提要
本文先介绍光线追踪的理论,然后着重一步一步来搭建渲染场景,从最基本的向量类开始.采用的语言是c++,利用面向对象的思想,一些基础的线性代数和空间几何的知识也会用到,编程的框架用的是GLFW,渲染用到的是OpenGL。
原理
光线追踪,简单地说,就是从摄影机的位置,通过影像平面上的像素位置(比较正确的说法是取样(sampling)位置),发射一束光线到场景,求光线和几何图形间最近的交点,再求该交点的著色。如果该交点的材质是反射性的,可以在该交点向反射方向继续追踪。光线追踪除了容易支持一些全局光照效果外,亦不局限于三角形作为几何图形的单位。任何几何图形,能与一束光线计算交点(intersection point),就能支持。
示意图如下:

光线追踪有一些很棒的特性,比如:能够生成高度真实感的图形,特别是对于表面光滑的对象,缺点是所需的计算量大的惊人.
原理其实非常的简单,但具体实现起来的时候会有很多细节的地方.
代码实现
向量类
可以表示空上的点(x,y,z).
gvector3.h
#ifndef GVECTOR3_H
#define GVECTOR3_H
#include
#include
#define MIN(x,y) (x)>(y)?(y):(x);
#define MAX(x,y) (x)>(y)?(x):(y);
using namespace std;
class GVector3
{
public:
float x;
float y;
float z;
// 缺省构造函数
GVector3();
~GVector3();
// 用户构造函数
GVector3(float posX, float posY, float posZ);
//输出向量信息
void getInfo();
//矢量加法
GVector3 operator+(GVector3 v);
//矢量减法
GVector3 operator-(GVector3 v);
//数乘
GVector3 operator*(float n);
//数除
GVector3 operator/(float n);
//向量点积
float dotMul(GVector3 v2);
//向量叉乘
GVector3 crossMul(GVector3 v2);
//绝对值化
GVector3 abs();
//获取分量中的最大值
float max();
//获取分量的最小值
float min();
//获取矢量长度
float getLength();
//向量单位化
GVector3 normalize();
//求两点之间的距离
float getDist(GVector3 v);
//返回零向量
static inline GVector3 zero(){ return GVector3(0,0,0); }
//打印向量的分量值
void show();
};
#endif // GVECTOR3_H
gvector3.cpp
#include "gvector3.h"
GVector3::GVector3()
{
}
GVector3::~GVector3()
{
}
GVector3::GVector3(float posX, float posY, float posZ)
{
x=posX;
y=posY;
z=posZ;
}
GVector3 GVector3::operator+(GVector3 v)
{
return GVector3(x+v.x,v.y+y,v.z+z);
}
GVector3 GVector3::operator-(GVector3 v)
{
return GVector3(x-v.x,y-v.y,z-v.z);
}
GVector3 GVector3::operator*(float n)
{
return GVector3(x*n,y*n,z*n);
}
GVector3 GVector3::operator/(float n)
{
return GVector3(x/n,y/n,z/n);
}
void GVector3::getInfo()
{
cout<<"x:"<
着重解释一下向量的点乘和叉乘。
点乘,也叫向量的内积、数量积。顾名思义,求下来的结果是一个数。
在物理学中,已知力与位移求功,实际上就是求向量F与向量s的内积,即要用点乘。
叉乘,也叫向量的外积、向量积。顾名思义,求下来的结果是一个向量,记这个向量为c。
向量c的方向与a,b所在的平面垂直,且方向要用“右手法则”判断(用右手的四指先表示向量a的方向,然后手指朝着手心的方向摆动到向量b的方向,大拇指所指的方向就是向量c的方向)。
在物理学中,已知力与力臂求力矩,就是向量的外积,即叉乘。
数值上的计算,将向量用坐标表示(三维向量),
若向量a=(a1,b1,c1),向量b=(a2,b2,c2),
则
向量a·向量b=a1a2+b1b2+c1c2
向量a×向量b=
| i j k|
|a1 b1 c1|
|a2 b2 c2|
=(b1c2-b2c1,c1a2-a1c2,a1b2-a2b1)
(i、j、k分别为空间中相互垂直的三条坐标轴的单位向量)。
光线类
首先来看一下光线的表示方法。
当t=0时,p=e, 当t=1时,p=s.0
这个结论在求交的时候会用到。
有两个私有成员,原点和方向,数学上可用参数函数来表示:r(t)=o+td;t>=0cray.h
#ifndef CRAY_H
#define CRAY_H
#include
#include "gvector3.h"
#define PI 3.14159
using namespace std;
class CRay
{
private:
GVector3 origin;
GVector3 direction;
public:
CRay();
CRay(GVector3 o,GVector3 d);
~CRay();
