Ubuntu_ROS中应用kinect v2笔记
Ubuntu_ROS中应用kinect v2笔记
个人觉得最重要的资料如下:
1.
Microsoft Kinect v2 Driver Released
http://www.ros.org/news/2014/09/microsoft-kinect-v2-driver-released.html
2.
OpenKinect
https://github.com/OpenKinect/libfreenect2
3.
code-iai
https://github.com/code-iai/iai_kinect2
测试基本效果
http://v.youku.com/v_show/id_XMTQyNDAzNTM2OA
机器人课件分享
http://pan.baidu.com/s/1eRrM4QA
rtabmap kinect2:
http://official-rtab-map-forum.67519.x6.nabble.com/rtabmap-for-kinect-v2-on-ROS-Indigo-td61.html
https://github.com/introlab
附件::
libfreenect2
Table of Contents
- Description
- Requirements
- Troubleshooting
- Maintainers
- Installation
- Windows / Visual Studio
- MacOS X
- Linux
- API Documentation (external)
Description
Driver for Kinect for Windows v2 (K4W2) devices (release and developer preview).
Note: libfreenect2 does not do anything for either Kinect for Windows v1 or Kinect for Xbox 360 sensors. Use libfreenect1 for those sensors.
If you are using libfreenect2 in an academic context, please cite our work using the following DOI:
If you use the KDE depth unwrapping algorithm implemented in the library, please also cite this ECCV 2016 paper.
This driver supports:
- RGB image transfer
- IR and depth image transfer
- registration of RGB and depth images
Missing features:
- firmware updates (see issue #460 for WiP)
Watch the OpenKinect wiki at www.openkinect.org and the mailing list at https://groups.google.com/forum/#!forum/openkinect for the latest developments and more information about the K4W2 USB protocol.
The API reference documentation is provided here https://openkinect.github.io/libfreenect2/.
Requirements
Hardware requirements
- USB 3.0 controller. USB 2 is not supported.
Intel and NEC USB 3.0 host controllers are known to work. ASMedia controllers are known to not work.
Virtual machines likely do not work, because USB 3.0 isochronous transfer is quite delicate.
Requirements for multiple Kinects
It has been reported to work for up to 5 devices on a high-end PC using multiple separate PCI Express USB3 expansion cards (with NEC controller chip). If you're using Linux, you may have to increase USBFS memory buffers. Depending on the number of Kinects, you may need to use an even larger buffer size. If you're using an expansion card, make sure it's not plugged into an PCI-E x1 slot. A single lane doesn't have enough bandwidth. x8 or x16 slots usually work.
Operating system requirements
- Windows 7 (buggy), Windows 8, Windows 8.1, and probably Windows 10
- Debian, Ubuntu 14.04 or newer, probably other Linux distros. Recommend kernel 3.16+ or as new as possible.
- Mac OS X
Requirements for optional features
- OpenGL depth processing: OpenGL 3.1 (Windows, Linux, Mac OS X). OpenGL ES is not supported at the moment.
- OpenCL depth processing: OpenCL 1.1
- CUDA depth processing: CUDA (6.5 and 7.5 are tested; The minimum version is not clear.)
- VAAPI JPEG decoding: Intel (minimum Ivy Bridge or newer) and Linux only
- VideoToolbox JPEG decoding: Mac OS X only
- OpenNI2 integration: OpenNI2 2.2.0.33
- Jetson TK1: Linux4Tegra 21.3 or later. Check Jetson TK1 issues before installation. Jetson TX1 is not yet supported as the developers don't have one, but it may be easy to add the support.
Troubleshooting and reporting bugs
First, check https://github.com/OpenKinect/libfreenect2/wiki/Troubleshooting for known issues.
When you report USB issues, please attach relevant debug log from running the program with environment variable LIBUSB_DEBUG=3, and relevant log from dmesg. Also include relevant hardware information lspci and lsusb -t.
Maintainers
- Joshua Blake [email protected]
- Florian Echtler
- Christian Kerl
- Lingzhu Xiang (development/master branch)
Installation
Windows / Visual Studio
Install UsbDk driver
- (Windows 7) You must first install Microsoft Security Advisory 3033929 otherwise your USB keyboards and mice will stop working!
- Download the latest x64 installer from https://github.com/daynix/UsbDk/releases, install it.
- If UsbDk somehow does not work, uninstall UsbDk and follow the libusbK instructions.
This doesn't interfere with the Microsoft SDK. Do not install both UsbDK and libusbK drivers
(Alternatively) Install libusbK driver
You don't need the Kinect for Windows v2 SDK to build and install libfreenect2, though it doesn't hurt to have it too. You don't need to uninstall the SDK or the driver before doing this procedure.
