- AUTO TECH 2025 广州国际汽车软件与安全技术展览会
ws201907
汽车安全
AUTOTECH2025广州国际汽车软件与安全技术展览会ChinaGuangzhouSoftware-DefinedVehicleExpo2025亚洲领先的汽车软件与安全技术专业展会——是与来自世界各地的汽车工程师们交流的最佳平台!广州国际汽车软件与安全技术展览会是AUTOTECH2025华南展专题展之一,汇集了各种汽车嵌入式软件开发与应用、车载操作系统、智驾功能安全与SOTIF、基础软件平台、车
- 力扣刷题记录(一)剑指Offer(第二版)
乘凉~
求职过程记录leetcode链表算法
1、本栏用来记录社招找工作过程中的内容,包括基础知识学习以及面试问题的记录等,以便于后续个人回顾学习;暂时只有2023年3月份,第一次社招找工作的过程;2、个人经历:研究生期间课题是SLAM在无人机上的应用,有接触SLAM、Linux、ROS、C/C++、DJIOSDK等;3、参加工作后(2021-2023年)岗位是嵌入式软件开发,主要是服务器开发,Linux、C/C++、网络编程、docker容
- 【备战软考(嵌入式系统设计师)】04-嵌入式软件架构
折途想要敲代码
备战软考架构嵌入式硬件mcu单片机
嵌入式操作系统嵌入式系统有以下特点:要求编码体积小,能够在有限的存储空间内运行。面向应用,可以进行裁剪和移植。用于特定领域,可以支持多任务。可靠性高,及时响应,无需人工干预独立运行。实时性高,且要求固态存储。要求在系统投入前就具有确定性和可预测性。一般考在选择题。机内自检BIT(Built-InTest,机内自检),可以完成对故障的检测和定位。包括下面四种:上电BIT:在系统上电的时候对所有硬件资
- 开放麒麟操作系统能打动嵌入式软件工程师吗?
物联网_区块链_边缘计算_人工智能
嵌入式硬件soclinuxqtiot
国产操作系统大部分客户其实是toB的,内核以外的源码也是不开源的,比如麒麟系、统信UOS等,个人学习、小企业基本不会用。7月5日开放麒麟操作系统v1.0版正式发布,不同点是这个操作系统从内核到桌面系统源代码都是开源的,由不同的组织集体打造出生自带兼容性和统一标准。嵌入式软件工程师最常用的操作系统有RTOS、Linux、安卓。rtos虽然高度碎片化,各种操作系统都有,但是渐渐的大家用的都是两个规模比
- 2023-01-19终于忙得告一段落,进行年终总结一下吧
CPA小乔
由于年初结账还有各种工作挤在一起,忙的日更中断了16天了,刚刚发完这个月最后一个报告,终于忙告一段落了,进行下年终总结吧!1、全职工作方面:2022年公司业务发展很快,很多新业务,自己也跟着进步很多,进行银行融资,远期外汇风险管控,嵌入式软件即征即退,RECP等等,这也让自己的年终奖4个月增长到6个月。要相信付出总会有收获!2023年继续加油!如果有合适的机会就换一个距离家近的工作吧。2、兼职方面
- 海康威视 嵌入式 面经 海康威视嵌入式软件 嵌入式硬件总结面试经验 面试题目汇总
好家伙VCC
面试嵌入式硬件面试职场和发展
标题海康威视嵌入式面经海康威视嵌入式软件嵌入式硬件总结面试经验面试题目汇总整理总结了海康威视嵌入式的面试题目!,可以供大家面试参考标题海康威视嵌入式面经五月底投递,六月初面试,一场技术面,一场HR面,前后隔了两天一面4min23s自我介绍高考数学成绩大学哪几门课学的比较不错读不读研,能实习多久HR面20min自我介绍介绍一下你做的项目成绩排名,考研意向记不清了反问:部门做什么(机器人嵌入式应用层开
- SDI接口(总结)
winkle_Zhang
FPGA开发问题总结fpga开发vivado
大家可以关注我刚开通的公众号【FPGA开发笔记】,我每天都会更新分享发布自己在FPGA开发过程中的心得和收货,也会分享一些硬件电路、模拟IC设计、电子DIY、嵌入式软件相关的文章。一.接口定义SDI(serialdigitalinterface)数字分量串行接口,有三种不同的标准分别为标准清晰度SD-SDI、高清标准HD-SDI和3G-SDI,对应速率分别是270Mb/s、1.485Gb/s和2.
- 嵌入式软件开发之------浅析制作ARMv8 native gcc 编译器(十)
surquer
linuxgcccompilelinuxaarch64arm64nativegcccrossgcc
导读:在学习嵌入式的时候,需要搭建交叉编译环境,也就是说在PC/服务器上编译嵌入式产品用的软件。或者具体点说,很多人开发的产品是基于ARM、MIPS的嵌入式设备,在自己的电脑上或服务器(通常是X86机器)使用交叉编译工具(gcc),来编译产品软件。网上也有很多交叉编译工具链的制作,甚至还有crosstool-ng用来制作交叉编译用的gcc,如果不想自己制作,还可以下载别人制作好的工具链,比如ARM
- 基于USDT的日志优化
塵觴葉
linuxUSDT日志优化
嵌入式应用的日志管理据笔者的经验,嵌入式设备端的日志管理通常比较糟;举个例子,笔者以前统计过在一些安卓设备上,每小时安卓APP生成的日志量约为4.5GB。尽管安卓系统的日志管理系统是原生的,但这么大的日志生成量确实给设备带来比较大的负载(尤其当日志需要保存到文件中时)。这固然与嵌入式软件研发管理脱不开关系,但我们仍然需要寻找相应的解决办法——尤其对于一个没有研发管理权限的开发人员(如笔者),不可能
- 3.14-嵌入式软件实习生-面试记录
Loooqy
嵌入式面试记录面试职场和发展
经纬恒润嵌入式软件实习生面试记录自我介绍函数指针函数指针是一个指向函数的指针变量,它的本质是指针变量,但它指向的是函数的首地址。在C语言中,每一个函数在编译时都有一个入口地址,这个地址就是函数指针所指向的地址。函数指针的主要用途包括调用函数和作为函数的参数。指针函数,又称为带指针的函数,它的本质是一个函数。其特别之处在于,这个函数的返回值是一个地址值,即函数返回类型是某一类型的指针。结构体联合体概
- 嵌入式开发的3种架构
马上到我碗里来
汽车电子架构java嵌入式
嵌入式软件架构是指嵌入式软件的整体结构和设计,它决定了嵌入式软件的各个组成部分之间的关系以及它们如何相互协作。嵌入式软件架构的选择对嵌入式系统的性能、可靠性和可维护性有着重要影响。嵌入式开发中常用的三种架构是:1前后台顺序执行法前后台顺序执行法是嵌入式软件开发中最简单的一种架构。在这种架构下,程序被分为前台程序和后台程序。前台程序负责处理用户输入和输出,后台程序负责处理其他任务。前台程序和后台程序
- 嵌入式软件面试经典问题
Cash2more
嵌入式软件面试面试c++c语言软件工程
一、进程与线程(不同的系统资源管理方式)1.区别进程:资源分配的基本单位,由一个或者多个线程组成线程:调度器进行调度的基本单位,一个任务每个进程都有自己独立的内存空间,一个进程可以有多个线程,进程切换开销大多个线程共享内存,线程切换开销小一个进程崩溃不影响其他进程一个线程崩溃影响所处的整个进程2.多进程,多线程优缺点从内存占用,数据共享,同步,CPU利用率,创建销毁和切换速度,可靠性,编程调试比较
- 嵌入式软件开发应该掌握哪些知识?
华清远见成都中心
嵌入式开发语言嵌入式软件开发
嵌入式软件开发应该掌握哪些知识?一、什么是嵌入式软件?嵌入式软件通常是指嵌入式系统中运行的软件,嵌入式系统是一种特殊的计算机系统,通常用于控制、监测和数据处理等任务。嵌入式系统通常由硬件和软件两个部分组成,其中嵌入式软件是指在嵌入式系统中运行的程序,用于控制硬件并提供特定的功能和服务。嵌入式软件应用广泛,包括汽车、医疗设备、智能家居、智能穿戴、工业自动化等众多领域。二、嵌入式软件开发应掌握的知识1
- Altium Designer 软件介绍
Kilento
AltiumDesignerAltiumDesigner硬件设计
2005年年底,Protel软件的原厂商Altium公司推出了Protel系列的最新高端版本AltiumDesigner6.0。AltiumDesigner6.0是完全一体化电子产品开发系统的一个新版本,也是业界第一款也是唯一一种完整的板级设计解决方案。AltiumDesigner是业界首例将设计流程、集成化PCB设计、可编程器件(如FPGA)设计和基于处理器设计的嵌入式软件开发功能整合在一起的产
- 嵌入式软件工程师面试题(九)
嵌入式基地
牛客网嵌入式刷题专栏单片机stm32嵌入式硬件面试嵌入式面试
✅作者简介:大家好我是:嵌入式基地,是一名嵌入式工程师,希望一起努力,一起进步!个人主页:嵌入式基地系列专栏:嵌入式习题专栏微信公众号:嵌入式基地嵌入式软件工程师面试题(八)1、STM32中断是怎么进入到中断服务程序的?2、malloc和new的区别?3、为什么局部变量未赋值时,每次初始化的结果是不确定的?4、简述linux的锁机制?5、介绍下常用的gdb命令6、C++什么情况下必须用初始化列表7
- 嵌入式软件工程师经典面试题__Linux专栏
嵌入式DZC
嵌入式linux面试
资源获取链接:https://download.csdn.net/download/daizhichaoaa/79128021https://download.csdn.net/download/daizhichaoaa/79128021目录:1.磁盘使用率检测(用shell脚本)2.LVS负载均衡有哪些策略?3.谈谈你对LVS的理解?4.负载均衡的原理是什么?5.LVS由哪两部分组成的?6.与l
- 嵌入式软件工程师面试题(七)
嵌入式基地
牛客网嵌入式刷题专栏面试嵌入式面试面试题freertos单片机
✅作者简介:大家好我是:嵌入式基地,是一名嵌入式工程师,希望一起努力,一起进步!个人主页:嵌入式基地系列专栏:嵌入式习题专栏微信公众号:嵌入式基地嵌入式软件工程师面试题(七)1、简单描述一下数组指针和指针数组?2、简单描述linux设备驱动中的总线,设备和驱动的关系。3、简述一下什么是红黑树?4、指针和引用的区别?5、说说内联函数和宏函数的区别6、在FreeRTOS中,二值信号量和互斥量的区别?1
- 嵌入式软件工程师面试题(八)
嵌入式基地
牛客网嵌入式刷题专栏面试嵌入式面试面试题单片机can
✅作者简介:大家好我是:嵌入式基地,是一名嵌入式工程师,希望一起努力,一起进步!个人主页:嵌入式基地系列专栏:嵌入式习题专栏微信公众号:嵌入式基地嵌入式软件工程师面试题(八)1、在FreeRTOS中,任务通知的运行机制是怎么样的?2、什么情况下会栈溢出?如何避免?3、深复制和浅复制的区别?4、从一个源文件到可执行文件的过程?5、简述一下快速排序的步骤6、头文件的两种包含方式的区别,与""区别点击查
- 探索STM32CubeMX:图形化工具简化嵌入式软件开发
嵌入式杂谈
stm32单片机嵌入式硬件
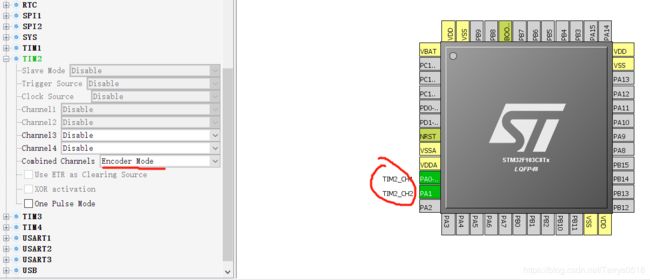
STM32CubeMX是STMicroelectronics提供的图形化工具,旨在简化嵌入式软件开发流程,特别是针对STM32系列微控制器。它提供了一种直观的方式来配置微控制器的外设和引脚,并生成初始化代码和基本工程结构。本文将探索STM32CubeMX的特性和功能,以及如何利用它简化STM32嵌入式软件开发的过程。✅作者简介:热爱科研的嵌入式开发者,修心和技术同步精进❤欢迎关注我的知乎:对err
- 嵌入式大厂面试题(2)—— 富士康
程序猿玖月柒
大厂面试题面试职场和发展面试题嵌入式
从本篇开始将会更新历年来各个公司的面试题与面经,题目来自于网上各个平台以及博主自己遇到的,如果大家有所帮助,帮忙点点赞和关注吧!岗位:嵌入式软件工程师。面试时间:30分钟。岗位职责:官网薪资:试用期基本工资7200,转正按情况加(0-1000),算月工资8000,加班有加班费,算上加班费大概9~10K,13薪。所应聘部门是基于高通平台,做通信模块的。1、自我介绍2、如何理解交叉编译?3、OSI七层
- 嵌入式大厂面试题(1)—— CVTE
程序猿玖月柒
大厂面试题面试题嵌入式大厂题目公司题春招秋招
从本篇开始将会更新历年来各个公司的面试题与面经,题目来自于网上各个平台以及博主自己遇到的,如果大家有所帮助,帮忙点点赞和关注吧!岗位:嵌入式软件工程师。面试时间:20分钟。面试1、简历中写了做过海思音视频项目,所以问了海思项目是怎么学的?(考察自学能力)。2、问:学海思项目,是因为兴趣,还是为了毕设?回答:是因为兴趣,因为自己毕设是51单片机。问:如果一个Linux和51单片机进行通讯,让我怎么设
- 风河Ido Sarig:嵌入式软件技术 加速物联网变革
weixin_34392906
后端嵌入式大数据
联网设备的与日俱增是目前全球的发展趋势,不仅仅在IT行业,甚至在我们生活工作的方方面面。如今,智能早已不是PC所独有,从手机到家电到窗帘,从自行车到咖啡杯,所有的东西都在走向互联,变得智能。无处不在的联网设备正在给我们带来翻天覆地的变化。有数据显示,2015年世界将有150亿的智能互联设备,2020年将产生35万亿的Gigabite(十亿字节)数据。这意味着当计算机和互联网成为了人类获取信息的主要
- 手把手教你用VS Code仿真调试C/C++代码
嵌入式软件实战派
C语言c语言c++python
本文首发于公众号:嵌入式软件实战派。1.PC上的IDE都2020年了,听说你还在用vc++6.0,不,可能还到处搜索下载安装巨无霸一样的visualstudio2019来调试你“鸡碎咁多”的代码?都out了,这些不是过于庞大就是编译器老掉牙了。为啥不用gcc呢?gcc不是Linux里面的吗,能用在Windows?还能debug吗?什么?你不知道Windows也可以用gcc?好吧,我今天手把手教你用
- 探索STM32CubeMX:图形化工具简化嵌入式软件开发
嵌入式杂谈
stm32嵌入式硬件单片机
STM32CubeMX是由STMicroelectronics提供的一款图形化工具,旨在简化STM32微控制器的嵌入式软件开发过程。它提供了一种快速、直观的方式来生成初始化代码并配置STM32微控制器,帮助开发人员节省宝贵的开发时间,并降低入门门槛。本文将探索STM32CubeMX的主要特性、使用方法,并附上部分示例代码。✅作者简介:热爱科研的嵌入式开发者,修心和技术同步精进❤欢迎关注我的知乎:对
- 【STM32】 HAL库+STM32CubeMX 系列教学
soledade
stm32单片机嵌入式硬件
HAL库简介STM32HAL固件库是HardwareAbstractionLayer的缩写,中文名称是:硬件抽象层。HAL库是ST公司为STM32的MCU最新推出的抽象层嵌入式软件,为更方便的实现跨STM32产品的最大可移植性。HAL库的推出,可以说ST也慢慢的抛弃了原来的标准固件库。STM32CubeMX简介STM32CubeMX是ST意法半导体近年来力推的图形化配置工具,从MCU/MPU选型,
- 史上最全嵌入式(学习路线、应用开发、驱动开发、推荐书籍、软硬件基础)
程序猿玖月柒
嵌入式面试题嵌入式学习路线嵌入式应用开发嵌入式Linux嵌入式驱动开发驱动嵌入式硬件开发
废话不多说直接上思维导图!如果有觉得图片看不清楚的,有疑问的,可在评论区进行留言!群号:228447240嵌入式总括嵌入式书籍推荐嵌入式软件知识嵌入式硬件知识嵌入式应用开发嵌入式驱动开发嵌入式视频推荐:韦东山老师!只推荐此老师一人
- 嵌入式软件工程师面试题——嵌入式专题 (五十五)
程序猿玖月柒
嵌入式面试题嵌入式面试题单片机uboot
说明:面试群,群号:228447240面试题来源于网络书籍,公司题目以及博主原创或修改(题目大部分来源于各种公司);文中很多题目,或许大家直接编译器写完,1分钟就出结果了。但在这里博主希望每一个题目,大家都要经过认真思考,答案不重要,重要的是通过题目理解所考知识点,好应对题目更多的变化;博主与大家一起学习,一起刷题,共同进步;写文不易,麻烦给个三连!!!1.什么是DDR答案:DDR全称是Doubl
- 嵌入式软件工程师面试题——嵌入式专题 (五十六)
程序猿玖月柒
嵌入式面试题面试职场和发展嵌入式面试题开发语言
说明:面试群,群号:228447240面试题来源于网络书籍,公司题目以及博主原创或修改(题目大部分来源于各种公司);文中很多题目,或许大家直接编译器写完,1分钟就出结果了。但在这里博主希望每一个题目,大家都要经过认真思考,答案不重要,重要的是通过题目理解所考知识点,好应对题目更多的变化;博主与大家一起学习,一起刷题,共同进步;写文不易,麻烦给个三连!!!1.内核如何传参答案:uboot传的是R0,
- 嵌入式软件工程师面试题——嵌入式专题 (五十七)
程序猿玖月柒
嵌入式面试题嵌入式面试题单片机嵌入式硬件嵌入式软件
说明:面试群,群号:228447240面试题来源于网络书籍,公司题目以及博主原创或修改(题目大部分来源于各种公司);文中很多题目,或许大家直接编译器写完,1分钟就出结果了。但在这里博主希望每一个题目,大家都要经过认真思考,答案不重要,重要的是通过题目理解所考知识点,好应对题目更多的变化;博主与大家一起学习,一起刷题,共同进步;写文不易,麻烦给个三连!!!1.MQTT通信过程答案:1.创建客户端2.
- 职业发展 - 一个专注于嵌入式物联网架构设计的攻城狮(转载)
VirusVIP
学习和成长嵌入式物联网程序人生职场和发展
1关于我很高兴大家都关注到我,从而看到这篇简要的介绍,下面有更多的关于我。我是一个嵌入式架构师,早前从事过智能电网相关的电力设备开发,金融POS机开发,以及eSIM相关的软件开发,现在主要在做嵌入式IoT相关的架构设计。出道至今一直从事嵌入式软件开发工作,我也是从一个助理软件工程师,一步一个脚印,进阶到初级软件工程、中级软件工程师,再到高级软件工程师,而后到现在的嵌入式架构师,不同的角色,不同的成
- 怎么样才能成为专业的程序员?
