三维坐标系旋转——旋转矩阵到旋转角之间的换算
相关文章:
matlab相机标定获取内参
旋转矩阵到旋转角之间的换算
solvepnp 单目三维位姿估计--------利用二维码求解相机世界坐标
solvepnp 单目三维位姿估计--------理论
在做单目三维位姿估计(即估计目标物相对相机的姿态或相机相对目标物的姿态)时会用到solvepnp函数,
函数原型为:
cv2.solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs[, rvec[, tvec[, useExtrinsicGuess[, flags]]]]) → retval, rvec, tvec参数解释
-
objectPoints:世界坐标系中的3D点坐标,单位mm
-
imagePoints:图像坐标系中点的坐标,单位像素
-
cameraMatrix:相机内参矩阵
-
distCoeffs:畸变系数
-
rvec:旋转矩阵
-
tvec:平移矩阵
-
useExtrinsicGuess:是否输出平移矩阵和旋转矩阵,默认为false
-
flags:SOLVEPNP _ITERATIVE、SOLVEPNP _P3P、SOLVEPNP _EPNP、SOLVEPNP _DLS、SOLVEPNP _UPNP
内参矩阵和畸变系数都是要通过标定得到的,这个不细讲,opencv官方提供了有标定例子(或者参考我的这篇文章:用matlab标定获取相机内参矩阵和畸变系数)。函数输出的是旋转矩阵rvec和tvec。
本文就来说说得到了这个旋转矩阵rvec后,如何得知目标物实际的角度呢~
旋转矩阵是一个3×3的正交矩阵,有3个自由度。处理旋转矩阵的问题时,通常采用旋转矩阵的方式来描述,也可以用旋转向量来表示,两者之间可以通过罗德里格斯(Rodrigues)变换来进行转换。
旋转矩阵和旋转向量间的转换请参考:旋转矩阵 和 旋转向量
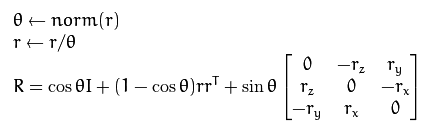
其中,旋转向量的长度(模)表示绕轴逆时针旋转的角度(弧度)。
norm为求向量的模。
代码如下:
theta = np.linalg.norm(rvec)
r = rvec / theta
R_ = np.array([[0, -r[2][0], r[1][0]],
[r[2][0], 0, -r[0][0]],
[-r[1][0], r[0][0], 0]])
R = np.cos(theta) * np.eye(3) + (1 - np.cos(theta)) * r * r.T + np.sin(theta) * R_
print('旋转矩阵')
print(R)反变换也可以很容易的通过如下公式实现:

空间中三维坐标变换一般由三种方式实现,第一种是旋转矩阵和旋转向量;第二种是欧拉角;第三种是四元数。下面介绍旋转矩阵(旋转向量)与欧拉角实现三维空间坐标变换的方法以及两者之间的关系。
旋转矩阵
对于一个三维空间的点 P(x,y,z)P(x,y,z),要将其绕 zz 轴旋转 θθ 角度是可以很简单地用旋转矩阵来表示的

欧拉角

此处得到结论:自旋转的“先转的放前面”
定角(Fixed angles)

围绕固定的坐标系转动。固定坐标系的原点,坐标系再围绕已经固定的轴转动,全程原坐标系不动。
注意!移动位置的顺序可以调换,但是旋转的顺序不能调换,结果不一样。
以X-Y-Z型为例子:即先围绕X轴进行转动γ°,然后围绕Y轴进行转动β°,最后围绕Z轴进行转动α°。注意逆时针为正方向。
X-Y-Z型公式:
重点:先转的轴的 放后面运算,如下
放后面运算,如下


代码:
def isRotationMatrix(R):
Rt = np.transpose(R) #旋转矩阵R的转置
shouldBeIdentity = np.dot(Rt, R) #R的转置矩阵乘以R
I = np.identity(3, dtype=R.dtype) # 3阶单位矩阵
n = np.linalg.norm(I - shouldBeIdentity) #np.linalg.norm默认求二范数
return n < 1e-6 # 目的是判断矩阵R是否正交矩阵(旋转矩阵按道理须为正交矩阵,如此其返回值理论为0)
def rotationMatrixToAngles(R):
assert (isRotationMatrix(R)) #判断是否是旋转矩阵(用到正交矩阵特性)
sy = math.sqrt(R[0, 0] * R[0, 0] + R[1, 0] * R[1, 0]) #矩阵元素下标都从0开始(对应公式中是sqrt(r11*r11+r21*r21)),sy=sqrt(cosβ*cosβ)
singular = sy < 1e-6 # 判断β是否为正负90°
if not singular: #β不是正负90°
x = math.atan2(R[2, 1], R[2, 2])
y = math.atan2(-R[2, 0], sy)
z = math.atan2(R[1, 0], R[0, 0])
else: #β是正负90°
x = math.atan2(-R[1, 2], R[1, 1])
y = math.atan2(-R[2, 0], sy) #当z=0时,此公式也OK,上面图片中的公式也是OK的
z = 0
return np.array([x, y, z])备注:np.linalg.norm(求范数)
举例:
由角度推旋转矩阵

由旋转矩阵推角度

欧拉角(Euler angles)

“自旋转”,围绕当下(自己)的坐标系某轴转动,就是每次旋转,都固定被围绕的某一轴,另两轴动。
每次旋转,整个坐标系都会改变位置。
以Z-Y-Z型为例的公式:
重点:先转的轴的放前面运算,如下


举例:
矩阵转角度:

注意:自旋转的“先转的放前面”
欧拉角转旋转矩阵
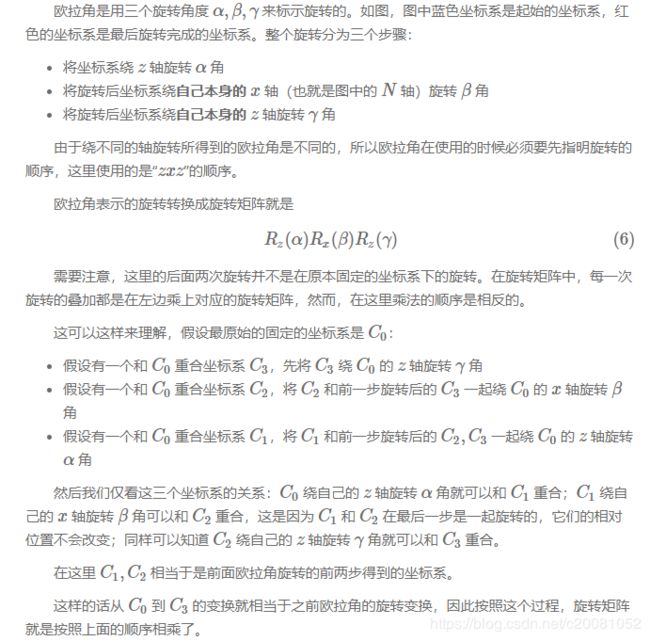
欧拉角通过将刚体绕过原点的轴(i,j,k)旋转θ,分解成三步,如下图(蓝色是起始坐标系,而红色的是旋转之后的坐标系) 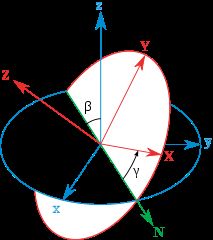
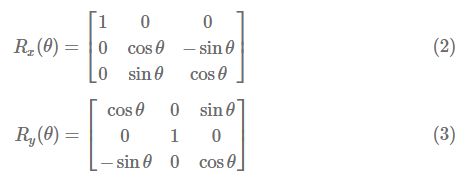
如果将每一个角度用旋转矩阵表示如下: 
所以,容易得到,欧拉角转旋转矩阵如下: 
代码:
/**
欧拉角计算对应的旋转矩阵
**/
Mat eulerAnglesToRotationMatrix(Vec3f &theta)
{
// 计算旋转矩阵的X分量
Mat R_x = (Mat_(3,3) <<
1, 0, 0,
0, cos(theta[0]), -sin(theta[0]),
0, sin(theta[0]), cos(theta[0])
);
// 计算旋转矩阵的Y分量
Mat R_y = (Mat_(3,3) <<
cos(theta[1]), 0, sin(theta[1]),
0, 1, 0,
-sin(theta[1]), 0, cos(theta[1])
);
// 计算旋转矩阵的Z分量
Mat R_z = (Mat_(3,3) <<
cos(theta[2]), -sin(theta[2]), 0,
sin(theta[2]), cos(theta[2]), 0,
0, 0, 1);
// 合并
Mat R = R_z * R_y * R_x;
return R;
}
旋转矩阵转欧拉角
将旋转矩阵表示如下: 
则可以如下表示欧拉角: 
代码:
/**
* 功能: 1. 检查是否是旋转矩阵
**/
bool isRotationMatrix(Mat &R)
{
Mat Rt;
transpose(R, Rt);
Mat shouldBeIdentity = Rt * R;
Mat I = Mat::eye(3,3, shouldBeIdentity.type());
return norm(I, shouldBeIdentity) < 1e-6;
}
/**
* 功能: 1. 通过给定的旋转矩阵计算对应的欧拉角
**/
Vec3f rotationMatrixToEulerAngles(Mat &R)
{
assert(isRotationMatrix(R));
float sy = sqrt(R.at(0,0) * R.at(0,0) + R.at(1,0) * R.at(1,0) );
bool singular = sy < 1e-6; // If
float x, y, z;
if (!singular) {
x = atan2(R.at(2,1) , R.at(2,2));
y = atan2(-R.at(2,0), sy);
z = atan2(R.at(1,0), R.at(0,0));
} else {
x = atan2(-R.at(1,2), R.at(1,1));
y = atan2(-R.at(2,0), sy);
z = 0;
}
return Vec3f(x, y, z);
}
旋转向量转欧拉角(经过四元数)代码如下:
# 从旋转向量转换为欧拉角
def get_euler_angle(rotation_vector):
# calculate rotation angles
theta = cv2.norm(rotation_vector, cv2.NORM_L2)
# transformed to quaterniond
w = math.cos(theta / 2)
x = math.sin(theta / 2)*rotation_vector[0][0] / theta
y = math.sin(theta / 2)*rotation_vector[1][0] / theta
z = math.sin(theta / 2)*rotation_vector[2][0] / theta
ysqr = y * y
# pitch (x-axis rotation)
t0 = 2.0 * (w * x + y * z)
t1 = 1.0 - 2.0 * (x * x + ysqr)
print('t0:{}, t1:{}'.format(t0, t1))
pitch = math.atan2(t0, t1)
# yaw (y-axis rotation)
t2 = 2.0 * (w * y - z * x)
if t2 > 1.0:
t2 = 1.0
if t2 < -1.0:
t2 = -1.0
yaw = math.asin(t2)
# roll (z-axis rotation)
t3 = 2.0 * (w * z + x * y)
t4 = 1.0 - 2.0 * (ysqr + z * z)
roll = math.atan2(t3, t4)
print('pitch:{}, yaw:{}, roll:{}'.format(pitch, yaw, roll))
# 单位转换:将弧度转换为度
Y = int((pitch/math.pi)*180)
X = int((yaw/math.pi)*180)
Z = int((roll/math.pi)*180)
return 0, Y, X, Z在3D 空间中,表示物体的旋转可以由三个欧拉角来表示:
pitch围绕X轴旋转,叫俯仰角。
yaw围绕Y轴旋转,叫偏航角。
roll围绕Z轴旋转,叫翻滚角。
这三个角的顺序对旋转结果有影响。 
(欧拉角与四元数的转换关系:
http://www.cnblogs.com/wqj1212/archive/2010/11/21/1883033.html)
四元数到欧拉角的转换公式如下:

arctan和arcsin的结果为[-pi/2,pi/2],不能覆盖所有的欧拉角,因此采用atan2代替arctan:

参考:http://blog.miskcoo.com/2016/12/rotation-in-3d-space
https://blog.csdn.net/aic1999/article/details/82415357#commentBox
https://www.cnblogs.com/aoru45/p/9781540.html
https://blog.csdn.net/u012423865/article/details/78219787#commentsedit
https://blog.csdn.net/u013512448/article/details/77804161