Install the libusbK backend driver for libusb. Please follow the steps exactly:
- Download Zadig from http://zadig.akeo.ie/.
- Run Zadig and in options, check "List All Devices" and uncheck "Ignore Hubs or Composite Parents"
- Select the "Xbox NUI Sensor (composite parent)" from the drop-down box. (Important: Ignore the "NuiSensor Adaptor" varieties, which are the adapter, NOT the Kinect) The current driver will list usbccgp. USB ID is VID 045E, PID 02C4 or 02D8.
- Select libusbK (v3.0.7.0 or newer) from the replacement driver list.
- Click the "Replace Driver" button. Click yes on the warning about replacing a system driver. (This is because it is a composite parent.)
To uninstall the libusbK driver (and get back the official SDK driver, if installed):
- Open "Device Manager"
- Under "libusbK USB Devices" tree, right click the "Xbox NUI Sensor (Composite Parent)" device and select uninstall.
- Important: Check the "Delete the driver software for this device." checkbox, then click OK.
If you already had the official SDK driver installed and you want to use it:
- In Device Manager, in the Action menu, click "Scan for hardware changes."
This will enumerate the Kinect sensor again and it will pick up the K4W2 SDK driver, and you should be ready to run KinectService.exe again immediately.
You can go back and forth between the SDK driver and the libusbK driver very quickly and easily with these steps.
Build libusb
Open a Git shell (GitHub for Windows), or any shell that has access to git.exe and msbuild.exe
cd depends/ .\install_libusb_vs2013.cmdOr
install_libusb_vs2015.cmd. If you see some errors, you can always open the cmd files and follow the git commands, and maybe buildlibusb_201x.slnwith Visual Studio by hand. Building with "Win32" is not recommended as it results in lower performance.Install TurboJPEG
Download from http://sourceforge.net/projects/libjpeg-turbo/files, extract it to
c:\libjpeg-turbo64ordepends/libjpeg-turbo64, or anywhere as specified by the environment variableTurboJPEG_ROOT.Install GLFW
Download from http://www.glfw.org/download.html (64-bit), extract as
depends/glfw(renameglfw-3.x.x.bin.WIN64toglfw), or anywhere as specified by the environment variableGLFW_ROOT.- Install OpenCL (optional)
- Intel GPU: Download "Intel® SDK for OpenCL™ Applications 2016" from https://software.intel.com/en-us/intel-opencl (requires free registration) and install it.
- Install CUDA (optional, Nvidia only)
- Download CUDA Toolkit and install it. NOTE: CUDA 7.5 does not support Visual Studio 2015.
Install OpenNI2 (optional)
Download OpenNI 2.2.0.33 (x64) from http://structure.io/openni, install it to default locations (
C:\Program Files...).Build
The default installation path is
install, you may change it by editingCMAKE_INSTALL_PREFIX.mkdir build && cd build cmake .. -G "Visual Studio 12 2013 Win64" cmake --build . --config RelWithDebInfo --target installOr
-G "Visual Studio 14 2015 Win64".- Run the test program:
.\install\bin\Protonect.exe, or start debugging in Visual Studio. Test OpenNI2 (optional)
Copy freenect2-openni2.dll, and other dll files (libusb-1.0.dll, glfw.dll, etc.) in
install\bintoC:\Program Files\OpenNI2\Tools\OpenNI2\Drivers. Then runC:\Program Files\OpenNI\Tools\NiViewer.exe. Environment variableLIBFREENECT2_PIPELINEcan be set tocl,cuda, etc to specify the pipeline.
Mac OSX
Use your favorite package managers (brew, ports, etc.) to install most if not all dependencies:
- Make sure these build tools are available: wget, git, cmake, pkg-config. Xcode may provide some of them. Install the rest via package managers.
Download libfreenect2 source
git clone https://github.com/OpenKinect/libfreenect2.git cd libfreenect2Install dependencies: libusb, GLFW
brew update brew install libusb brew tap homebrew/versions brew install glfw3Install TurboJPEG (optional)
brew tap homebrew/science brew install jpeg-turbo- Install CUDA (optional): TODO
Install OpenNI2 (optional)
brew install openni2 export OPENNI2_REDIST=/usr/local/lib/ni2 export OPENNI2_INCLUDE=/usr/local/include/ni2Build
mkdir build && cd build cmake .. make make install- Run the test program:
./bin/Protonect - Test OpenNI2.
make install-openni2(may need sudo), then runNiViewer. Environment variableLIBFREENECT2_PIPELINEcan be set tocl,cuda, etc to specify the pipeline.