cocos2d-x小菜
编程PHP
如何要想成为一名专业的程序员?仅仅会写代码是不够的。从团队合作去解决问题到版本控制,你还得具备其他关键技能的工具包。当我们询问相关的专业开发人员,那些必备的关键技能都是什么的时候,下面是我们了解到的情况。
关于如何学习代码,各种声音很多,然后很多人就被误导为成为专业开发人员懂得一门编程语言就够了?!呵呵,就像其他工作一样,光会一个技能那是远远不够的。如果你想要成为
- java web开发 高并发处理
BreakingBad
javaWeb并发开发处理高
java处理高并发高负载类网站中数据库的设计方法(java教程,java处理大量数据,java高负载数据) 一:高并发高负载类网站关注点之数据库 没错,首先是数据库,这是大多数应用所面临的首个SPOF。尤其是Web2.0的应用,数据库的响应是首先要解决的。 一般来说MySQL是最常用的,可能最初是一个mysql主机,当数据增加到100万以上,那么,MySQL的效能急剧下降。常用的优化措施是M-S(
- mysql批量更新
ekian
mysql
mysql更新优化:
一版的更新的话都是采用update set的方式,但是如果需要批量更新的话,只能for循环的执行更新。或者采用executeBatch的方式,执行更新。无论哪种方式,性能都不见得多好。
三千多条的更新,需要3分多钟。
查询了批量更新的优化,有说replace into的方式,即:
replace into tableName(id,status) values
- 微软BI(3)
18289753290
微软BI SSIS
1)
Q:该列违反了完整性约束错误;已获得 OLE DB 记录。源:“Microsoft SQL Server Native Client 11.0” Hresult: 0x80004005 说明:“不能将值 NULL 插入列 'FZCHID',表 'JRB_EnterpriseCredit.dbo.QYFZCH';列不允许有 Null 值。INSERT 失败。”。
A:一般这类问题的存在是
- Java中的List
g21121
java
List是一个有序的 collection(也称为序列)。此接口的用户可以对列表中每个元素的插入位置进行精确地控制。用户可以根据元素的整数索引(在列表中的位置)访问元素,并搜索列表中的元素。
与 set 不同,列表通常允许重复
- 读书笔记
永夜-极光
读书笔记
1. K是一家加工厂,需要采购原材料,有A,B,C,D 4家供应商,其中A给出的价格最低,性价比最高,那么假如你是这家企业的采购经理,你会如何决策?
传统决策: A:100%订单 B,C,D:0%
&nbs
- centos 安装 Codeblocks
随便小屋
codeblocks
1.安装gcc,需要c和c++两部分,默认安装下,CentOS不安装编译器的,在终端输入以下命令即可yum install gccyum install gcc-c++
2.安装gtk2-devel,因为默认已经安装了正式产品需要的支持库,但是没有安装开发所需要的文档.yum install gtk2*
3. 安装wxGTK
yum search w
- 23种设计模式的形象比喻
aijuans
设计模式
1、ABSTRACT FACTORY—追MM少不了请吃饭了,麦当劳的鸡翅和肯德基的鸡翅都是MM爱吃的东西,虽然口味有所不同,但不管你带MM去麦当劳或肯德基,只管向服务员说“来四个鸡翅”就行了。麦当劳和肯德基就是生产鸡翅的Factory 工厂模式:客户类和工厂类分开。消费者任何时候需要某种产品,只需向工厂请求即可。消费者无须修改就可以接纳新产品。缺点是当产品修改时,工厂类也要做相应的修改。如:
- 开发管理 CheckLists
aoyouzi
开发管理 CheckLists
开发管理 CheckLists(23) -使项目组度过完整的生命周期
开发管理 CheckLists(22) -组织项目资源
开发管理 CheckLists(21) -控制项目的范围开发管理 CheckLists(20) -项目利益相关者责任开发管理 CheckLists(19) -选择合适的团队成员开发管理 CheckLists(18) -敏捷开发 Scrum Master 工作开发管理 C
- js实现切换
百合不是茶
JavaScript栏目切换
js主要功能之一就是实现页面的特效,窗体的切换可以减少页面的大小,被门户网站大量应用思路:
1,先将要显示的设置为display:bisible 否则设为none
2,设置栏目的id ,js获取栏目的id,如果id为Null就设置为显示
3,判断js获取的id名字;再设置是否显示
代码实现:
html代码:
<di
- 周鸿祎在360新员工入职培训上的讲话
bijian1013
感悟项目管理人生职场
这篇文章也是最近偶尔看到的,考虑到原博客发布者可能将其删除等原因,也更方便个人查找,特将原文拷贝再发布的。“学东西是为自己的,不要整天以混的姿态来跟公司博弈,就算是混,我觉得你要是能在混的时间里,收获一些别的有利于人生发展的东西,也是不错的,看你怎么把握了”,看了之后,对这句话记忆犹新。 &
- 前端Web开发的页面效果
Bill_chen
htmlWebMicrosoft
1.IE6下png图片的透明显示:
<img src="图片地址" border="0" style="Filter.Alpha(Opacity)=数值(100),style=数值(3)"/>
或在<head></head>间加一段JS代码让透明png图片正常显示。
2.<li>标
- 【JVM五】老年代垃圾回收:并发标记清理GC(CMS GC)
bit1129
垃圾回收
CMS概述
并发标记清理垃圾回收(Concurrent Mark and Sweep GC)算法的主要目标是在GC过程中,减少暂停用户线程的次数以及在不得不暂停用户线程的请夸功能,尽可能短的暂停用户线程的时间。这对于交互式应用,比如web应用来说,是非常重要的。
CMS垃圾回收针对新生代和老年代采用不同的策略。相比同吞吐量垃圾回收,它要复杂的多。吞吐量垃圾回收在执
- Struts2技术总结
白糖_
struts2
必备jar文件
早在struts2.0.*的时候,struts2的必备jar包需要如下几个:
commons-logging-*.jar Apache旗下commons项目的log日志包
freemarker-*.jar
- Jquery easyui layout应用注意事项
bozch
jquery浏览器easyuilayout
在jquery easyui中提供了easyui-layout布局,他的布局比较局限,类似java中GUI的border布局。下面对其使用注意事项作简要介绍:
如果在现有的工程中前台界面均应用了jquery easyui,那么在布局的时候最好应用jquery eaysui的layout布局,否则在表单页面(编辑、查看、添加等等)在不同的浏览器会出
- java-拷贝特殊链表:有一个特殊的链表,其中每个节点不但有指向下一个节点的指针pNext,还有一个指向链表中任意节点的指针pRand,如何拷贝这个特殊链表?
bylijinnan
java
public class CopySpecialLinkedList {
/**
* 题目:有一个特殊的链表,其中每个节点不但有指向下一个节点的指针pNext,还有一个指向链表中任意节点的指针pRand,如何拷贝这个特殊链表?
拷贝pNext指针非常容易,所以题目的难点是如何拷贝pRand指针。
假设原来链表为A1 -> A2 ->... -> An,新拷贝
- color
Chen.H
JavaScripthtmlcss
<!DOCTYPE HTML PUBLIC "-//W3C//DTD HTML 4.01 Transitional//EN" "http://www.w3.org/TR/html4/loose.dtd"> <HTML> <HEAD>&nbs
- [信息与战争]移动通讯与网络
comsci
网络
两个坚持:手机的电池必须可以取下来
光纤不能够入户,只能够到楼宇
建议大家找这本书看看:<&
- oracle flashback query(闪回查询)
daizj
oracleflashback queryflashback table
在Oracle 10g中,Flash back家族分为以下成员:
Flashback Database
Flashback Drop
Flashback Table
Flashback Query(分Flashback Query,Flashback Version Query,Flashback Transaction Query)
下面介绍一下Flashback Drop 和Flas
- zeus持久层DAO单元测试
deng520159
单元测试
zeus代码测试正紧张进行中,但由于工作比较忙,但速度比较慢.现在已经完成读写分离单元测试了,现在把几种情况单元测试的例子发出来,希望有人能进出意见,让它走下去.
本文是zeus的dao单元测试:
1.单元测试直接上代码
package com.dengliang.zeus.webdemo.test;
import org.junit.Test;
import o
- C语言学习三printf函数和scanf函数学习
dcj3sjt126com
cprintfscanflanguage
printf函数
/*
2013年3月10日20:42:32
地点:北京潘家园
功能:
目的:
测试%x %X %#x %#X的用法
*/
# include <stdio.h>
int main(void)
{
printf("哈哈!\n"); // \n表示换行
int i = 10;
printf
- 那你为什么小时候不好好读书?
dcj3sjt126com
life
dady, 我今天捡到了十块钱, 不过我还给那个人了
good girl! 那个人有没有和你讲thank you啊
没有啦....他拉我的耳朵我才把钱还给他的, 他哪里会和我讲thank you
爸爸, 如果地上有一张5块一张10块你拿哪一张呢....
当然是拿十块的咯...
爸爸你很笨的, 你不会两张都拿
爸爸为什么上个月那个人来跟你讨钱, 你告诉他没
- iptables开放端口
Fanyucai
linuxiptables端口
1,找到配置文件
vi /etc/sysconfig/iptables
2,添加端口开放,增加一行,开放18081端口
-A INPUT -m state --state NEW -m tcp -p tcp --dport 18081 -j ACCEPT
3,保存
ESC
:wq!
4,重启服务
service iptables
- Ehcache(05)——缓存的查询
234390216
排序ehcache统计query
缓存的查询
目录
1. 使Cache可查询
1.1 基于Xml配置
1.2 基于代码的配置
2 指定可搜索的属性
2.1 可查询属性类型
2.2 &
- 通过hashset找到数组中重复的元素
jackyrong
hashset
如何在hashset中快速找到重复的元素呢?方法很多,下面是其中一个办法:
int[] array = {1,1,2,3,4,5,6,7,8,8};
Set<Integer> set = new HashSet<Integer>();
for(int i = 0
- 使用ajax和window.history.pushState无刷新改变页面内容和地址栏URL
lanrikey
history
后退时关闭当前页面
<script type="text/javascript">
jQuery(document).ready(function ($) {
if (window.history && window.history.pushState) {
- 应用程序的通信成本
netkiller.github.com
虚拟机应用服务器陈景峰netkillerneo
应用程序的通信成本
什么是通信
一个程序中两个以上功能相互传递信号或数据叫做通信。
什么是成本
这是是指时间成本与空间成本。 时间就是传递数据所花费的时间。空间是指传递过程耗费容量大小。
都有哪些通信方式
全局变量
线程间通信
共享内存
共享文件
管道
Socket
硬件(串口,USB) 等等
全局变量
全局变量是成本最低通信方法,通过设置
- 一维数组与二维数组的声明与定义
恋洁e生
二维数组一维数组定义声明初始化
/** * */ package test20111005; /** * @author FlyingFire * @date:2011-11-18 上午04:33:36 * @author :代码整理 * @introduce :一维数组与二维数组的初始化 *summary: */ public c
- Spring Mybatis独立事务配置
toknowme
mybatis
在项目中有很多地方会使用到独立事务,下面以获取主键为例
(1)修改配置文件spring-mybatis.xml <!-- 开启事务支持 --> <tx:annotation-driven transaction-manager="transactionManager" /> &n
- 更新Anadroid SDK Tooks之后,Eclipse提示No update were found
xp9802
eclipse
使用Android SDK Manager 更新了Anadroid SDK Tooks 之后,
打开eclipse提示 This Android SDK requires Android Developer Toolkit version 23.0.0 or above, 点击Check for Updates
检测一会后提示 No update were found