void setOrigin(GVector3 o);
void setDirection(GVector3 d);
GVector3 getOrigin();
GVector3 getDirection();
//通过向射线的参数方程传入参数t而获得在射线上的点
GVector3 getPoint(double t);
};
#endif
cray.cpp
#include "cray.h"
CRay::CRay()
{
}
CRay::~CRay()
{
}
CRay::CRay(GVector3 o,GVector3 d)
{
origin=o;
direction=d;
}
void CRay::setDirection(GVector3 d)
{
direction=d;
}
void CRay::setOrigin(GVector3 o)
{
origin=o;
}
GVector3 CRay::getDirection()
{
return direction;
}
GVector3 CRay::getOrigin()
{
return origin;
}
GVector3 CRay::getPoint(double t)
{
return origin+direction*t;
}
初试画板
这里用GLFW作为opengl的编程框架。
GLFW是一个自由,开源,多平台的图形库,可用于创建窗口,渲染OpenGL,管理输入。
GLFW的配置见《 GLFW入门学习》.这里主要要做的就是将我们窗口映射成像素的点阵,然后填充颜色。
#include
#include
#include
#define WINDOW_WIDTH 600
#define WINDOW_HEIGHT 600
void initScene(int w,int h)
{
// 启用阴影平滑
glShadeModel( GL_SMOOTH );
// 黑色背景
glClearColor( 0.0, 0.0, 0.0, 0.0 );
// 设置深度缓存
glClearDepth( 1.0 );
// 启用深度测试
glEnable( GL_DEPTH_TEST );
// 所作深度测试的类型
glDepthFunc( GL_LEQUAL );
// 告诉系统对透视进行修正
glHint( GL_PERSPECTIVE_CORRECTION_HINT, GL_NICEST );
}
//这里进行所有的绘图工作
void drawScene() {
float colorSpan=0.0005f;
float color=0.0f;
float pixelSize=2.0f;
float posY=-1.0f;
float posX=-1.0f;
long maxDepth=20;
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glLoadIdentity();
//将原点移动到左下角
glTranslatef(-0.5f,-0.5f,-1.0f);
glPointSize(2.0);
glBegin(GL_POINTS);
double dx=1.0f/WINDOW_WIDTH;
double dy=1.0f/WINDOW_HEIGHT;
float dD=255.0f/maxDepth;
glBegin(GL_POINTS);
for (long y = 0; y < WINDOW_HEIGHT; ++y)
{
double sy = 1-dy*y;
for (long x = 0; x < WINDOW_WIDTH; ++x)
{
double sx =dx*x;
float colorR=x*1.0/WINDOW_WIDTH*255;
float colorB=y*1.0/WINDOW_HEIGHT*255;
glColor3ub(colorR,0,colorB);
glVertex2f(sx,sy);
}
}
// 交换缓冲区
glfwSwapBuffers();
}
//重置窗口大小后的回调函数
void GLFWCALL resizeGL(int width, int height )
{
// 防止窗口大小变为0
if ( height == 0 )
{
height = 1;
}
// 重置当前的视口
glViewport( 0, 0, (GLint)width, (GLint)height );
// 选择投影矩阵
glMatrixMode( GL_PROJECTION );
// 重置投影矩阵
glLoadIdentity();
// 设置视口的大小
gluPerspective( 45.0, (GLfloat)width/(GLfloat)height, 0.1, 100.0 );
// 选择模型观察矩阵
glMatrixMode( GL_MODELVIEW );
glLoadIdentity();
}
int main( void )
{
//记录程序运行状态
int running = GL_TRUE;
//初始化 GLFW
if( !glfwInit() )
{
exit( EXIT_FAILURE );
}
// 创建一个OpenGL 窗口
if( !glfwOpenWindow( WINDOW_WIDTH,WINDOW_HEIGHT,6,6,6,0,32,0,GLFW_WINDOW) )
{
glfwTerminate();
exit( EXIT_FAILURE );
}
//初始化OpenGL窗口
initScene(WINDOW_WIDTH, WINDOW_HEIGHT);
//设置窗口大小发生变化时的回调函数
glfwSetWindowSizeCallback(resizeGL);
//主循环
while( running )
{
// OpenGL rendering goes here...
glClear( GL_COLOR_BUFFER_BIT );
// 当按下ESC键的时候触发
running = !glfwGetKey( GLFW_KEY_ESC ) &&glfwGetWindowParam( GLFW_OPENED );
drawScene();
//延时0.05秒
glfwSleep(0.05 );
}
glfwTerminate();
//退出程序
exit( EXIT_SUCCESS );
}
渲染结果:

球体
球面的几何定义是到空间某点距离一定的点的集合。
这里着重需要说明的是球体的isIntersected函数,用于求光线是否与球体相交,并将结果存在result中返回。
中心点为c、半径为r的球体表面可用等式(equation)表示:||x-c||=r
只要把x=r(t)带入,求解即可得交点。具体的运算过程如下(令v=o-c)。


若根号内为负数,即相交不发生。另外,由于这里只需要取最近的交点,因此正负号只需取负号。
而球体在交点的法向量可表示为n=(p - c),单位法向量为(p - c)/R
所以空间球体可以用两个参数来表示:圆心位置和半径。
代码如下。
csphere.h
#ifndef CSPHERE_H
#define CSPHERE_H
#include "gvector3.h"
#include "intersectresult.h"
#include "cray.h"
class CSphere
{
public:
CSphere();
CSphere(GVector3 center,double radius);
CSphere(CSphere& s);
void setCenter(GVector3& c);
void setRadius(double r);
GVector3 getCenter();
double getRadius();
//获取物体表面一点的法线
virtual GVector3 getNormal(GVector3 point);
//用于判断射线和该物体的交点
virtual IntersectResult isIntersected(CRay RAY);
virtual ~CSphere();
protected:
private:
GVector3 center;
double radius;
};
#endif // CSPHERE_H
csphere.cpp
#include "csphere.h"
#include "intersectresult.h"
CSphere::CSphere()
{
//ctor
}
CSphere::CSphere(GVector3 c,double r)
{
center=c;
radius=r;
}
CSphere::CSphere(CSphere& s)
{
center=s.getCenter();
radius=s.getRadius();
}
CSphere::~CSphere()
{
//dtor
}
void CSphere::setCenter(GVector3& c)
{
center=c;
}
void CSphere::setRadius(double r)
{
radius=r;
}
GVector3 CSphere::getCenter()
{
return center;
}
double CSphere::getRadius()
{
return radius;
}
GVector3 CSphere::getNormal(GVector3 p)
{
return p-center;
}
IntersectResult CSphere::isIntersected(CRay _ray)
{
IntersectResult result = IntersectResult::noHit();
GVector3 v = _ray.getOrigin() - center;
float a0 = v.dotMul(v) - radius*radius;
float DdotV = _ray.getDirection().dotMul(v);
if (DdotV <= 0) {
float discr = DdotV * DdotV - a0;
if (discr >= 0) {
//
result.isHit=1;
result.distance=-DdotV - sqrt(discr);
result.position=_ray.getPoint(result.distance);
result.normal = result.position-center;
result.normal.normalize();
}
}
return result;
}
还有一个结构体,用来表示体和光线相交的结果。
#ifndef INTERSECTRESULT_H_INCLUDED
#define INTERSECTRESULT_H_INCLUDED
#include "gvector3.h"
struct IntersectResult{
float distance;
bool isHit;
GVector3 position;