Linux
Note: Ubuntu 12.04 is too old to support. Debian jessie may also be too old, and Debian stretch is implied in the following.
Download libfreenect2 source
git clone https://github.com/OpenKinect/libfreenect2.git cd libfreenect2(Ubuntu 14.04 only) Download upgrade deb files
cd depends; ./download_debs_trusty.shInstall build tools
sudo apt-get install build-essential cmake pkg-config- Install libusb. The version must be >= 1.0.20.
- (Ubuntu 14.04 only)
sudo dpkg -i debs/libusb*deb - (Other)
sudo apt-get install libusb-1.0-0-dev
- (Ubuntu 14.04 only)
- Install TurboJPEG
- (Ubuntu 14.04 and newer)
sudo apt-get install libturbojpeg libjpeg-turbo8-dev - (Debian)
sudo apt-get install libturbojpeg0-dev
- (Ubuntu 14.04 and newer)
- Install OpenGL
- (Ubuntu 14.04 only)
sudo dpkg -i debs/libglfw3*deb; sudo apt-get install -f; sudo apt-get install libgl1-mesa-dri-lts-vivid(If the last command conflicts with other packages, don't do it.) - (Odroid XU4) OpenGL 3.1 is not supported on this platform. Use
cmake -DENABLE_OPENGL=OFFlater. - (Other)
sudo apt-get install libglfw3-dev
- (Ubuntu 14.04 only)
- Install OpenCL (optional)
- Intel GPU
- (Ubuntu 14.04 only)
sudo apt-add-repository ppa:floe/beignet; sudo apt-get update; sudo apt-get install beignet-dev; sudo dpkg -i debs/ocl-icd*deb - (Other)
sudo apt-get install beignet-dev - For older kernels,
# echo 0 >/sys/module/i915/parameters/enable_cmd_parseris needed. See more known issues at https://www.freedesktop.org/wiki/Software/Beignet/.
- (Ubuntu 14.04 only)
- AMD GPU: Install the latest version of the AMD Catalyst drivers from https://support.amd.com and
apt-get install opencl-headers. - Mali GPU (e.g. Odroid XU4): (with root)
mkdir -p /etc/OpenCL/vendors; echo /usr/lib/arm-linux-gnueabihf/mali-egl/libmali.so >/etc/OpenCL/vendors/mali.icd; apt-get install opencl-headers. - Verify: You can install
clinfoto verify if you have correctly set up the OpenCL stack.
- Intel GPU
- Install CUDA (optional, Nvidia only):
- (Ubuntu 14.04 only) Download
cuda-repo-ubuntu1404...*.deb("deb (network)") from Nvidia website, follow their installation instructions, includingapt-get install cudawhich installs Nvidia graphics driver. - (Jetson TK1) It is preloaded.
- (Nvidia/Intel dual GPUs) After
apt-get install cuda, usesudo prime-select intelto use Intel GPU for desktop. - (Other) Follow Nvidia website's instructions.
- (Ubuntu 14.04 only) Download
- Install VAAPI (optional, Intel only)
- (Ubuntu 14.04 only)
sudo dpkg -i debs/{libva,i965}*deb; sudo apt-get install -f - (Other)
sudo apt-get install libva-dev libjpeg-dev - Linux kernels 4.1 to 4.3 have performance regression. Use 4.0 and earlier or 4.4 and later (Though Ubuntu kernel 4.2.0-28.33~14.04.1 has backported the fix).
- (Ubuntu 14.04 only)
- Install OpenNI2 (optional)
- (Ubuntu 14.04 only)
sudo apt-add-repository ppa:deb-rob/ros-trusty && sudo apt-get update(You don't need this if you have ROS repos), thensudo apt-get install libopenni2-dev - (Other)
sudo apt-get install libopenni2-dev.
- (Ubuntu 14.04 only)
Build
cd .. mkdir build && cd build cmake .. -DCMAKE_INSTALL_PREFIX=$HOME/freenect2 make make installYou need to specify
cmake -Dfreenect2_DIR=$HOME/freenect2/lib/cmake/freenect2for CMake based third-party application to find libfreenect2.- Set up udev rules for device access:
sudo cp ../platform/linux/udev/90-kinect2.rules /etc/udev/rules.d/, then replug the Kinect. - Run the test program:
./bin/Protonect - Run OpenNI2 test (optional):
sudo apt-get install openni2-utils && sudo make install-openni2 && NiViewer2. Environment variableLIBFREENECT2_PIPELINEcan be set tocl,cuda, etc to specify the pipeline.
