58 张图,手把手教会你 Simscape Multibody 物理建模与刚体变换!


作者 | 安布奇
责编 | 胡巍巍
本文干货满满,主要以一个单摆为例,讲述如何进行物理建模。58张实操图,手把手带你学会Simscape Multibody物理建模与刚体变换!

创建模型
在MatLab命令行输入smnew,打开一个新的simscape multibody项目。

在命令行输入sm_lib,打开Simscape Multibody block library选择自己想要添加的块。


创建机械连接
块类型说明:
Rigid Transform(刚体变换)块:提供端坐标系。
Solid(立体)块:提供几何(geometry),惯性(inertia),颜色(color)特性。
Rigid Transform块在Frame and Transform 下,Solid块在Body Element下。
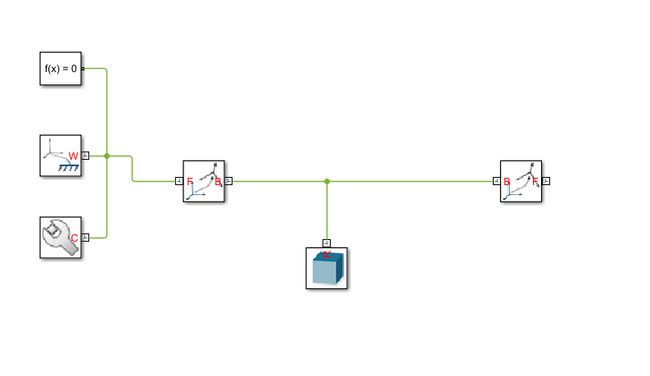
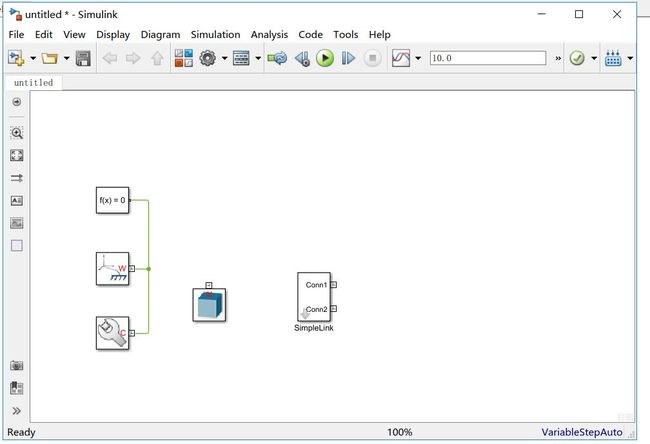
连接块图:
设置Solid block 特性:
左键快速单击solid block两次,在弹出的对话框中将参数设置为如下图所示:
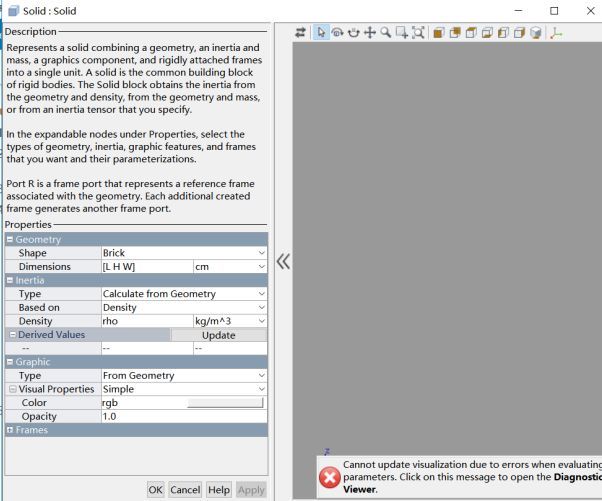
将长宽高用变量LHW代替,密度用rho代替,颜色用rgb代替,方便修改参数。这里出现错误是因为我们输入的变量未定义,将在下面定义。

设置Rigid Transform块:
左键快速单击Rigid Transform block,在弹出的对话框中将参数设置为如下图所示:
将Rigid Transform 设置为如下图所示:

将Rigid Transform1 设置为如下图所示:

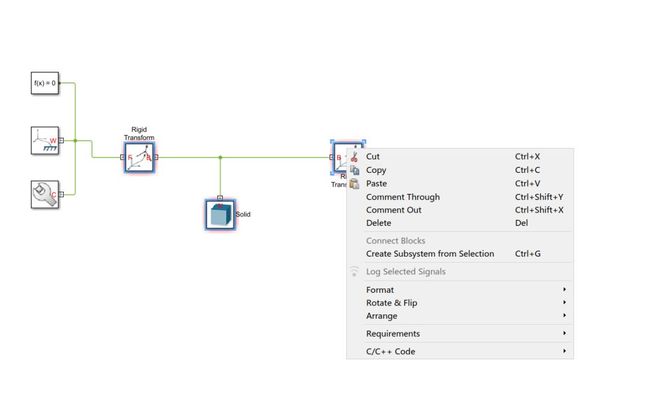
生成子系统:
同时选中Rigid Transform,Rigid Transform1和solid block,在高亮的地方右键选择Create Subsystem from Selection:
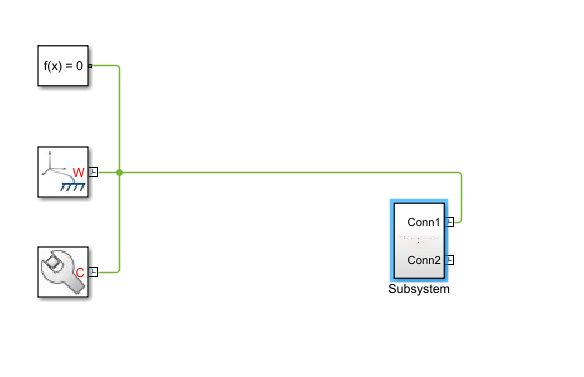
得到如下所示子系统:
定义前面的参数:
右键单击Subsystem,在弹出的对话框中选择 Mask > Create Mask。

在弹出的对话框中选择 Parameters & Dialog,在左边的栏中添加五个 ![]() 到 Parameters,然后将变量名改为前面输入的变量名。
到 Parameters,然后将变量名改为前面输入的变量名。
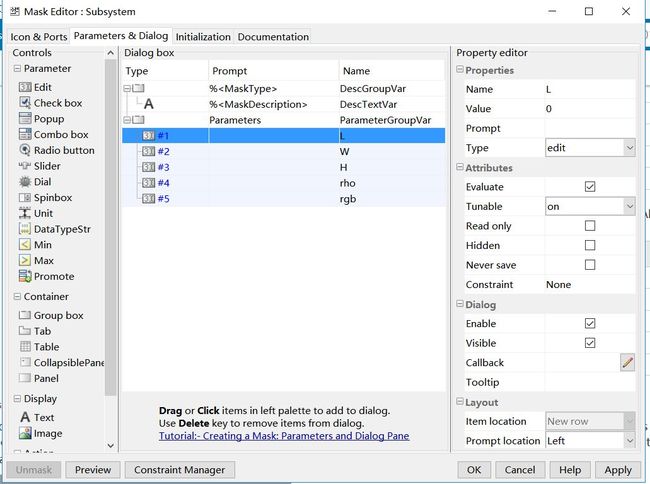
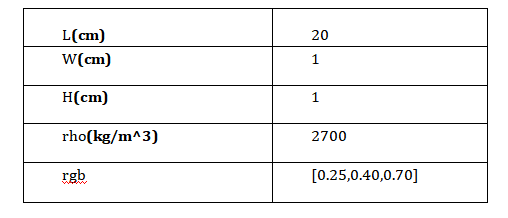
在右边栏Properties > value中将各变量值设置为如下所示:
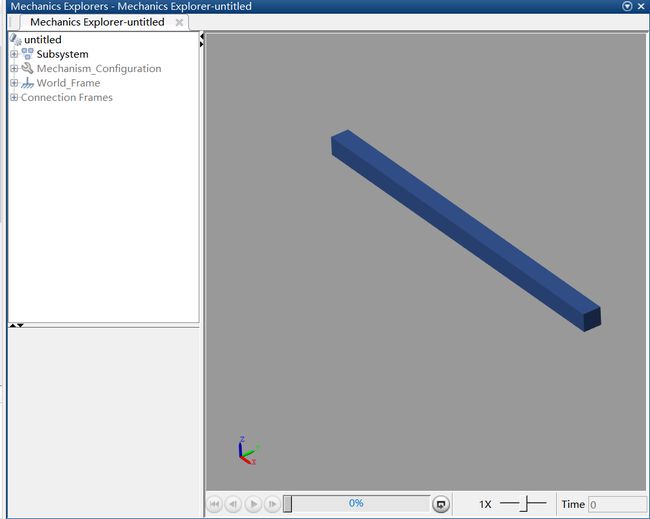
确定,然后在simulink界面中选择Simulation > Update Diagram,更新块图,得到如下图的立体:
添加旋转部件:
在matlab命令行输入smnew,新建一个模型,删除不需要的块并将上述的Subsystem复制过来。
从Simscape > Multibody > Joints 中添加一个 Revolute Joint(旋转节点)到图中,并连接成如下图所示:

