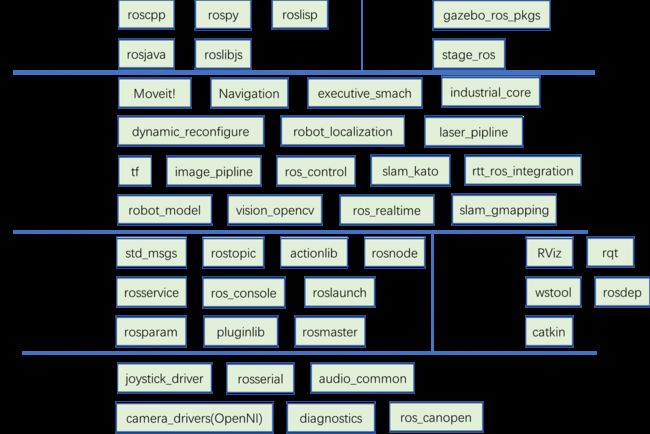
整个ROS包括的packages如下,你可以看到roscpp、rospy处于什么位置。
1.2 roscpp
roscpp位于/opt/ros/kinetic之下,用C++实现了ROS通信。在ROS中,C++的代码是通过catkin这个编译系统(扩展的CMake)来进行编译构建的。所以简单地理解,你也可以把roscpp就当作为一个C++的库,我们创建一个CMake工程,在其中include了roscpp等ROS的libraries,这样就可以在工程中使用ROS提供的函数了。
通常我们要调用ROS的C++接口,首先就需要#include 。
roscpp的主要部分包括:
- ros::init() : 解析传入的ROS参数,创建node第一步需要用到的函数
- ros::NodeHandle : 和topic、service、param等交互的公共接口
- ros::master : 包含从master查询信息的函数
- ros::this_node:包含查询这个进程(node)的函数
- ros::service:包含查询服务的函数
- ros::param:包含查询参数服务器的函数,而不需要用到NodeHandle
- ros::names:包含处理ROS图资源名称的函数
具体可见:http://docs.ros.org/api/roscpp/html/index.html
以上功能可以分为以下几类:
- Initialization and Shutdown 初始与关闭
- Topics 话题
- Services 服务
- Parameter Server 参数服务器
- Timers 定时器
- NodeHandles 节点句柄
- Callbacks and Spinning 回调和自旋(或者翻译叫轮询?)
- Logging 日志
- Names and Node Information 名称管理
- Time 时钟
- Exception 异常
看到这么多接口,千万别觉得复杂,我们日常开发并不会用到所有的功能,你只需对要有一些印象,掌握几个比较常见和重要的用法就足够了。下面我们来介绍关键的用法。
2. 节点初始、关闭以及NodeHandle
当执行一个ROS程序,就被加载到了内存中,就成为了一个进程,在ROS里叫做节点。每一个ROS的节点尽管功能不同,但都有必不可少的一些步骤,比如初始化、销毁,需要通行的场景通常都还需要节点的句柄。 这一节我们来学习Node最基本的一些操作。
2.1 初始化节点
对于一个C++写的ROS程序,之所以它区别于普通C++程序,是因为代码中做了两层工作:
- 调用了
ros::init()函数,从而初始化节点的名称和其他信息,一般我们ROS程序一开始都会以这种方式开始。 - 创建
ros::NodeHandle对象,也就是节点的句柄,它可以用来创建Publisher、Subscriber以及做其他事情。
句柄(Handle)这个概念可以理解为一个“把手”,你握住了门把手,就可以很容易把整扇门拉开,而不必关心门是什么样子。NodeHandle就是对节点资源的描述,有了它你就可以操作这个节点了,比如为程序提供服务、监听某个topic上的消息、访问和修改param等等。
2.2 关闭节点
通常我们要关闭一个节点可以直接在终端上按Ctrl+C,系统会自动触发SIGINT句柄来关闭这个进程。 你也可以通过调用ros::shutdown()来手动关闭节点,但通常我们很少这样做。
以下是一个节点初始化、关闭的例子。
#include
int main(int argc, char** argv)
{
ros::init(argc, argv, "your_node_name");
ros::NodeHandle nh;
//....节点功能
//....