IAI Kinect2
Maintainer
- Thiemo Wiedemeyer
Read this first
Please read this README and the ones of the individual components throughly before asking questions. We get a lot of repeated questions, so when you have a problem, we urge everyone to check the github issues (including closed ones). Your issue is very likely discussed there already.
The goal of this project is to give you a driver and the tools needed to receive data from the Kinect-2 sensor, in a way useful for robotics. You will still need to know how to use ROS to make use of it. Please follow the ROS tutorials. You will also need to learn how to work with point-clouds, or depth-clouds, or images (computer vision) to do useful things with the data.
Note: Please use the GitHub issues for questions and problems regarding the iai_kinect2 package and its components. Do not write emails.
Table of contents
- Description
- FAQ
- Dependencies
- Install
- GPU acceleration
- OpenCL with AMD
- OpenCL/CUDA with Nvidia
- OpenCL with Intel
- Citation
- Screenshots
Description
This is a collection of tools and libraries for a ROS Interface to the Kinect One (Kinect v2).
It contains:
- a calibration tool for calibrating the IR sensor of the Kinect One to the RGB sensor and the depth measurements
- a library for depth registration with OpenCL support
- the bridge between libfreenect2 and ROS
- a viewer for the images / point clouds
FAQ
If I have any question or someting is not working, what should I do first?
First you should look at this FAQ and the FAQ from libfreenect2.Secondly, look at issue page from libfreenect2 andthe issue page of iai_kinect2 for similar issues and solutions.
Point clouds are not being published?
Point clouds are only published when the launch file is used. Make sure to start kinect2_bridge with roslaunch kinect2_bridge kinect2_bridge.launch.
Will it work with OpenCV 3.0
Short answer: No.
Long answer: Yes, it is possible to compile this package with OpenCV 3.0, but it will not work.This is because cv_bridge is used, which itself is compiled with OpenCV 2.4.x in ROS Indigo/Jade andlinking against both OpenCV versions is not possible. Working support for OpenCV 3.0 might come with a future ROS release.
kinect2_bridge is not working / crashing, what is wrong?
There are many reasons why kinect2_bridge might not working. The first thing to find out whether the problem is related to kinect2_bridge or libfreenect2.A good tool for testing is Protonect, it is a binary located in libfreenect2/build/bin/Protonect.It uses libfreenect2 directly with a minimal dependency on other libraries, so it is a good tool for the first tests.
Execute:
./Protonect glto test OpenGL support../Protonect clto test OpenCL support../Protonect cputo test CPU support.
Before running kinect2_bridge please make sure Protonect is working and showing color, depth and ir images.If some of them are black, than there is a problem not related to kinect2_bridge and you should look at the issues from the libfreenect2 GitHub page for help.
If one of them works, try out the one that worked with kinect2_bridge: rosrun kinect2_bridge kinect2_bridge _depth_method:=.You can also change the registration method with _reg_method:=.
Protonect works fine, but kinect2_bridge is still not working / crashing.
If that is the case, you have to make sure that Protonect uses the same version of libfreenect2 as kinect2_bridge does.To do so, run make and sudo make install in the build folder again. And try out kinect2_bridge again.
cd libfreenect2/build
make & sudo make install
Also make sure that you are not using OpenCV 3.0.
If it is still crashing, compile it in debug and run it with gdb:
cd
catkin_make -DCMAKE_BUILD_TYPE="Debug"
cd devel/lib/kinect2_bridge
gdb kinect2_bridge
// inside gdb: run until it crashes and do a backtrace
run
bt
quit
Open an issue and post the problem description and the output from the backtrace (bt).
kinect2_bridge hangs and prints "waiting for clients to connect"
This is the normal behavior. 'kinect2_bridge' will only process data when clients are connected (ROS nodes listening to at least one of the topics).This saves CPU and GPU resources. As soon as you start the kinect_viewer or rostopic hz on one of the topics, processing should start.
rosdep: Cannot locate rosdep definition for [kinect2_bridge] or [kinect2_registration]
rosdep will output errors on not being able to locate [kinect2_bridge] and [kinect2_registration].That is fine because they are all part of the iai_kinect2 package and rosdep does not know these packages.
Protonect or kinect2_bridge outputs [TransferPool::submit] failed to submit transfer
This indicates problems with the USB connection.
I still have an issue, what should I do?
First of all, check the issue pages on GitHub for similar issues, as they might contain solutions for them.By default you will only see the open issues, but if you click on closed you will the the ones solved. There is also a search field which helps to find similar issues.
If you found no solution in the issues, feel free to open a new issue for your problem. Please describe your problem in detail and provide error messages and log output.
