ROS学习总结七:ArbotiX+rviz功能仿真
要实现这个仿真,首先需要安装一个ArbotiX功能包:
在src文件夹下新建终端:
$ git clone https://github.com/vanadiumlabs/arbotix_ros.git
注:这是kinetic版本的方式。不同版本不一定相同。
然后再回到上层文件夹:
$ cd ..
$ catkin_make
下面是正式的仿真:
由于这里用到的几个包来自于shenlan的源码,本着对知识产权的尊重,就不粘贴了,有需要的可以自己去找一下这个的资源。
这里主要用到了两个文件,首先是在ROS中启动一个小车的仿真:
$ roslaunch mbot_description arbotix_mbot_with_camera_xacro.launch
这个launch文件跟之前的差不多,具体代码如下:
<launch>
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mbot_description)/urdf/xacro/mbot_with_camera.xacro'" />
<arg name="gui" default="false" />
<param name="robot_description" command="$(arg model)" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="$(arg gui)"/>
<!-- 启动 arbotix_python 节点-->
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<!-- 加载控制器参数-->
<rosparam file="$(find mbot_description)/config/fake_mbot_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_arbotix.rviz" required="true" />
</launch>
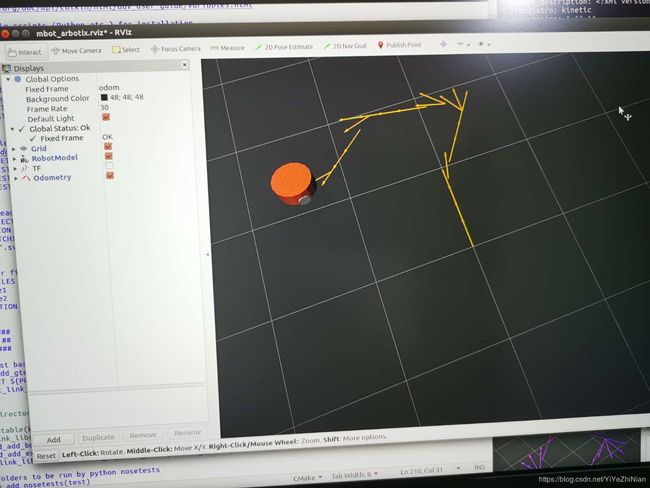
可以看出它其实跟之前的launch文件是差不多的,只是多了一个启动 arbotix_python 节点的命令,这个文件在之前下的启动 arbotix_ros中可以找到,如果这里节点启动失败可以找到该文件,右键属性查看可执行权限,python文件需要添加可执行权限才能运行。 这是一个参数配置文件,定义了一个controller。包括了控制器类型、控制的车体坐标系、轮子的间距、控制频率、PID以及加速度等参数 这个文件内容如下: 它其实只是一个调用的文件,主要起作用的是其中的一个mbot_teleop.py文件。下面是两个参数赋值,但是实际上我查看了这个python文件后发现里面并没有这个参数的调用?而我把这两行赋值去掉后整个程序也确实是没有受到任何的影响的。 例如这里的两张图片,上面是源码跑的,下面是把两行赋值去掉以后跑的,其实不影响控制效果。 说是找不到这个文件,然后我打开arbotix文件夹下确实是有这个文件夹的,里面包含了两个文件。而且这个包是GitHub上直接下载的应该不会有问题,当时搞了挺久,后来在古月居的专栏里找到了跟我遇到一样问题的小伙伴,参考链接如下: 这里面的catkin_ws为自己的包名称,不一定是这个。 其他的不做改变,同样的启动这个launch文件: 这时候你可以得到一辆之前自己写的小车: 这时候我同样是可以让车子动起来: 然后我们进入这个文件夹下的src文件夹,在src文件目录下新建一个名为teleop.py的文件,并复制下列代码: 这样我们得到一个简单的cmd_vel消息发布文本。去执行一下: 可以得到以下结果: 同时我们需要修改exper4251文件夹下的cmakelist文件,在该文件的下面添加下列代码: 这里的写法跟原博客有些不一样,因为我开始照着他那个写出现了一些问题。后来我就改成了这个写法,这个是跟总结一种写talker以及listener的cmakelist文件一样的方式。 这里应该不会有太大的问题。然后我们同样可以执行一下这个文件: 然后使用w、A、S、D等键就可以控制小车的移动了。
另外这里还有一个 controllers: {
base_controller: {
type: diff_controller,
base_frame_id: base_footprint,
base_width: 0.26,
ticks_meter: 4100,
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
accel_limit: 1.0
}
}
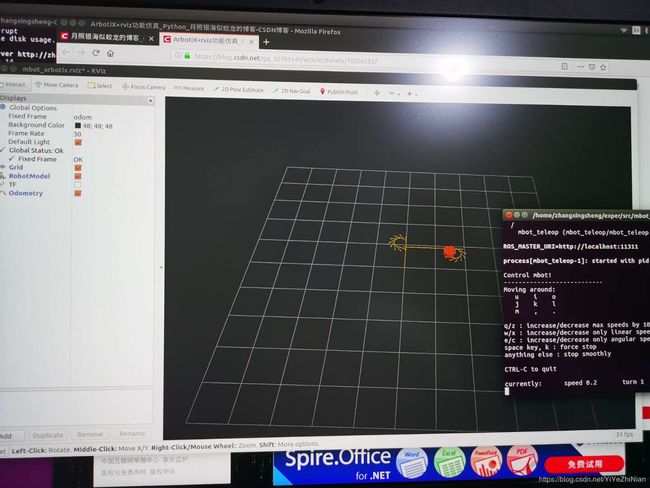
如果没有问题的话运行上面的launch文件应该能显示出一个类似于前面的简单的四轮机器人,还带了一个摄像头的。这时候我们想让机器人动起来,则需要再启动一个键盘控制节点: $ roslaunch mbot_teleop mbot_teleop.launch
<launch>
<node name="mbot_teleop" pkg="mobt_teleop" type="mbot_teleop.py" output="screen">
<param name="scale_liner" value="0.1" type="double"/>
<param name="scale_angular" value="0.4" type="double"/>
</node>
</launch>

这里在开启上一个launch文件的时候出现了一个问题:ImportError: No module named arbotix_msgs.msg
https://www.guyuehome.com/237
这里有人提到了使用rosdep install命令,但是我没试出来,我采用的是后面那个人提到的$ source ~/catkin_ws/devel/setup.bash
这样运行成功后,我们打开rqt_graph看一下:
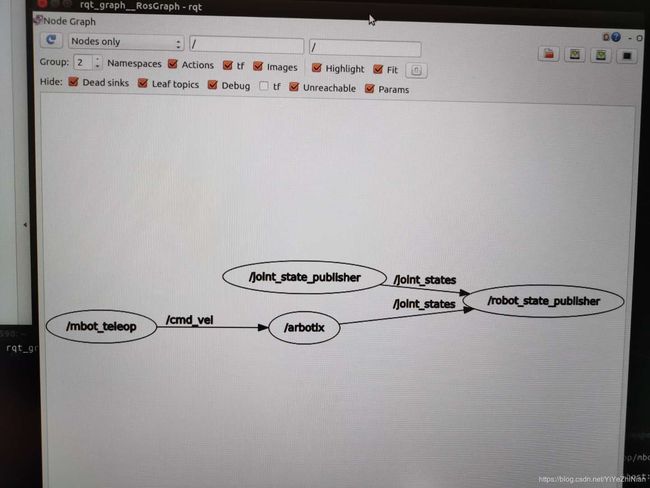
从这里大致可以看出来,键盘控制节点发布的消息是给到arbotix的,然后arbotix经过运算再发布出来给到robot_state_publisher。而我们之前使用的xacro所调用的其实都是robot_state_publisher的消息,所以从这里可以看出来一点,那就是我任意更换机器人模型本身对于消息的发布是没有影响的。那么回到最上面的launch文件,我们可以把launch文件修改为:<launch>
<arg name="model" default="$(find xacro)/xacro --inorder '$(find exper4241)/xacro/exper_xacro.xacro'" />
<arg name="gui" default="false" />
<param name="robot_description" command="$(arg model)" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="$(arg gui)"/>
<!-- 启动 arbotix_python 节点-->
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<!-- 加载控制器参数-->
<rosparam file="$(find mbot_description)/config/fake_mbot_arbotix.yaml" command="load" />
<param name="sim" value="true"/>