ros::spin();//用于触发topic、service的响应队列
return 0;
}
这段代码是最常见的一个ROS程序的执行步骤,通常要启动节点,获取句柄,而关闭的工作系统自动帮我们完成,如果有特殊需要你也可以自定义。你可能很关心句柄可以用来做些什么,接下来我们来看看NodeHandle常用的成员函数。
2.3 NodeHandle常用成员函数
NodeHandle是Node的句柄,用来对当前节点进行各种操作。在ROS中,NodeHandle是一个定义好的类,通过include,我们可以创建这个类,以及使用它的成员函数。
NodeHandle常用成员函数包括:
//创建话题的publisher
ros::Publisher advertise(const string &topic, uint32_t queue_size, bool latch=false);
//第一个参数为发布话题的名称
//第二个是消息队列的最大长度,如果发布的消息超过这个长度而没有被接收,那么就的消息就会出队。通常设为一个较小的数即可。
//第三个参数是是否锁存。某些话题并不是会以某个频率发布,比如/map这个topic,只有在初次订阅或者地图更新这两种情况下,/map才会发布消息。这里就用到了锁存。
//创建话题的subscriber
ros::Subscriber subscribe(const string &topic, uint32_t queue_size, void(*)(M));
//第一个参数是订阅话题的名称
//第二个参数是订阅队列的长度,如果受到的消息都没来得及处理,那么新消息入队,就消息就会出队
//第三个参数是回调函数指针,指向回调函数来处理接收到的消息
//创建服务的server,提供服务
ros::ServiceServer advertiseService(const string &service, bool(*srv_func)(Mreq &, Mres &));
//第一个参数是service名称
//第二个参数是服务函数的指针,指向服务函数。指向的函数应该有两个参数,分别接受请求和响应。
//创建服务的client
ros::ServiceClient serviceClient(const string &service_name, bool persistent=false);
//第一个函数式service名称
//第二个参数用于设置服务的连接是否持续,如果为true,client将会保持与远程主机的连接,这样后续的请求会快一些。通常我们设为flase
//查询某个参数的值
bool getParam(const string &key, std::string &s);
bool getParam (const std::string &key, double &d) const;
bool getParam (const std::string &key, int &i) const;
//从参数服务器上获取key对应的值,已重载了多个类型
//给参数赋值
void setParam (const std::string &key, const std::string &s) const;
void setParam (const std::string &key, const char *s) const;
void setParam (const std::string &key, int i) const;
//给key对应的val赋值,重载了多个类型的val
3. topic in roscpp
3.1 Topic通信
Topic是ROS里一种异步通信的模型,一般是节点间分工明确,有的只负责发送,有的只负责接收处理。对于绝大多数的机器人应用场景,比如传感器数据收发,速度控制指令的收发,Topic模型是最适合的通信方式。
为了讲明白topic通信的编程思路,我们首先来看topic_demo中的代码,这个程序是一个消息收发的例子:自定义一个类型为gps的消息(包括位置x,y和工作状态state信息),一个node以一定频率发布模拟的gps消息,另一个node接收并处理,算出到原点的距离。 源代码见ROS-Academy-for-Beginners/topic_demo
3.2 创建gps消息
在代码中,我们会用到自定义类型的gps消息,因此就需要来自定义gps消息,在msg路径下创建gps.msg: 见topic_demo/msg/gps.msg
string state #工作状态
float32 x #x坐标
float32 y #y坐标
以上就定义了一个gps类型的消息,你可以把它理解成一个C语言中的结构体,类似于
struct gps
{
string state;
float32 x;
float32 y;
}
在程序中对一个gps消息进行创建修改的方法和对结构体的操作一样。
当你创建完了msg文件,记得修改CMakeLists.txt和package.xml,从而让系统能够编译自定义消息。 在CMakeLists.txt中需要改动
find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
message_generation #需要添加的地方
)
add_message_files(FILES gps.msg)
#catkin在cmake之上新增的命令,指定从哪个消息文件生成
generate_messages(DEPENDENCIES std_msgs)
#catkin新增的命令,用于生成消息
#DEPENDENCIES后面指定生成msg需要依赖其他什么消息,由于gps.msg用到了flaot32这种ROS标准消息,因此需要再把std_msgs作为依赖
package.xml中需要的改动
<build_depend>message_generationbuild_depend>
<run_depend>message_runtimerun_depend>
当你完成了以上所有工作,就可以回到工作空间,然后编译了。编译完成之后会在devel路径下生成gps.msg对应的头文件,头文件按照C++的语法规则定义了topic_demo::gps类型的数据。
要在代码中使用自定义消息类型,只要#include ,然后声明,按照对结构体操作的方式修改内容即可。
topic_demo::gps mygpsmsg;
mygpsmsg.x = 1.6;
mygpsmsg.y = 5.5;
mygpsmsg.state = "working";
3.3 消息发布节点
定义完了消息,就可以开始写ROS代码了。通常我们会把消息收发的两端分成两个节点来写,一个节点就是一个完整的C++程序。
见topic_demo/src/talker.cpp
#include 机器人上几乎所有的传感器,几乎都是按照固定频率发布消息这种通信方式来传输数据,只是发布频率和数据类型的区别。
3.4 消息接收节点
见topic_demo/src/listener.cpp
#include 在topic接收方,有一个比较重要的概念,就是回调(CallBack),在本例中,回调就是预先给gps_info话题传来的消息准备一个回调函数,你事先定义好回调函数的操作,本例中是计算到原点的距离。只有当有消息来时,回调函数才会被触发执行。具体去触发的命令就是ros::spin(),它会反复的查看有没有消息来,如果有就会让回调函数去处理。
因此千万不要认为,只要指定了回调函数,系统就回去自动触发,你必须ros::spin()或者ros::spinOnce()才能真正使回调函数生效。
3.5 CMakeLists.txt文件修改
在CMakeLists.txt添加以下内容,生成可执行文件
add_executable(talker src/talker.cpp) #生成可执行文件talker
add_dependencies(talker topic_demo_generate_messages_cpp)
#表明在编译talker前,必须先生编译完成自定义消息
#必须添加add_dependencies,否则找不到自定义的msg产生的头文件
#表明在编译talker前,必须先生编译完成自定义消息
target_link_libraries(talker ${catkin_LIBRARIES}) #链接
add_executable(listener src/listener.cpp ) #声称可执行文件listener
add_dependencies(listener topic_demo_generate_messages_cpp)
target_link_libraries(listener ${catkin_LIBRARIES})#链接
以上cmake语句告诉catkin编译系统如何去编译生成我们的程序。这些命令都是标准的cmake命令,如果不理解,请查阅cmake教程。
之后经过catkin_make,一个自定义消息+发布接收的基本模型就完成了。
扩展:回调函数与spin()方法
回调函数在编程中是一种重要的方法,在维基百科上的解释是:
In computer programming, a callback is any executable code that is passed as an argument to other code, which is expected to call back (execute) the argument at a given time.
回调函数作为参数被传入到了另一个函数中(在本例中传递的是函数指针),在未来某个时刻(当有新的message到达),就会立即执行。Subscriber接收到消息,实际上是先把消息放到一个队列中去,如图所示。队列的长度在Subscriber构建的时候设置好了。当有spin函数执行,就会去处理消息队列中队首的消息。

spin具体处理的方法又可分为阻塞/非阻塞,单线程/多线程,在ROS函数接口层面我们有4种spin的方式:
| spin方法 | 阻塞 | 线程 |
|---|---|---|
ros::spin() |
阻塞 | 单线程 |
ros::spinOnce() |
非阻塞 | 单线程 |
ros::MultiThreadedSpin() |
阻塞 | 多线程 |
ros::AsyncMultiThreadedSpin() |
非阻塞 | 多线程 |
阻塞与非阻塞的区别我们已经讲了,下面来看看单线程与多线程的区别:

我们常用的spin()、spinOnce()是单个线程逐个处理回调队列里的数据。有些场合需要用到多线程分别处理,则可以用到MultiThreadedSpin()、AsyncMultiThreadedSpin()。
4. service in roscpp
4.1 Service通信
Service是一种请求-反馈的通信机制。请求的一方通常被称为客户端,提供服务的一方叫做服务器端。Service机制相比于Topic的不同之处在于:
- 消息的传输是双向的,有反馈的,而不是单一的流向。
- 消息往往不会以固定频率传输,不连续,而是在需要时才会向服务器发起请求。
在ROS中如何请求或者提供一个服务,我们来看service_demo的代码:一个节点发出服务请求(姓名,年龄),另一个节点进行服务响应,答复请求。
4.2 创建Greeting服务
创建service_demo/Greeting.srv文件,内容包括:
string name #短横线上边部分是服务请求的数据
int32 age
--- #短横线下面是服务回传的内容。
string feedback
srv格式的文件创建后,也需要修改CMakeLissts.txt,在其中加入
add_service_files(FILES Greeting.srv)
其余与添加msg的改动一样。然后进行catkin_make,系统就会生成在代码中可用的Greeting类型。在代码中使用,只需要#include ,然后即可创建该类型的srv。
service_demo::Greeting grt; //grt分为grt.request和grt.response两部分
grt.request.name = "HAN"; //不能用grt.name或者grt.age来访问
grt.request.age = "20";
...
