[从零构建光栅渲染器] 4.透视投影
[从零构建光栅渲染器] 4.透视投影
非常感谢和推荐Sokolov的教程,Sokolov使用500行C++代码实现一个光栅渲染器。教程学习过程非常平滑,从画点、线和三角形开始教学,在逐步深入三维变换,投影,再到顶点着色器,片段着色器等等。教程地址:https://github.com/ssloy/tinyrenderer。Sokolov的教程为英文,我翻译了其文章。
在学习过程中,有些内容可能您可能云里雾里,这时就需要查阅《计算机图形学》的书籍了,这里面的算法和公式可以帮助您理解代码。
作者:憨豆酒(YinDou),联系我yindou97@163.com,熟悉图形学,图像处理领域,本章的源代码可在此仓库中找到https://github.com/douysu/person-summary:如果对您有帮助,还请给一个star,如果大家发现错误以及不合理之处,还希望多多指出。
我的知乎
我的Github
我的博客
本章运行结果
![[从零构建光栅渲染器] 4.透视投影_第1张图片](http://img.e-com-net.com/image/info8/598f85d23da44ee59a107208ca443be8.jpg)
提醒:
翻译作者内容:相比上一章,本章的渲染效果加上了投影。如果本章内容有看不懂的地方,建议找一本图形学的书籍阅读一下变换部分,或者阅读LearnOpenGL上面的教程。
已经有很多中文资料讲解变换和投影了,可以配合着中文资料来学习本章。
目标
在前面的课程中,我们通过简单地忘记z坐标,用正投影的方式渲染了模型,今天我们学习如何使用透视除法。
2D几何
一个平面上的线性变换可以用对应的矩阵表示,如果我们取一个点(x,y),那么它的变换可以写成如下所示。
![]()
比较简单的变换是本身的变换,矩阵不移动任何点。
![]()
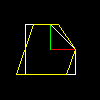
矩阵的对角线系数给出了沿坐标轴的缩放比例。让我们举例说明一下,如果我们进行以下变换:
![]()
然后,白色物体(被砍掉一个角的白色方块)将被转化为黄色物体。红色和绿色的线段分别给出单位长度的向量,分别与x和y对齐。
文章使用的图像生成代码在这里。this code.
我们为什么要用矩阵?因为它很方便。首先,用矩阵的形式,我们可以这样表达整个对象的变换。
![]()
在这个表达式中,变换矩阵与前一个表达式相同,但2x5矩阵除了我们的方块状对象的顶点外,其他的都不是什么。我们只需把数组中的所有顶点都拿出来,乘以变换矩阵,就得到了变换后的对象。很酷吧?
那么,真正的原因就隐藏在这里:很多时候,我们希望在一连串的变换中,用很多变换来变换我们的对象。想象一下,在你的源码中,你写的变换函数像:
vec2 foo(vec2 p) return vec2(ax+by, cx+dy);
vec2 bar(vec2 p) return vec2(ex+fy, gx+hy);
[..]
for (each p in object) {
p = foo(bar(p));
}
这段代码对我们的对象的每个顶点进行两次线性变换,往往我们计算这些顶点的次数是以百万计。而且一排几十次变换的情况并不罕见,导致几千万次的运算,真的很浪费资源。在矩阵形式下,我们可以将所有的变换矩阵进行预乘,对我们的对象进行一次变换。对于一个只有乘法的表达式,我们可以把括号放在想放的地方,是不是?
好了,让我们继续说下去。我们知道,矩阵的对角线系数是沿着坐标轴对我们的对象进行缩放。那么其他系数的作用是什么呢?让我们考虑一下下面的变换。
结果成这样:
这是一个简单的沿x轴的错切,另一个反对角元素沿着y轴错切空间。因此,在一个平面上有两个基础线性变换:缩放和错切。很多读者反映,那旋转呢?
原事实证明,任何旋转(绕原点旋转)都可以表示为三个错切的组合动作,这里白色对象被转换为红色对象,然后转换为绿色对象,最后转换为蓝色对象:
![[从零构建光栅渲染器] 4.透视投影_第2张图片](http://img.e-com-net.com/image/info8/6bc63d146fa74641950fbc821a02dc77.png)
但这些就很复杂了,为了让事情简单,我们直接写一个旋转矩阵。
翻译作者内容:可以查看图形学的书籍变换的内容。
我们可以按照任意顺序进行乘法,但我们要记住,对于矩阵的乘法是不换向的。
![]()
这句话是有道理的:错切一个物体,然后再去旋转它,和旋转后再去错切它是不一样的!