</node>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find exper4241)/config/mbot_arbotix.rviz" required="true" />
</launch>
$ roslaunch mbot_description arbotix_mbot_with_camera_xacro.launch
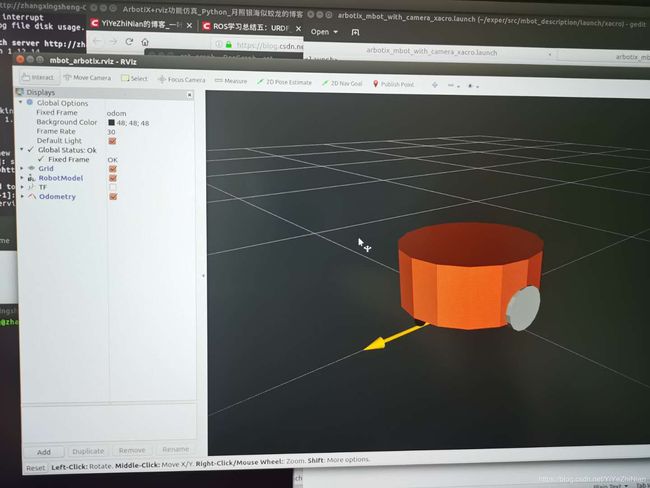
这个就是之前上一章内容里面最后完成的小车模型。然后我再去启动一个键盘节点:$ roslaunch mbot_teleop mbot_teleop.launch
第二点,既然小车可以使用自己的代码编写,那么键盘节点是否可以自己写呢,当然是可以的,接下来我们可以试一下。首先我们需要知道键盘节点发布出来的是什么样的内容,而根据shenlan的源代码其teleop的最后面发布的其实是一个twist内容的cmd_vel数据,也就是这个数据被abortix订阅了,本来想看一下具体被arbotix中的那个函数使用了,奈何函数太多找了半天没找到,当然这不重要。我们只需要知道输入是什么就可以了。既然这里给定一个cmd_vel数据就可以,那么接下来我们可以尝试以及写一个。这里我参考的是古月居的一篇博客:
https://blog.csdn.net/hcx25909/article/details/9004617
首先建立一个文件夹:$ roscreate-pkg exper4251 rospy geometry_msgs std_msgs roscpp rosmake
#!/usr/bin/env python
import roslib; roslib.load_manifest('smartcar_teleop')
import rospy
from geometry_msgs.msg import Twist
from std_msgs.msg import String
class Teleop:
def __init__(self):
pub = rospy.Publisher('cmd_vel', Twist)
rospy.init_node('smartcar_teleop')
rate = rospy.Rate(rospy.get_param('~hz', 1))
self.cmd = None
cmd = Twist()
cmd.linear.x = 0.2
cmd.linear.y = 0
cmd.linear.z = 0
cmd.angular.z = 0
cmd.angular.z = 0
cmd.angular.z = 0.5
self.cmd = cmd
while not rospy.is_shutdown():
str = "hello world %s" % rospy.get_time()
rospy.loginfo(str)
pub.publish(self.cmd)
rate.sleep()
if __name__ == '__main__':Teleop()
————————————————
rosrun exper4251 teleop.py
可以看到小车在不停的旋转运动,这说明我们的消息已经是成功的被arbotix接收并使用的。
后面还有另外一个复杂一点的使用键盘控制的代码,我们也可以试一下。
首先我们在src文件夹下新建一个keyboard.cpp文件,复制代码:#include include_directories(include ${catkin_INCLUDE_DIRS})
add_executable(keyboard src/keyboard.cpp)
target_link_libraries(keyboard ${catkin_LIBRARIES})
然后在exper文件夹下新建终端编译刚才的.cpp文件:$ cd ~/exper
$ catkin_make
$ rosrun exper4251 keyboard