鼠标左键快速单击图中的solid block两次,在弹出的对话框中将其参数设置为如图所示:

点击确定。
设置重力:
旋转节点(Revolute Joint block)使用底座和从动件坐标系的公共Z轴作为旋转轴,为了让从动件在重力的作用下旋转,需要使重力矢量偏移Z轴。鼠标左键快速单击Mechanism Configuration block两次,在弹出的窗口中将重力设置为[0 -9.81 0](-y方向)。

设置单摆起始位置:
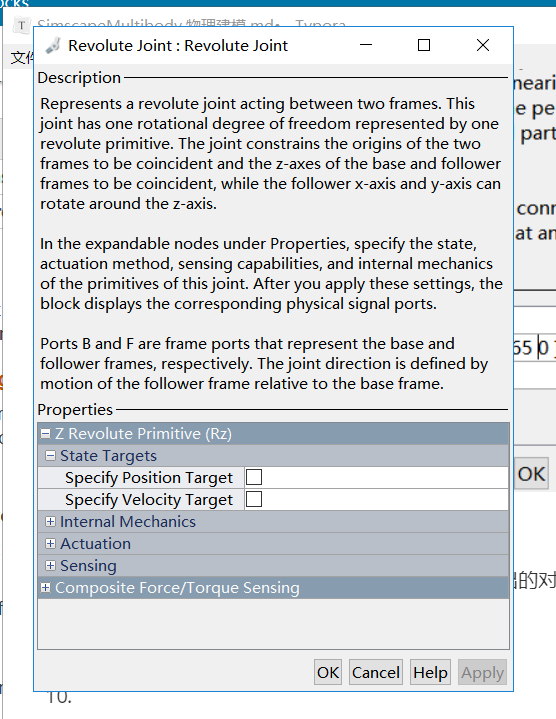
鼠标在左键快速单击Revolute Joint两次,在弹出的对话框中选择State Targets > Position进行设置,默认为水平。
配置求解器:
在simulink中选择Simulation > Model Configuration Parameters,配置为如下图所示:

选择确定。
组装模型:
选择Simulation > Update diagram,得到如图所示的模型。

选择View convention将其设置为Y up (XY Front),保证重力与屏幕垂直对齐,选择view > standard view 中的一项来刷新视图。选择 ![]() 来保存设置。
来保存设置。
运行模型:
点击Simulation > Run,运行模型,将会看到单摆摆动。
分析模型:
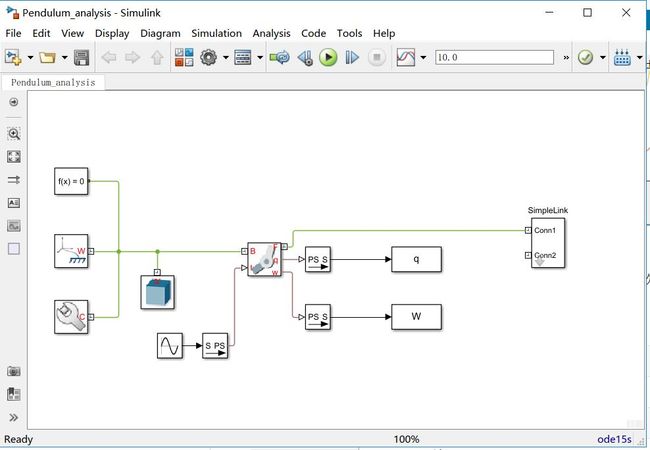
测量单摆运动:左键快速单击Revolute Joint block两次,在弹出的对话框中选择Sensing 下的Position 和Velocity。