GVector3 normal;
static inline IntersectResult noHit() { return IntersectResult(); }
};
#endif // INTERSECTRESULT_H_INCLUDED
摄像机
摄影机在光线追踪系统里,负责把影像的取样位置,生成一束光线。
由于影像的大小是可变的(多少像素宽x多少像素高),为方便计算,这里设定一个统一的取样座标(sx, sy),以左下角为(0,0),右上角为(1 ,1)。
从数学角度来说,摄影机透过投影(projection),把三维空间投射到二维空间上。常见的投影有正投影(orthographic projection)、透视投影(perspective projection)等等。这里首先实现透视投影。
透视摄影机比较像肉眼和真实摄影机的原理,能表现远小近大的观察方式。透视投影从视点(view point/eye position),向某个方向观察场景,观察的角度范围称为视野(field of view, FOV)。除了定义观察的向前(forward)是那个方向,还需要定义在影像平面中,何谓上下和左右。为简单起见,暂时不考虑宽高不同的影像,FOV同时代表水平和垂直方向的视野角度。
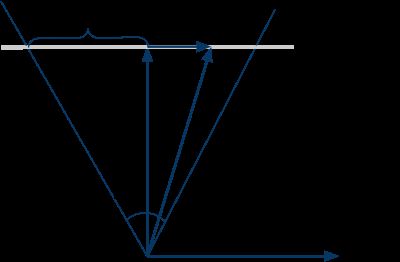
上图显示,从摄影机上方显示的几个参数。 forward和right分别是向前和向右的单位向量。
因为视点是固定的,光线的起点不变。要生成光线,只须用取样座标(sx, sy)计算其方向d。留意FOV和s的关系为:tan(fov/2).
把sx从[0, 1]映射到[-1,1],就可以用right向量和s,来计算r向量。
代码实现:
perspectiveCamera.h
#ifndef PERSPECTIVECAMERA_H
#define PERSPECTIVECAMERA_H
#include "cray.h"
class perspectiveCamera{
public:
perspectiveCamera();
~perspectiveCamera();
perspectiveCamera(const GVector3& _eye,const GVector3& _front,const GVector3& _refUp,float _fov);
CRay generateRay(float x,float y);
private:
GVector3 eye;
GVector3 front;
GVector3 refUp;
float fov;
GVector3 right;
GVector3 up;
float fovScale;
};
#endif
perspectiveCamera.cpp
#include"perspectiveCamera.h"
perspectiveCamera::perspectiveCamera()
{
}
perspectiveCamera::~perspectiveCamera()
{
}
perspectiveCamera::perspectiveCamera(const GVector3& _eye,const GVector3& _front,const GVector3& _refUp,float _fov)
{
eye=_eye;
front=_front;
refUp=_refUp;
fov=_fov;
right=front.crossMul(refUp);
up = right.crossMul(front);
fovScale = tan(fov* (PI * 0.5f / 180)) * 2;
}
CRay perspectiveCamera::generateRay(float x,float y)
{
GVector3 r = right*((x - 0.5f) * fovScale);
GVector3 u = up*((y - 0.5f) * fovScale);
GVector3 tmp=front+r+u;
tmp.normalize();
return CRay(eye,tmp);
}
渲染一个球
基本的工具类都准备好之后,我们就可以开始渲染一些东西,这里先把之前定义的球体渲染到窗口之中。
基本的做法是遍历影像的取样座标(sx, sy),用Camera把(sx, sy)转为Ray3,和场景(例如Sphere)计算最近交点,把该交点的属性转为颜色,写入影像的相对位置里。
首先我们来渲染深度,深度(depth)就是从IntersectResult取得最近相交点的距离,因深度的范围是从零至无限,为了把它显示出来,可以把它的一个区间映射到灰阶。这里用[0, maxDepth]映射至[255, 0],即深度0的像素为白色,深度达maxDepth的像素为黑色。
代码实现:
void renderDepth()
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glLoadIdentity(); // Reset The View
glTranslatef(-0.5f,-0.5f,-1.0f);
glPointSize(2.0);
float horiz=0.0;
float dep=10;
PerspectiveCamera camera( GVector3(horiz, 10, dep),GVector3(0, 0, -1),GVector3(0, 1, 0), 90);
long maxDepth=18;
CSphere* sphere1 = new CSphere(GVector3(0, 10, -10), 10.0);
float dx=1.0f/WINDOW_WIDTH;
float dy=1.0f/WINDOW_HEIGHT;
float dD=255.0f/maxDepth;
glBegin(GL_POINTS);
for (long y = 0; y < WINDOW_HEIGHT; ++y)
{
float sy = 1 - dy*y;
for (long x = 0; x < WINDOW_WIDTH; ++x)
{
float sx =dx*x;
CRay ray(camera.generateRay(sx, sy));
IntersectResult result = sphere1->isIntersected(ray);
if (result.isHit)
{
double t=MIN(result.distance*dD,255.0f);
int depth = (int)(255 -t);
glColor3ub(depth,depth,depth);
glVertex2f(sx,sy);
}
}
}
glEnd();
// 交换缓冲区
glfwSwapBuffers();
}
渲染结果
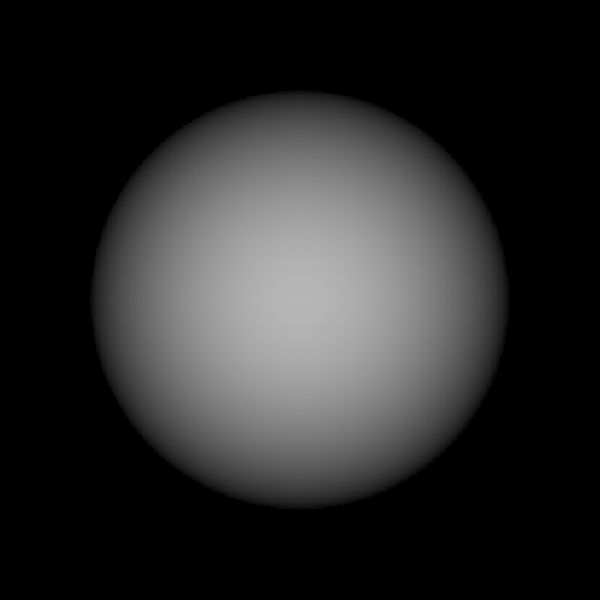
接下来我们来渲染一下交点法向量,法向量是一个单位向量,在计算交点的时候们就将其存储在result.normal中了,其每个元素的范围是[-1, 1]。把单位向量映射到颜色的常用方法为,把(x, y, z)映射至(r, g, b),范围从[-1, 1]映射至[0, 255]。
代码实现:
void renderDepth()
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glLoadIdentity(); // Reset The View
glTranslatef(-0.5f,-0.5f,-1.0f);
glPointSize(2.0);
PerspectiveCamera camera( GVector3(0, 10, 10),GVector3(0, 0, -1),GVector3(0, 1, 0), 90);
long maxDepth=20;
CSphere* sphere1 = new CSphere(GVector3(0, 10, -10), 10.0);
camera.initialize();
float dx=1.0f/WINDOW_WIDTH;
float dy=1.0f/WINDOW_HEIGHT;
float dD=255.0f/maxDepth;
glBegin(GL_POINTS);
for (long y = 0; y < WINDOW_HEIGHT; ++y)
{
float sy = 1 - dy*y;
for (long x = 0; x < WINDOW_WIDTH; ++x)
{
float sx =dx*x;
CRay ray(camera.generateRay(sx, sy));
IntersectResult result = sphere1->isIntersected(ray);
if (result.isHit)
{
//double t=MIN(result.distance*dD,255.0f);
//int depth = (int)(255 -t);
//xuanranshengdu
//glColor3ub(depth,depth,depth);
//xuanran normal
glColor3ub(128*(result.normal.x+1),128*(result.normal.y+1),128*(result.normal.z+1));
glVertex2f(sx,sy);
}
}
}
glEnd();
// 交换缓冲区
glfwSwapBuffers();
}
渲染结果:

球体上方的法向量是接近(0, 1, 0),所以是浅绿色(0.5, 1, 0.5)。
结语
入门篇就先到这里,通过一步步搭建我们的场景,对光线追踪有了一个基础的理解,
接下来我们会一步步深入一些高级的主题,比如材质,光照,雾...
参考:
用JavaScript玩转计算机图形学(一)光线追踪入门-http://www.cnblogs.com/miloyip/archive/2010/03/29/1698953.html
光线追踪技术的理论和实践(面向对象)-http://blog.csdn.net/zhangci226/article/details/5664313
Wikipedia, Ray Tracing
计算机图形学(第三版)(美)赫恩 著,(美)巴克 著。