Opencv学习笔记(七) 模板匹配(基于某特征模板识别图像)
什么是模板匹配 ?
本文参考链接:Opencv官方文档
官方介绍:
模板匹配是一种最原始、最基本的模式识别方法,研究某一特定对象物的图案位于图像的什么地方,进而识别对象物,这就是一个匹配问题。它是图像处理中最基本、最常用的匹配方法。
作者观点:
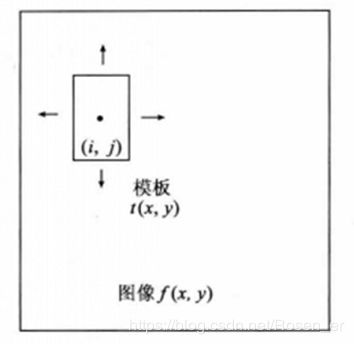
模板匹配其实通过识别已知模板的特征,然后根据此特征对待检测的图像进行遍历地扫描,识别出待检测图像中与模板特征最相似的像素并且定位。(就好比是给你一朵花的照片,让你在一片花丛中寻找这朵花一样。)
但是需要注意的是,模板匹配具有自身的局限性,主要表现在它只能进行平行移动,若原图像中的匹配目标发生旋转或大小变化,该算法无效。
相关API:
matchTemplate()函数
void matchTemplate
(
InputArray image,
InputArray templ,
OutputArray result,
int method
InputArray mask = noArray()
);
image:输入图像,必须为8位或者32位的浮点型。
templ:用于搜索的模板图像,必须小于输入图像并且是一样的数据类型。
result:匹配结果图像。必须是单通道32位浮点型,且大小是(W-w+1)*(H-h+1),其中W,H分别为输入图像的宽和高,w,h分别为模板图像的宽和高。
method:模板匹配的方法。
mask :蒙版。
(模板匹配共分为五种匹配的方法:平方差匹配 TM_SQDIFF、标准平方差匹配 TM_SQDIFF_NORMED、相关匹配 TM_CCORR、 标准相关匹配 TM_CCORR_NORMED、相关系数匹配TM_CCOEFF)
因模板匹配的计算方法涉及到复杂的数学公式和方法,这里我们不作展开,有需要的朋友可以参考一下opencv官方中文文档。
通过此函数输出的结果还要经过归一化处理(normalize()函数)
minMaxLoc()函数(定位最匹配的位置)
该函数的详细介绍可参考:
minMaxLoc()函数介绍
代码演示:
#include
#include
#include
using namespace std;
using namespace cv;
Mat src, temp, dst;
int match_method = TM_SQDIFF;
int max_track = 5;
const char* INPUT_T = "input image";
const char* OUTPUT_T = "result image";
const char* match_t = "template match-demo";
void Match_Demo(int, void*);
int main(int argc, char** argv)
{
// 待检测图像
src = imread("C:/Users/86159/Desktop/yasina1.jpg");
// 模板图像
temp = imread("C:/Users/86159/Desktop/butterfly.png");
if (src.empty() || temp.empty()) {
printf("could not load image...\n");
return -1;
}
namedWindow(INPUT_T, WINDOW_AUTOSIZE); //显示模板图像
imshow(INPUT_T, temp);
namedWindow(OUTPUT_T, WINDOW_NORMAL); //创建并调整窗口
resizeWindow(OUTPUT_T, 500, 500);
moveWindow(OUTPUT_T, 500, 0);
namedWindow(match_t, WINDOW_NORMAL);
resizeWindow(match_t, 500, 500);
const char* trackbar_title = "Match Algo Type:";
createTrackbar(trackbar_title, OUTPUT_T, &match_method, max_track, Match_Demo); //创建滑动条
Match_Demo(0, 0);
waitKey(0);
return 0;
}
void Match_Demo(int, void*)
{
int width = src.cols - temp.cols + 1;
int height = src.rows - temp.rows + 1;
Mat result(width, height, CV_32FC1);
matchTemplate(src, temp, result, match_method, Mat()); //模板匹配
normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat()); //归一化处理
Point minLoc;
Point maxLoc;
double min, max;
src.copyTo(dst);
Point temLoc;
minMaxLoc(result, &min, &max, &minLoc, &maxLoc, Mat()); //定位最匹配的位置
if (match_method == TM_SQDIFF || match_method == TM_SQDIFF_NORMED) {
temLoc = minLoc;
}
else {
temLoc = maxLoc;
}
// 绘制矩形
rectangle(dst, Rect(temLoc.x, temLoc.y, temp.cols, temp.rows), Scalar(0, 0, 255), 5, 8);
rectangle(result, Rect(temLoc.x, temLoc.y, temp.cols, temp.rows), Scalar(0, 0, 255), 5, 8);
imshow(OUTPUT_T, result);
imshow(match_t, dst);
}
效果展示:
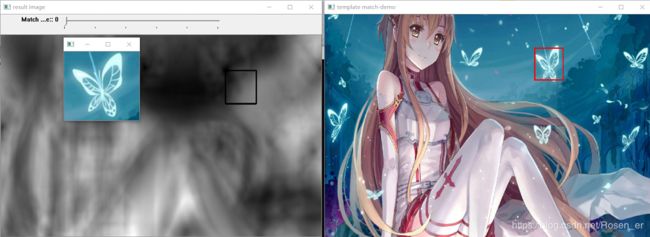
希望对读者有所帮助,喜欢的话可以关注一下我的公众号,我会把学习笔记发在上面,大家可以一起共同学习!

