优达学城无人驾驶工程师——P1寻找车道线
这次介绍的是优达学城的无人驾驶工程师的P1项目,利用车的前摄像头来识别当前车道的左右两边两条的车道线。测试图片和视频在文章最后的链接里。
一开始先倒包
#importing some useful packages
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import numpy as np
import cv2
%matplotlib inline开始读取图片
#reading in an image
image = mpimg.imread('test_images/solidWhiteRight.jpg')
#printing out some stats and plotting
print('This image is:', type(image), 'with dimensions:', image.shape)
plt.imshow(image) # if you wanted to show a single color channel image called 'gray', for example, call as plt.imshow(gray, cmap='gray')
下面是一些辅助函数(选用,可以根据自己想法添加删除其他方法)
import math
def grayscale(img):
"""Applies the Grayscale transform
This will return an image with only one color channel
but NOTE: to see the returned image as grayscale
(assuming your grayscaled image is called 'gray')
you should call plt.imshow(gray, cmap='gray')"""
return cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
#使图像变成灰度图
# Or use BGR2GRAY if you read an image with cv2.imread()
# return cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
def canny(img, low_threshold, high_threshold):
"""Applies the Canny transform"""
#这个是用于边缘检测的 需要处理的原图像,该图像必须为单通道的灰度图
#其中较大的阈值2用于检测图像中明显的边缘,但一般情况下检测的效果不会那么完美,
#边缘检测出来是断断续续的。
#所以这时候用较小的第一个阈值用于将这些间断的边缘连接起来。
return cv2.Canny(img, low_threshold, high_threshold)
def gaussian_blur(img, kernel_size):
#在某些情况下,需要对一个像素的周围的像素给予更多的重视。
#因此,可通过分配权重来重新计算这些周围点的值。
#这可通过高斯函数(钟形函数,即喇叭形数)的权重方案来解决。
"""Applies a Gaussian Noise kernel"""
return cv2.GaussianBlur(img, (kernel_size, kernel_size), 0)
def region_of_interest(img, vertices):
"""
Applies an image mask.
Only keeps the region of the image defined by the polygon
formed from `vertices`. The rest of the image is set to black.
`vertices` should be a numpy array of integer points.
"""
#defining a blank mask to start with
mask = np.zeros_like(img)
#defining a 3 channel or 1 channel color to fill the mask with depending on the input image
if len(img.shape) > 2:
channel_count = img.shape[2] # i.e. 3 or 4 depending on your image
ignore_mask_color = (255,) * channel_count
else:
ignore_mask_color = 255
#filling pixels inside the polygon defined by "vertices" with the fill color
cv2.fillPoly(mask, vertices, ignore_mask_color)
#该函数填充了一个有多个多边形轮廓的区域
#returning the image only where mask pixels are nonzero
masked_image = cv2.bitwise_and(img, mask)
return masked_image
def draw_lines(img, lines, color=[255, 0, 0], thickness=2):
"""
NOTE: this is the function you might want to use as a starting point once you want to
average/extrapolate the line segments you detect to map out the full
extent of the lane (going from the result shown in raw-lines-example.mp4
to that shown in P1_example.mp4).
Think about things like separating line segments by their
slope ((y2-y1)/(x2-x1)) to decide which segments are part of the left
line vs. the right line. Then, you can average the position of each of
the lines and extrapolate to the top and bottom of the lane.
This function draws `lines` with `color` and `thickness`.
Lines are drawn on the image inplace (mutates the image).
If you want to make the lines semi-transparent, think about combining
this function with the weighted_img() function below
"""
#这个函数我也不是很理解,下面这种写法是最基本的,可以试试,其实效果并不是很好
for line in lines:
for x1,y1,x2,y2 in line:
cv2.line(img, (x1, y1), (x2, y2), color, thickness)
#下面是高阶的draw_lines()的写法,供参考,我是无法理解,太复杂了
# imshape = img.shape
# slope_left=0
# slope_right=0
# leftx=0
# lefty=0
# rightx=0
# righty=0
# i=0
# j=0
# for line in lines:
# for x1,y1,x2,y2 in line:
# slope = (y2-y1)/(x2-x1)
# if slope >0.1: #Left lane and not a straight line
# # Add all values of slope and average position of a line
# slope_left += slope
# leftx += (x1+x2)/2
# lefty += (y1+y2)/2
# i+= 1
# elif slope < -0.2: # Right lane and not a straight line
# # Add all values of slope and average position of a line
# slope_right += slope
# rightx += (x1+x2)/2
# righty += (y1+y2)/2
# j+= 1
# # Left lane - Average across all slope and intercepts
# if i>0: # If left lane is detected
# avg_slope_left = slope_left/i
# avg_leftx = leftx/i
# avg_lefty = lefty/i
# # Calculate bottom x and top x assuming fixed positions for corresponding y
# xb_l = int(((int(0.97*imshape[0])-avg_lefty)/avg_slope_left) + avg_leftx)
# xt_l = int(((int(0.61*imshape[0])-avg_lefty)/avg_slope_left)+ avg_leftx)
# else: # If Left lane is not detected - best guess positions of bottom x and top x
# xb_l = int(0.21*imshape[1])
# xt_l = int(0.43*imshape[1])
# # Draw a line
# cv2.line(img, (xt_l, int(0.61*imshape[0])), (xb_l, int(0.97*imshape[0])), color, thickness)
# #Right lane - Average across all slope and intercepts
# if j>0: # If right lane is detected
# avg_slope_right = slope_right/j
# avg_rightx = rightx/j
# avg_righty = righty/j
# # Calculate bottom x and top x assuming fixed positions for corresponding y
# xb_r = int(((int(0.97*imshape[0])-avg_righty)/avg_slope_right) + avg_rightx)
# xt_r = int(((int(0.61*imshape[0])-avg_righty)/avg_slope_right)+ avg_rightx)
# else: # If right lane is not detected - best guess positions of bottom x and top x
# xb_r = int(0.89*imshape[1])
# xt_r = int(0.53*imshape[1])
# # Draw a line
# cv2.line(img, (xt_r, int(0.61*imshape[0])), (xb_r, int(0.97*imshape[0])), color, thickness)
def hough_lines(img, rho, theta, threshold, min_line_len, max_line_gap):
"""
`img` should be the output of a Canny transform.
Returns an image with hough lines drawn.
"""
lines = cv2.HoughLinesP(img, rho, theta, threshold, np.array([]), minLineLength=min_line_len, maxLineGap=max_line_gap)
#霍夫变换线 用来测试直线的
#函数cv2.HoughLinesP()是一种概率直线检测
#我们知道,原理上讲hough变换是一个耗时耗力的算法,尤其是每一个点计算,
#即使经过了canny转换了有的时候点的个数依然是庞大的,这个时候我们采取一种概率挑选机制,
#不是所有的点都计算,而是随机的选取一些个点来计算,相当于降采样了
#这样的话我们的阈值设置上也要降低一些。在参数输入输出上,输入不过多了两个参数:
#minLineLengh(线的最短长度,比这个短的都被忽略)和MaxLineCap
#(两条直线之间的最大间隔,小于此值,认为是一条直线)。
line_img = np.zeros((img.shape[0], img.shape[1], 3), dtype=np.uint8)
draw_lines(line_img, lines)
return line_img
# Python 3 has support for cool math symbols.
def weighted_img(img, initial_img, α=0.8, β=1., γ=0.):
"""
`img` is the output of the hough_lines(), An image with lines drawn on it.
Should be a blank image (all black) with lines drawn on it.
`initial_img` should be the image before any processing.
The result image is computed as follows:
initial_img * α + img * β + γ
NOTE: initial_img and img must be the same shape!
"""
return cv2.addWeighted(initial_img, α, img, β, γ)
#划线显示权重,α越大 背景图越清楚,β越大,线在图像上显示越深开始测试图片
import os
os.listdir("test_images/")
下面就是主要实现函数,和一些参数调整
def line_detect(image):
gary = grayscale(image)
kernel_size = 9
blur_gray = gaussian_blur(gary,kernel_size)
low_threshold = 10
high_threshold = 150
edges = canny(blur_gray,low_threshold,high_threshold)
imshape = image.shape
vertices = np.array([[(0,imshape[0]),(int(0.45*imshape[1]),int(0.6*imshape[0])),
(int(0.6*imshape[1]),int(0.6*imshape[0])), (imshape[1],imshape[0])]], dtype=np.int32)
masked_edges = region_of_interest(edges,vertices)
rho = 1 # distance resolution in pixels of the Hough grid
theta = np.pi/180 # angular resolution in radians of the Hough grid
threshold = 30 # minimum number of votes (intersections in Hough grid cell)
min_line_length = 150 #minimum number of pixels making up a line
max_line_gap = 100 # maximum gap in pixels between connectable line segments
#threshod: 累加平面的阈值参数,int类型,超过设定阈值才被检测出线段,值越大,
#基本上意味着检出的线段越长,检出的线段个数越少。根据情况推荐先用100试试
#minLineLength:线段以像素为单位的最小长度,根据应用场景设置
#maxLineGap:同一方向上两条线段判定为一条线段的最大允许间隔(断裂),
#超过了设定值,则把两条线段当成一条线段
#,值越大,允许线段上的断裂越大,越有可能检出潜在的直线段
line_image = hough_lines(masked_edges,rho,theta,threshold,min_line_length,max_line_gap)
result = weighted_img(line_image,image, α=0.8, β=1.)
return edges,masked_edges,result下面是把图片都显示出来,分为4幅图片,原图,Canny变化后的图,masked后的图,最终结果图
import glob
new_path = os.path.join("test_images/","*.jpg")for infile in glob.glob(new_path):
image = mpimg.imread(infile)
edges,masked_edges,result = line_detect(image)
plt.figure(figsize=(20,10))
fig = plt.figure()
plt.subplot(221)
plt.title("original image")
plt.imshow(image)
plt.subplot(222)
plt.title("Canny")
plt.imshow(edges,cmap = "gray")
plt.subplot(223)
plt.title("masked image")
plt.imshow(masked_edges,cmap = "gray")
plt.subplot(224)
plt.title("result")
plt.imshow(result)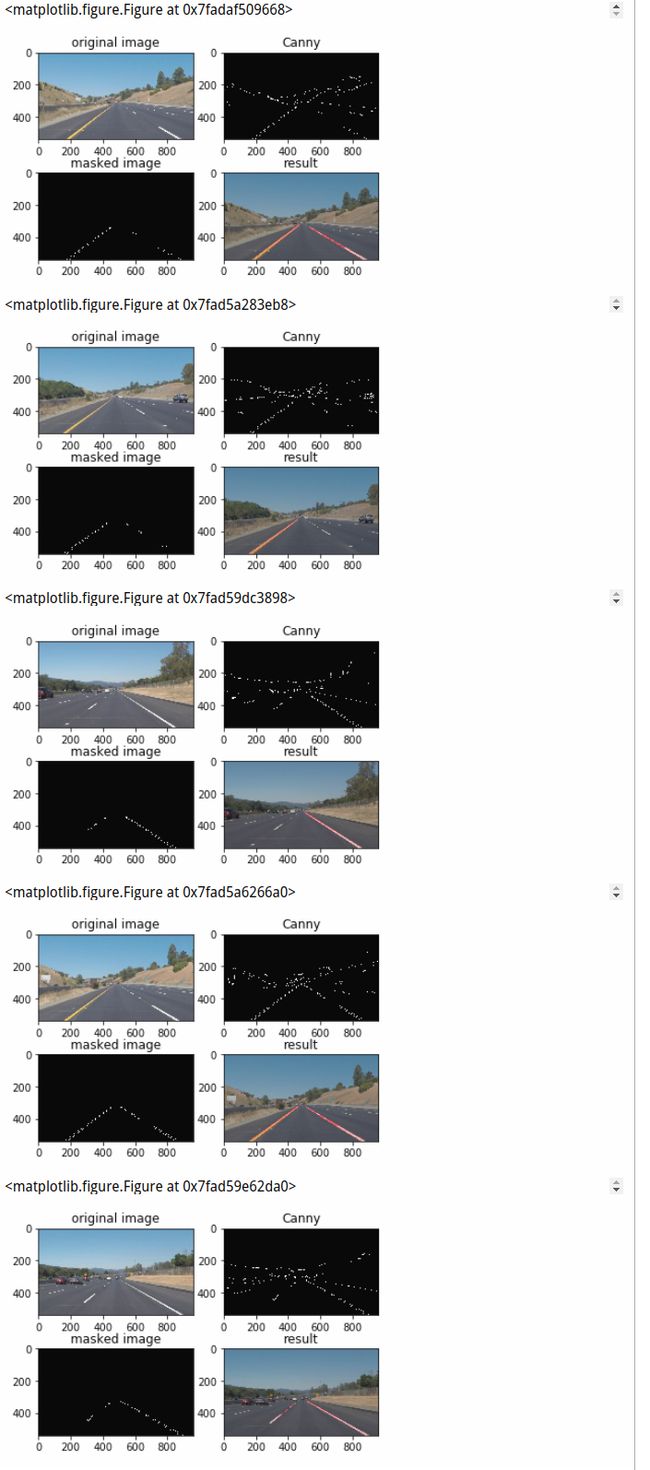

在视频上显示车道线
# Import everything needed to edit/save/watch video clips
from moviepy.editor import VideoFileClip
from IPython.display import HTML
def process_image(image):
# NOTE: The output you return should be a color image (3 channel) for processing video below
# TODO: put your pipeline here,
# you should return the final output (image where lines are drawn on lanes)
edges,masked_edges,result = line_detect(image)
return resultwhite_output = 'test_videos_output/solidWhiteRight.mp4'
## To speed up the testing process you may want to try your pipeline on a shorter subclip of the video
## To do so add .subclip(start_second,end_second) to the end of the line below
## Where start_second and end_second are integer values representing the start and end of the subclip
## You may also uncomment the following line for a subclip of the first 5 seconds
##clip1 = VideoFileClip("test_videos/solidWhiteRight.mp4").subclip(0,5)
clip1 = VideoFileClip("test_videos/solidWhiteRight.mp4")
white_clip = clip1.fl_image(process_image) #NOTE: this function expects color images!!
%time white_clip.write_videofile(white_output, audio=False)
HTML("""
""".format(white_output))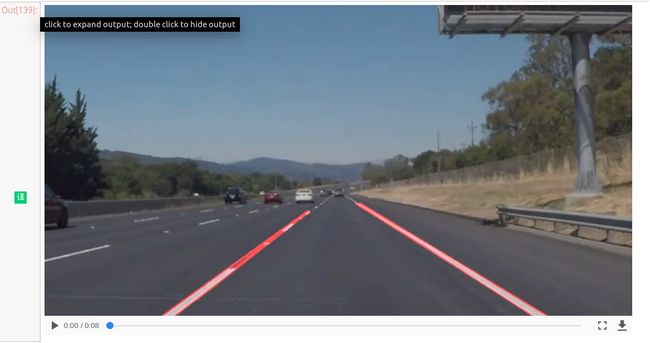
第二个视频
yellow_output = 'test_videos_output/solidYellowLeft.mp4'
## To speed up the testing process you may want to try your pipeline on a shorter subclip of the video
## To do so add .subclip(start_second,end_second) to the end of the line below
## Where start_second and end_second are integer values representing the start and end of the subclip
## You may also uncomment the following line for a subclip of the first 5 seconds
##clip2 = VideoFileClip('test_videos/solidYellowLeft.mp4').subclip(0,5)
clip2 = VideoFileClip('test_videos/solidYellowLeft.mp4')
yellow_clip = clip2.fl_image(process_image)
%time yellow_clip.write_videofile(yellow_output, audio=False)HTML("""
""".format(yellow_output))到这里就算是完结了,这里的主要难点还是draw_lines()这个函数,怎么去优化划线。
链接:https://pan.baidu.com/s/1BQZU2UvqkTCguodha3NwZw 密码:60kg