详解无人驾驶汽车工作原理及关键技术。

无人驾驶汽车工作原理及关键技术
一、无人驾驶汽车技术介绍
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目标。
据汤森路透知识产权与科技最新报告显示,2010年到 2015年间,与汽车无人驾驶技术相关的发明专利超过22,000件,并且在此过程中,部分企业已崭露头角,成为该领域的行业领导者。
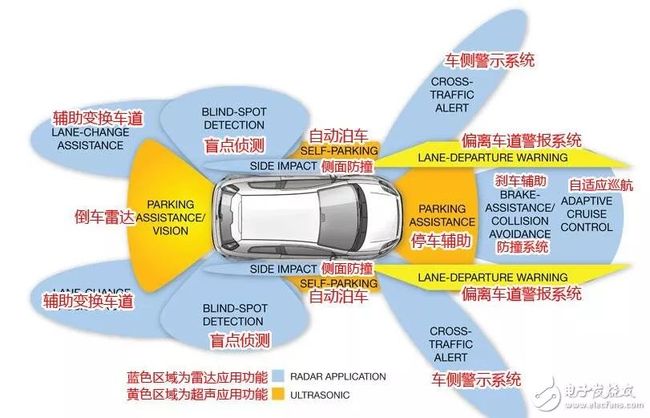
无人驾驶汽车技术图解
二、无人驾驶汽车技术
如同其他很多事物一样,无人驾驶实际上也有一个技术循序渐进发展的过程。无人驾驶也需分为不同阶段。
阶段一:辅助驾驶阶段。车道保持、自适应巡航等辅助驾驶功能,均属于这个阶段的技术,不过驾驶员仍旧是操作主体。
阶段二:半自动驾驶。在这个阶段中,电脑操纵下的自动驾驶已经可以完成前往目的地的过程,其可作为备用系统完成行驶,但受限于法律法规等因素,其仍旧不能作为整个驾驶行为的主体存在。
阶段三:全自动驾驶。技术、成本、法衡去规等因素都不再成为影响普及的因素,电脑控制的系统已经作为驾驶主体而存在,驾驶员也可以随时接管操作系统。
由于技术和法规等的限制,目前的无人驾骆气车大多处于第=阶段。当前主流的无人驾驶汽车技术有激光雷达式和摄像头+测距雷达式两种。
1、激光雷达式
自上世纪80年代DARPA的ALV项目以来,我们看到的大多数现代自动驾驶原型车上都布满了传感器,并且头顶着一台激光雷达。车辆使用传感器的探测以及激光雷达的三维立体扫描来“感知”周围的世界,而车载控制计算机则像人类大脑一样决定需要进行的操作。Google的无人驾驶汽车就是激光雷达应用的典型代表。
Google算得上是最早跨界进行自动驾驶汽车研发的互联网公司,同时依托着自己独有的地图和大数据计算资源,在这一领域具有领先的优势。由于自身有着地图和街景这样先天的优势,Google自动驾驶车辆使用一台由Velodyne公司提供的64位三维激光雷达将周围环境绘制成一幅3D地图,并与Google的高精度地图相结合,利用计算机以及云端网络进行大数据处理,最终实现自动驾驶功能:
早期的丰田普锐斯原型车搭载了视频摄像头、激光雷达、位置传感器和测距雷达几种传感装置。其中视频摄像头用来判断交通信号灯以及任何移动的物体;激光雷达用于形成真实道路环境的3D地图;测距雷达用于探测车辆周围的障碍物,一旦有物体接近,车辆将自动减速;位于左后轮处的位置传感器用来侦测和估算车辆的侧向位置偏移,以判断车辆在地图上的位置。
在经过多年的试验后,Google推出了自己的无人驾驶原型车。这台原型车上同样搭载了诸多雷达及传感器,以及耸立在车顶上的激光雷达。Google的无人驾驶汽车已经取消了方向盘,汽车完全靠车载计算机进行操控,是目前最接近无人驾驶概念的汽车。
2、摄像头+测距雷达式
奔驰公司在80年代就开始研发无人驾驶技术,在2013年其研发的无人驾驶汽车成功的从斯图加特行驶到法兰克福,行驶里程约100 km。该无人驾驶汽车是在并没有采用激光雷达,而是采用摄像机+测距雷达的组合实现了对周围环境的监测。page_break]
车头两侧的长距雷达可以更早地发现远处的路口;另外的长距雷达监控着车辆前后的交通路况;车身四角的四个短距雷达可迅速侦测到车辆周围的事物以及其他车辆;车前风挡处的摄像机负责识别交通标识,后风挡处的摄像机拍摄街景,通过与导航系统中的地形特点比对和辨别来确定车辆的精确位置。这辆无人驾驶汽车的立体摄像机也进行了相应的改进,从而可以进一步提升探测距离。尽管是一台真正的自动驾驶车辆,但还保留了传统汽车的完整的操作方式。与Google自动驾驶车辆类似,它对于路面障碍的侦测完全来自车辆自身的传感装置。不过,奔驰使用了更加成熟的摄像头组合代替了激光雷达,因此在成本上更容易进行控制,同时也不会破坏现有车辆的外观质感。
奔驰在2015年又推出了新能源自动驾驶概念车F015。奔驰F015概念车利用立体摄像头、雷达以及超声波传感器来获取车辆四周的环境数据,来为自动驾驶提供大量的参考信息。高精度GPS配合三维导航地图,可以确保车辆定位精度达到厘米级别。

三、无人驾驶汽车关键技术
无人驾驶汽车是未来汽车发展的方向,是各种顶尖科技成果为一体的智慧型汽车。就目前发展现状来看,还有以下几个方面的技术需取得突破。
1、传感器技术
现在无人车能出现很大程度上依赖传感器的进步。现在的无人驾驶汽车采用激光雷达,直接感知路面状况,用于分析计算。
2、定位
目前主要的定位系统中美国的GPS应用最为广泛,技术也较为成熟,但目前民用的GPS定位精度远达不到无人车的需求,GPS官方民用定位精度“<<10 m”,更高精度的GPS基本要依靠差分完成。差分的原理很简单:设置一个固定基站,固定基站校准位置,再将信号传递给车载设备,车载设备在接收到基站信号和GPS信号后差分获得。但是每一个基站的有效范围也就30 km。于是有很多技术要解决GPS精度不足的问题,如地图匹配。
3、避障
车辆前方有障碍,障碍物是运动的还是静止的,车是停下来还是绕过去。这部分主要的难度是从传感器识别障碍,在车辆运动的前提下,确定障碍的运动状态。也就是说你要在运动的坐标系下,计算另一个物体相对静坐标系的速度,并作出判断。
4、识别
人能轻易识别出道路上的交通标识,如限速牌、红绿灯,同时作出相应的反应,但这对于机器来说是一个困难的挑战。目前的机器视觉技术还难以识别像树木、行人、动物等物体。这些物体的识别都要通过视觉系统完成。在无人车上不但需要能在有限的时间里识别出来,并且还要考虑道路中可能有的光线变化、遮挡等问题。要完善解决这些问题,还需要等待机器视觉和图像识别领域的技术突破。
5、控制
除了上面的避障以外,其他外围机构的改造可能会存在一些改造上的问题。如何介入转向架、如何介入油门。这部分技术的难度较小,汽车控制技术如今已比较成熟,而无人驾驶汽车在未来基本为纯电动汽车,在控制难度上将小于传统的内燃机汽车。
品略图书馆 http://www.pinlue.com/