Dependencies
- ROS Hydro/Indigo
- OpenCV (2.4.x, using the one from the official Ubuntu repositories is recommended)
- PCL (1.7.x, using the one from the official Ubuntu repositories is recommended)
- Eigen (optional, but recommended)
- OpenCL (optional, but recommended)
- libfreenect2 (>= v0.2.0, for stability checkout the latest stable release)
Install
- Install the ROS. Instructions for Ubuntu 14.04
- Setup your ROS environment
Install libfreenect2:
Follow the instructions and enable C++11 by using
cmake .. -DENABLE_CXX11=ONinstead ofcmake ..If something is not working, check out the latest stable release, for example
git checkout v0.2.0.Clone this repository into your catkin workspace, install the dependencies and build it:
cd ~/catkin_ws/src/ git clone https://github.com/code-iai/iai_kinect2.git cd iai_kinect2 rosdep install -r --from-paths . cd ~/catkin_ws catkin_make -DCMAKE_BUILD_TYPE="Release"Note:
rosdepwill output errors on not being able to locate[kinect2_bridge]and[depth_registration].That is fine because they are all part of the iai_kinect2 package androsdepdoes not know these packages.Note: If you installed libfreenect2 somewhere else than in
$HOME/freenect2or a standard location like/usr/localyou have to specify the path to it by adding-Dfreenect2_DIR=path_to_freenect2/lib/cmake/freenect2tocatkin_make.Connect your sensor and run
kinect2_bridge:roslaunch kinect2_bridge kinect2_bridge.launch- Calibrate your sensor using the
kinect2_calibration. Further details - Add the calibration files to the
kinect2_bridge/data/folder. Further details - Restart
kinect2_bridgeand view the results usingrosrun kinect2_viewer kinect2_viewer kinect2 sd cloud.
GPU acceleration
OpenCL with AMD
Install the latest version of the AMD Catalyst drivers from https://support.amd.com and follow the instructions. Also install opencl-headers.
sudo apt-get install opencl-headers
OpenCL/CUDA with Nvidia
Go to developer.nvidia.com/cuda-downloads and select linux, x86_64, Ubuntu, 14.04, deb(network).Download the file and follow the instructions. Also install nvidia-modprobe and opencl-headers.
sudo apt-get install nvidia-modprobe opencl-headers
You also need to add CUDA paths to the system environment, add these lines to you ~/.bashrc:
export LD_LIBRARY_PATH="/usr/local/cuda/lib64:${LD_LIBRARY_PATH}"
export PATH="/usr/local/cuda/bin:${PATH}"
A system-wide configuration of the libary path can be created with the following commands:
echo "/usr/local/cuda/lib64" | sudo tee /etc/ld.so.conf.d/cuda.conf
sudo ldconfig
OpenCL with Intel
You can either install a binary package from a PPA like ppa:floe/beignet, or build beignet yourself.It's recommended to use the binary from the PPA.
sudo add-apt-repository ppa:floe/beignet && sudo apt-get update
sudo apt-get install beignet beignet-dev opencl-headers
Citation
If you used iai_kinect2 for your work, please cite it.
@misc{iai_kinect2,
author = {Wiedemeyer, Thiemo},
title = {{IAI Kinect2}},
organization = {Institute for Artificial Intelligence},
address = {University Bremen},
year = {2014 -- 2015},
howpublished = {\url{https://github.com/code-iai/iai\_kinect2}},
note = {Accessed June 12, 2015}
}
The result should look something similar to this (may depend on the bibliography style used):
T. Wiedemeyer, “IAI Kinect2,” https://github.com/code-iai/iai_kinect2,
Institute for Artificial Intelligence, University Bremen, 2014 – 2015,
accessed June 12, 2015.
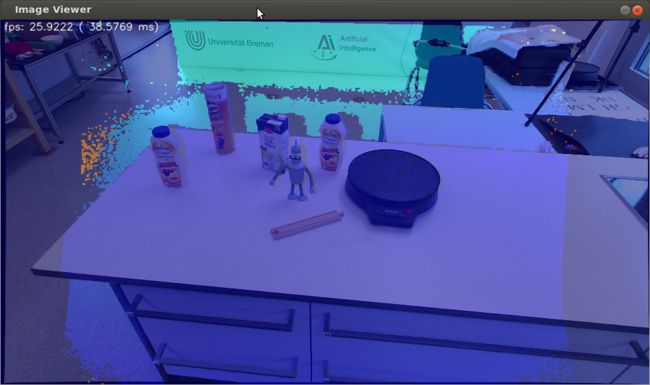
Screenshots
Here are some screenshots from our toolkit: