Apollo进阶课程 ② | 开源模块讲解(上)
目录
1)无人驾驶车介绍
2)高精地图
3)定位
4)感知
5)轨迹规划
6)控制
7)云端
原创: 阿波君 Apollo开发者社区 1周前
Apollo自动驾驶进阶课程是由百度Apollo联合北京大学共同开设的课程,邀请百度Apollo开放平台研发团队的中美专家联合讲授。
上一期,我们为大家推送了课程第①讲——《自动驾驶行业概述》。本周,阿波君根据Apollo产品负责人David.Zhou所讲授的第二课《Apollo开源模块讲解(上)》进行了要点整理,方便更多未到现场/没有时间观看视频的老铁们阅读。
话不多说,欢迎各位开发者一起进入进阶课程第二期。

1)无人驾驶车介绍

无人驾驶对安全精度和各种复杂技术的集成程度要求非常高,因此到目前为止,在民用领域里,无人驾驶车辆的技术难度之高是数一数二的。
做一辆无人驾驶车肯定要比做一个手机APP要复杂很多倍。无人驾驶车到底包括哪些核心技术呢,接下来我将为大家一一讲解。

备受大家热捧的无人驾驶车并不是一辆普通的车,因为无人驾驶的车一定要是线控车。所谓线控(by-wire),就是说这个车是能被电脑控制的。车的方向盘和轮子之间是有电机连接的,方向盘传动到电机上,然后电机去控制车轮,这样的话电脑就可以通过控制电机的方式来控制这个车轮。
为了保证无人驾驶车的安全性,当它在路上行驶的时候,必须做到它跟云端是有连接的。无人驾驶车并不需要时时跟云端汇报接下来会如何处理,而是要告诉云端它的位置以及行驶规划。
2)高精地图

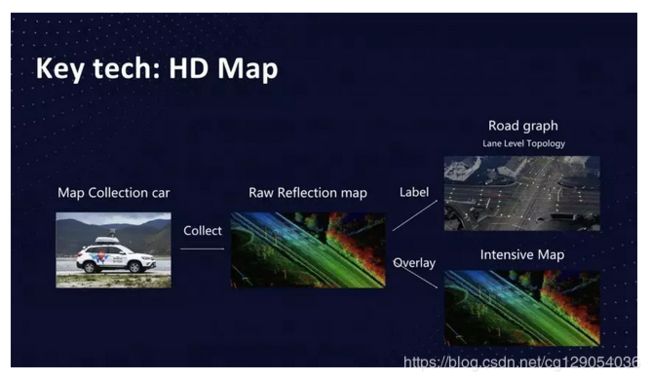
对于无人驾驶来说,在马路上行驶一定要有高精地图,这里所说的高精地图跟我们平时开车用的导航地图有什么不同呢?
所谓的导航地图就是我们平时使用的百度地图、谷歌地图等,在导航地图上,它会告诉你怎么从A点到B点,然后有几条路,预计需要用多长时间等信息。
而高精地图相对于导航地图来说,最大的特点就是高精度,它是需要做到车道线级别的。也就是说,高精地图不光要知道你在哪条路上,还需要知道你在这个路的哪条车道线上,因为只有这样才能准确地告诉无人驾驶车应该在哪个车道行驶,接下来应该怎么拐。
高精地图对于无人车来说,具有非同寻常的价值。
第一,高精地图能够给无人车很多预判的空间。当无人车通过高精地图知道前方的路况和交通标识信息后,能够提前做行驶规划,保证了行车的平稳性和经济性。
第二,高精地图能够帮助无人车减少计算量。当无人车需要通过路口时,它需要提前感知前方信号灯的状态,这时高精地图就可以帮助它定位到信号灯所在的特定区域,从而有效降低了全范围扫描识别的计算量。
除此以外,高精地图将道路及周围的所有静态障碍物进行收集,减少无人车对静态障碍物的算法处理。
3)定位