翻译作者内容:在线性代数中学习过,矩阵相乘是不可逆的。
2D 仿射变换
所以,平面上的任何线性变换都是由缩放和错切变换组成的。而这意味着,我们可以做任何线性变换,原点永远不会移动! 这些可行性是很大,但如果我们不能进行简单的变换,我们的编程就很难过。我们能做到吗?好吧,平移不是线性的,没问题,让我们在执行完线性部分后,再尝试着进行附加平移。
![]()
这个表达方式真的很酷。我们可以进行旋转、缩放、错切和平移。然而,让我们回想一下,我们感兴趣的是组成多个变换。下面是两个变换的组成是什么样子的(记住,我们需要组成几十个这样的变换)。
![]()
只是一个顶点(x,y)变换就得嵌套这么多层,这显然是不行的。
下面我们就想办法换成一个矩阵。
齐次坐标
好了,现在是黑魔法的时候了。想象一下,我在我们的变换矩阵中加入一列,一列(从而使其成为3x3),并将一个坐标始终等于1的坐标附加到要变换的向量上。例如下面这样。
如果我们把这个矩阵和向量乘以1,我们就会得到另一个向量,最后一个分量中的1,但另外两个分量的形状和我们想要的完全一样很神奇。观察到与上一节的计算结果是相同的。
事实上,这个想法其实很简单。平行平移在2D空间中不是线性的。所以我们把我们的2D空间嵌入到3D空间中(只需在第3个分量中加1即可)。也就是说,我们的2D空间就是3D空间中的平面z=1。然后我们进行线性三维变换,并将结果投影到我们的二维物理平面上。平行变换并没有变成线性变换,但流水线很简单。
我们如何将3D投影到2D平面上?很简单,就是用3D分量进行除法。

等一下,禁止除以0!
谁说的这个。让我们回顾一下管线
- 我们将2D嵌入到3D中,将其嵌入到z=1的平面内。
- 我们可以在3D中为所欲为
- 对于每一个要从三维投影到二维的点,我们在原点和要投影的点之间画一条直线,然后找到它与平面z=1的交点。
在这个图像中,我们的二维平面是品红色的,点(x,y,z)被投影到(x/z,y/z)上。
![[从零构建光栅渲染器] 4.透视投影_第3张图片](http://img.e-com-net.com/image/info8/707a5677028e4822b406d05e3b3a2af4.png)
让我们想象一下点(x,y,1)垂直投影会投影到哪里?答案是在(x,y)平面上:
![[从零构建光栅渲染器] 4.透视投影_第4张图片](http://img.e-com-net.com/image/info8/15897f37d0684200b16c95c778e55907.png)
现在让我们下降到轨道上,例如,将点(x,y,1/2)投影到(2x,2y)上:
![[从零构建光栅渲染器] 4.透视投影_第5张图片](http://img.e-com-net.com/image/info8/57b95b3494ea42d0bcb48cf6b6804671.png)
让我们继续,点(x,y,1/4) 成为(4x, 4y):
![[从零构建光栅渲染器] 4.透视投影_第6张图片](http://img.e-com-net.com/image/info8/c42c1ebc77b645e89f9f08f6aaa7cd71.jpg)
如果我们继续这个过程,接近z=0,那么投影就会在(x,y)的方向上离原点更远。换句话说,点(x,y,0)在(x,y)的方向上被投影到一个无限远的点上。它是什么呢?对了,它只是一个向量!
齐次坐标可以区分向量和点。如果一个程序员写了vec2(x,y),那么它到底是向量还是点呢?很难说。结论就是:在齐次坐标中,所有z=0的东西都是向量,其余的都是点。看:向量+向量=向量。向量-向量=向量。点+向量=点。这样比较好,不是吗?
综合变换
正如我之前说的,我们应该积累数十个转换。什么要这样做?让我们想象一下,我们需要将一个物体(2D)围绕一个点(x0,y0)旋转。怎么做呢?我们可以在某处查找公式,或者我们可以自己去完成,我们需要的工具都有了!