新生成的Greeting类型的服务,其结构体的风格更为明显,可以这么理解,一个Greeting服务结构体中嵌套了两个结构体,分别是请求和响应:
struct Greeting
{
struct Request
{
string name;
int age;
}request;
struct Response
{
string feedback;
}response;
}
4.3 创建提供服务节点(server)
service_demo/srv/server.cpp内容如下:
#include 在以上代码中,服务的处理操作都写在handle_function()中,它的输入参数就是Greeting的Request和Response两部分,而非整个Greeting对象。通常在处理函数中,我们对Requst数据进行需要的操作,将结果写入到Response中。在roscpp中,处理函数返回值是bool型,也就是服务是否成功执行。不要理解成输入Request,返回Response,在rospy中是这样的。
4.4 创建服务请求节点(client)
service_demo/srv/client.cpp内容如下:
# include "ros/ros.h"
# include "service_demo/Greeting.h"
int main(int argc, char **argv)
{
ros::init(argc, argv, "greetings_client");// 初始化,节点命名为"greetings_client"
ros::NodeHandle nh;
ros::ServiceClient client = nh.serviceClient<service_demo::Greeting>("greetings");
// 定义service客户端,service名字为“greetings”,service类型为Service_demo
// 实例化srv,设置其request消息的内容,这里request包含两个变量,name和age,见Greeting.srv
service_demo::Greeting srv;
srv.request.name = "HAN";
srv.request.age = 20;
if (client.call(srv))
{
// 注意我们的response部分中的内容只包含一个变量response,另,注意将其转变成字符串
ROS_INFO("Response from server: %s", srv.response.feedback.c_str());
}
else
{
ROS_ERROR("Failed to call service Service_demo");
return 1;
}
return 0;
}
以上代码比较关键的地方有两处,一个是建立一个ServiceClient,另一个是开始调用服务。建立client需要用nh.serviceClient,指明服务的类型和服务的名称。而调用时可以直接用client.call(srv),返回结果不是response,而是是否成功调用远程服务。
CMakeLists.txt和pacakge.xml修改方法和topic_demo修改方法类似,不再赘述。
5. param in roscpp
5.1 Parameter Server
严格来说,param并不能称作一种通信方式,因为它往往只是用来存储一些静态的设置,而不是动态变化的。所以关于param的操作非常轻巧,非常简单。 关于param的API,roscpp为我们提供了两套,一套是放在ros::paramnamespace下,另一套是在ros::NodeHandle下,这两套API的操作完全一样,用哪一个取决于你的习惯。
5.2 param_demo
我们来看看在C++中如何进行param_demo的操作,param_demo/param.cpp文件,内容包括:
#include以上是roscpp中对param进行增删改查所有操作的方法,非常直观。
5.3 param_demo中的launch文件
实际项目中我们对参数进行设置,尤其是添加参数,一般都不是在程序中,而是在launch文件中。因为launch文件可以方便的修改参数,而写成代码之后,修改参数必须重新编译。 因此我们会在launch文件中将param都定义好,比如这个demo正确的打开方式应该是roslaunch param_demo param_demo_cpp.launch
param_demo/launch/param_demo_cpp.launch内容为:
<launch>
<param name="param1" value="1" />
<param name="param2" value="2" />
<rosparam>
param3: 3
param4: 4
param5: 5
rosparam>
<node pkg="param_demo" type="param_demo" name="param_demo" output="screen" />
launch>
通过和两个标签我们设置好了5个param,从而在之前的代码中进行增删改查的操作。