无人车有了高精地图之后,还需要知道它在地图的什么位置,这里就需要使用定位技术。说到定位,很多人可能最先想到GPS。那么GPS定位的原理是什么呢?其实GPS定位原理实际上就是一个相对定位。
每个卫星会不停地发电磁波,当收到电磁波信号之后,根据收到信号的时间与光速算出和卫星之间的距离。有了与四个卫星的距离之后,就可以解一个方程算出所在位置。但由于电离层、反射作用等因素的干扰,GPS定位是有误差的,它的精度只能达到米级。对于无人车来说,米级的定位精度是不安全的,为了解决无人车定位问题,还需要其他技术。
GPS定位还有一个问题,它是跳动的。GPS定位是每时每刻根据当前的时间去算的,容易出现计算结果不准的情况。为了抹平GPS的跳变,需要用到IMU(惯性导航),一般来说GPS和IMU是一块用的,GPS不停的去给IMU一个方向去校准,然后IMU再给GPS一个方向。
除此之外,无人车在接收不到GPS信号的情况下,需要用到另一个技术——几何定位。
几何定位的原理和GPS原理差不多,就是在道路上选几个feature,根据这些feature计算无人车所在的位置。几何定位的精度很高,可以精确地算出无人车所在的位置。所以,目前比较流行的定位技术就是GPS、IMU和几何定位等一系列技术的融合。
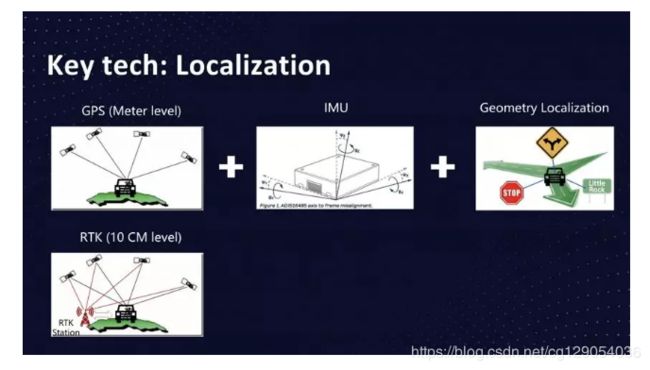
为了提高GPS的定位精度,大家又在GPS的基础上发明了RTK技术。手机GPS定位中,手机就是一个移动站,它会经常变动位置。这里所说的RTK,是一个静止站,它同样也收到卫星的信号。无人车与RTK相隔不太远的情况下,对二者之间的干扰信号用差分抹平,就可以认为无人车和RTK收到的信号是一样的。
RTK的应用能让GPS的定位精度达到10厘米,但是RTK技术的应用有个限制,它要求基站与车的距离要在16公里以内。
4)感知

我们人类天生具备感知外界的能力,是因为我们具备各种“传感器”。
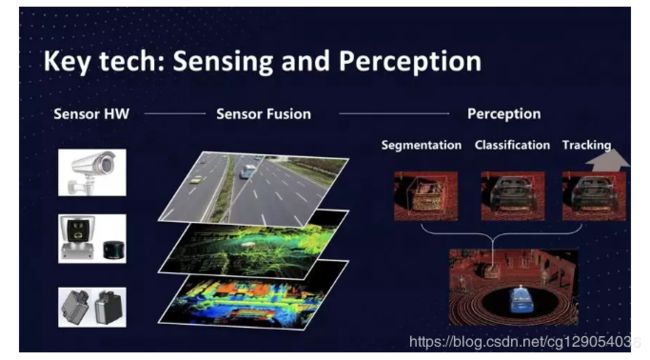
无人车想在道路上安全行驶,也必须具备属于它自己的各类传感器去感知外界环境。目前,无人车主要的传感器有摄像头(Camera)、雷达(Radar)和激光雷达(Lidar)。

对于无人车来说,观察信号灯以及一些交通标识都需要对颜色识别。
摄像头恰能解决这个问题,它的主要优点是能够辨别颜色,但是它没有对距离的判断的能力。因此,实现无人车对外界的感知还需要其他传感器的配合。

雷达是无人车比较重要的传感器之一,它是利用电磁波探测目标的电子设备。
雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。雷达的应用场景是全天候的,由于电磁波可以饶过一些东西,所以它的准确性并不太高。
雷达还有一个特点,它对于速度判断非常准,而对于静态物体的误报比较多。

激光雷达是目前无人车发展的一个比较核心的技术,它是以发射激光束探测目标的位置、速度等特征量的雷达系统。
激光雷达工作原理是向目标发射探测信号,然后将接收到的从目标反射回来的信号与发射信号进行比较,作适当处理后,就可获得目标的有关信息。
激光雷达的最大优点就是对距离的判断非常精准,但它也有个很大的缺点,就是对环境的要求非常高,比如在雾霾天气里激光雷达的精准度就会降低很多。

激光雷达是一个非常新的技术,在发展无人车之前,它并没有大规模的商业应用场景,因此它的价格非常昂贵。虽然目前激光雷达价格很贵,但它的种类还是挺多的。
大家可能见过无人车上有个不停旋转的Lidar,这种是机械雷达。由于它需要不停旋转,它本身也又大又重,机械损耗较大,容易出现问题。基于机械雷达,大家又发明了一些新的激光雷达,比如MEMS lidar、flash lidar等。
无人车收到各种传感器获取的信息之后,还需要做传感器融合。所谓传感器融合,就是要把每个传感器看到的东西全部都叠加在一起。当所有传感器看到的信息综合在一起,无人车才能够更加全面具体地感知外界环境。
5)轨迹规划

当车辆在路上行驶时,通过传感器获取了周围的信息,接下来就需要知道如何反应。
对于周围的车辆或其他障碍物,无人车是需要避让还是需要停下来,或者需要超越等等,这些都属于约束条件。无人车需要在所有的约束条件中,规划出一条可以走的路线。
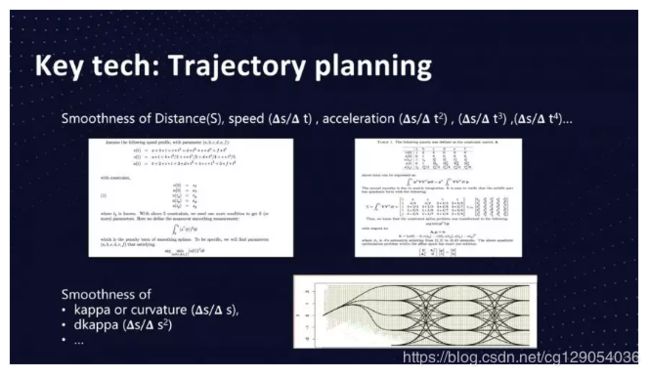
无人车的轨迹规划:
一是要满足所有的约束条件。
二是要保证车辆运动的平滑。所谓平滑,是要保证车子的速度不能跳变。
在此基础上,车子的加速度也需要是平滑的。
最终目的是,在人类可感知的范围,车子行驶是顺畅的,没有不平滑不顺的情况。
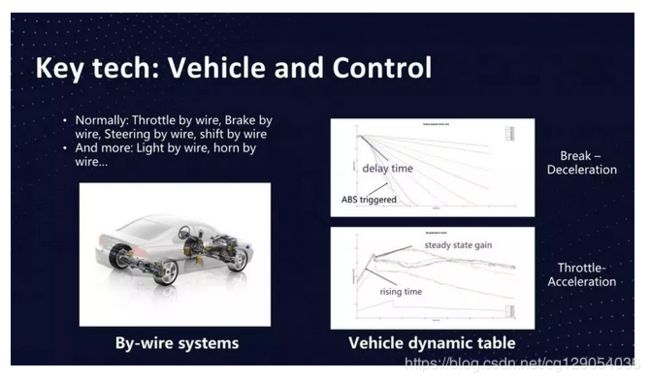
6)控制

前面我们已经提到,无人车是线控车,而不是一个仅有齿轮组成的集合体。
实现对无人车的控制,我们需要知道踩刹车和减速的关系、踩油门和加速的关系等,当无人车拿到一些控制学参数后,就可以实现电脑对无人车的控制。
7)云端

想要保证无人车是非常安全的,我们必须做到让每一辆无人车成为“有经验的司机”。所谓有经验,就是见过很多路况并且知道如何处理这些路况。
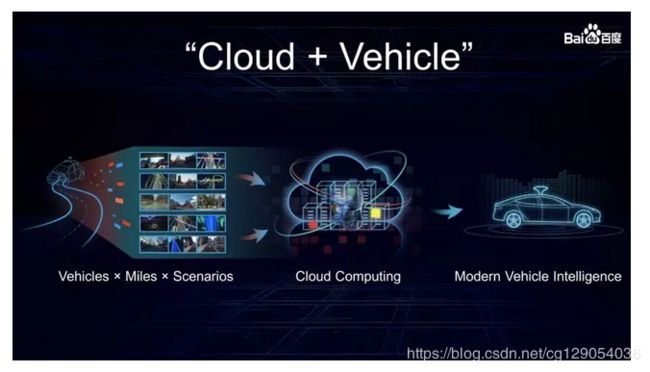
百度在云端后台有个巨大的仿真空间,每一辆无人车可以将自己遇到的复杂路况上传到云端,因此网上就有了一个非常大的数据库。
当无人驾驶的算法有更新时,就可以在云端的仿真场景中跑一下,检验是否能够应对云端的这些路况。这个步骤,就是为了确保每个无人车都称得上是“有经验的司机”。

阿波君说:
在学习过程中,开发者不仅可以在Apollo开发者社区小程序上对课程内容进行提问,还可以在开发者微信群中交流学习心得,共同学习自动驾驶技术。
开发者社区还将在公众号上定期推送课程相关的技术干货,全程陪伴大家共同进步。祝Apollo开发者们顺利完成《Apollo自动驾驶进阶课程》的学习,在自动驾驶道路上越走越远!
阿波君还欢迎大家在小程序内晒出学习笔记,也可以加入开发者交流社群与大家交流互动,有好礼相送!