在3D中,动作的序列会有点长,但想法是一样的:我们需要知道一些基本的变换,在它们的帮助下,我们可以表示任何组成的动作。
翻译作者内容:先平移,在旋转,在平移回来就完成了。
等一下,3×3矩阵的底部是做什么用的呢
这部分比较难理解,推荐看这里。https://zhuanlan.zhihu.com/p/66384929
对角线是缩放,右边是平移,那下面的内容是干什么用的呢。
当然可以!让我们将以下转换应用于我们的标准方形对象:
回想一下原始对象是白色的,单位轴矢量是红色和绿色的:
![[从零构建光栅渲染器] 4.透视投影_第7张图片](http://img.e-com-net.com/image/info8/242e009396d34564a22193e23066210b.png)
这是转换后的:
![[从零构建光栅渲染器] 4.透视投影_第8张图片](http://img.e-com-net.com/image/info8/d2e47e20ff0a42f8aa8a3eb749da92ce.png)
这里又发生了另一种有意思的事情(白色!)。你还记得我们的y-buffer练习吗?这里我们也要做同样的练习:我们把二维物体投射到垂直线x=0上,让我们把规则变困难一点:我们必须使用中心投影,我们的相机在点(5,0)上,并指向原点。为了找到投影,我们需要在摄像机和要投影的点(黄色)之间画出直线,并找到与屏幕线的交点(白色垂直)。
![[从零构建光栅渲染器] 4.透视投影_第9张图片](http://img.e-com-net.com/image/info8/83fdd7b086514a7da6b9dc07d7eeb46e.png)
现在,我用转换后的对象代替原来的对象,但我不碰我们之前画的黄色线条:
![[从零构建光栅渲染器] 4.透视投影_第10张图片](http://img.e-com-net.com/image/info8/646c53f5a3544b8c836829cb6d2ea519.png)
如果我们用标准的正交投影法将红色物体投射到屏幕上,那么我们就会发现完全一样的点! 让我们仔细观察一下变换的工作原理:所有的垂直段都会被变换成垂直段,但靠近摄像头的部分会被拉伸,而远离摄像头的部分会被缩小。如果我们正确地选择系数(在我们的变换矩阵中是-1/5系数),我们就会得到一个透视(中心)投影的图像!如果我们正确地选择系数,我们就会得到一个透视(中心)投影的图像。
到3D空间工作了
让我们解释一下其中的奥妙。对于二维仿射变换,对于三维仿射变换,我们将使用齐次坐标:将一个点(x,y,z)用1(x,y,z,1)增强,然后在4D中进行变换,再投射回三维。例如,如果我们取下面的变换。
逆向投影给了我们以下的三维坐标。
让我们记住这个结果,但暂时把它放在一边。让我们回到中心投影的标准定义,没有任何花哨的东西作为4D变换。给定一个点P=(x,y,z),我们要把它投影到z=0的平面上,相机在z轴上的点(0,0,c)。
![[从零构建光栅渲染器] 4.透视投影_第11张图片](http://img.e-com-net.com/image/info8/8047775429d1445e9b0a81db9bfb713c.jpg)
三角形ABC和ODC是相似的。这意味着我们可以写出以下的内容。 |AB|/|AC|=|OD|/|OC| => x/(c-z) = x’/c。换句话说,就是:
![]()
通过对三角形CPB和CP’D进行同样的推理,很容易找到下面的表达式。
![]()
这真的和我们刚才的结果很相似,但是在那里我们通过一个矩阵乘法得到了结果。我们得到了系数的规律:r=-1/c。
让我们总结我们今天学习的公式
如果你在不理解上面的材料的情况下就简单地复制粘贴这个公式,我恨死你了。
所以,如果我们想用一个位于z轴上的摄像头(重要!)相机在距离原点c的z轴上,计算出一个中心投影,那么我们把这个点用1的方法将其增强到4D中,然后用下面的矩阵乘以1,再将其逆向投影到3D中。
![[从零构建光栅渲染器] 4.透视投影_第12张图片](http://img.e-com-net.com/image/info8/d00e329c7889457b8cc6a679a79b43bc.jpg)
我们对我们的对象进行了变形,只需忘记它的Z坐标,我们就可以得到一个透视画。如果我们要使用z-buffer,那么自然也不要忘记z。