添加以下块到模型:
PS-Simulink Converter:在Simscape > Utilities
To Workspace:在Simulink > Sinks
如图:

将文件另存为一个新文件 simplependulumanalysis。
摆角、角速度关于时间的函数:
打开刚刚的文件 simplependulumanalysis ,然后选择Simulation > Run,在matlab命令行中输入以下命令:
figure; % Open a new figure
hold on;plot(q); % Plot the pendulum angleplot(W); % Plot the pendulum angular velocity
hold on;
plot(q); % Plot the pendulum angle
plot(W); % Plot the pendulum angular velocity
得出摆角(蓝色)与角速度(红色)关于时间的函数图像:

无阻尼条件下摆角与角速度关系
在matlab命令行中输入以下命令:
figure;
plot(q.data, W.data);
plot(q.data, W.data);
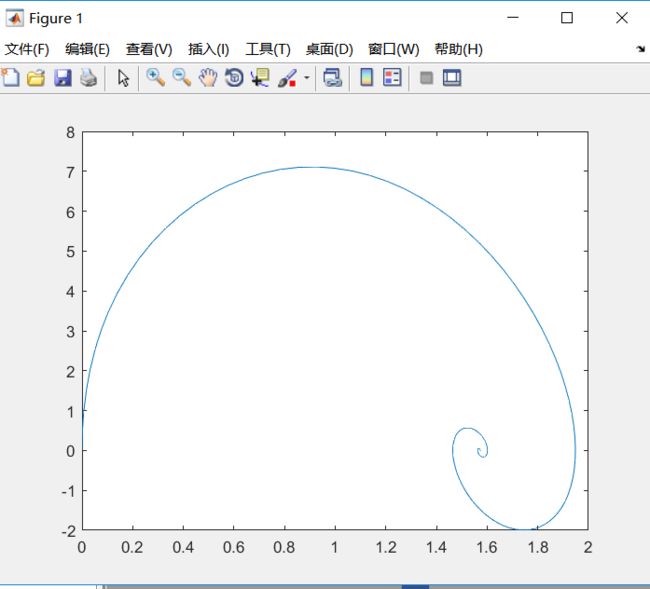
得到函数图像:纵轴为角速度,横轴为摆角。

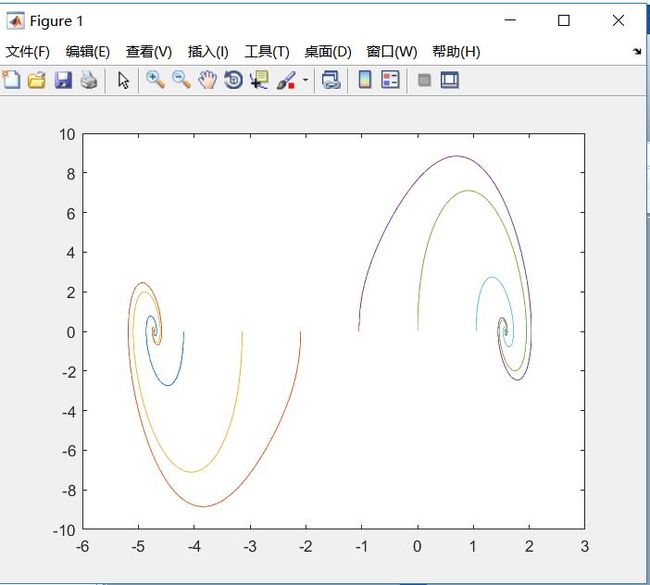
在 Revolute Joint block State 对话框的Targets> Position中设置不同的起始角:-80, -40, 0, 40和80 °,重复上述的命令得到不同起始角下摆角与角速度的关系:

有阻尼下摆角与角速度关系:
左键快速单击Revolute Joint block,在弹出的对话框中将 Internal Mechanics > Damping coefficient 设为8e-5(N*m)/(deg/s),确保State Targets > specify Position Target > Value为0(初始角为0)。
在matlab命令行输入以下命令:
figure;
hold on;plot(q);plot(w);
hold on;
plot(q);
plot(w);
得到如下图所示摆角(蓝色)、角速度(红色)与时间的函数关系:

在matlab命令行中输入以下命令:
figure;
plot(q.data, W.data);
plot(q.data, W.data);
得到摆角与角速度的关系。
改变初始角为-240,-180, -120, -60, 0, and 60 °,重复上述命令可以得到如图:
有阻尼和激励下的单摆:
左键快速单击Revolute Joint两次,在弹出来的对话框中设置Actuation > Torque为 `Provided by Input。
添加以下两个模块:

连接成如下图所示:
左键快速单击Sine Wave block 两次,在弹出的对话框中将Amplitude设置为0.06,在Revolute Joint block 对话框中将确认 State Targets > Position > Value为0。
运行仿真,在matlab命令行中输入以下命令画出摆角、角速度与时间的关系:
figure;hold on;plot(q);plot(w);
hold on;
plot(q);
plot(w);
如下图所示:

在matlab命令行中输入以下命令画出摆角与角速度的函数关系:
plot(q.data, W.Data);q.data, W.Data);
如下图所示:


Simscape刚体变换
创建坐标系:
以一个L梁作为示例,在matlab命令行输入smdoc_lbeam_inertia。
将会弹出一个L梁的坐标关系图:

左键快速点击图中的立方体两次,弹出立体对话框:

点击Frames左边的“+”号,选择new frame右边的加号。

会弹出一个坐标对话框。
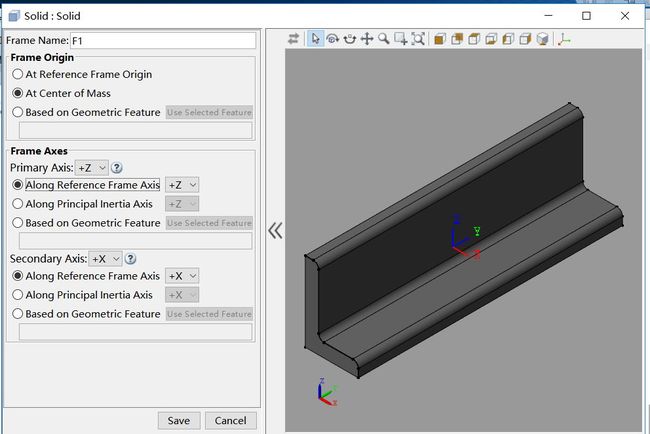
从上到下依次为:
-
坐标名称
-
坐标原点
-
主轴
-
副轴
按自己想要的设置即可。
这几个Python技能实战,能让你少些1000行代码!
https://edu.csdn.net/topic/python115?utm_source=csdn_bw

添加立体到模型中
打开simulink:
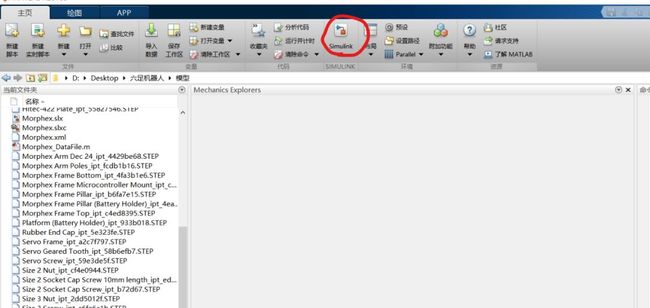
选择Simscape下的Multibody:
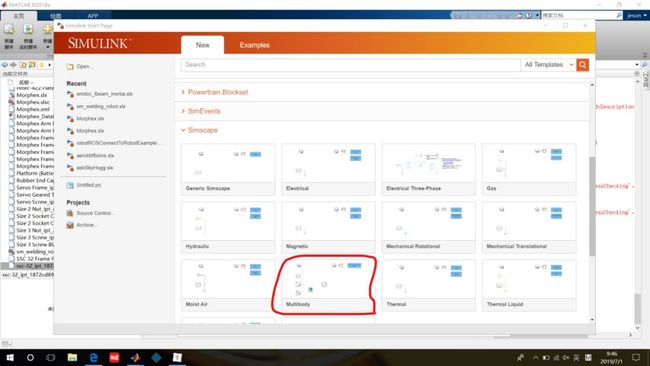
将默认存在的块体删除,选择Library Browser >> Simscape >> Multibody >> Body Elements:


将其中的solid拖到窗口中即可。


建立坐标系及刚体变换
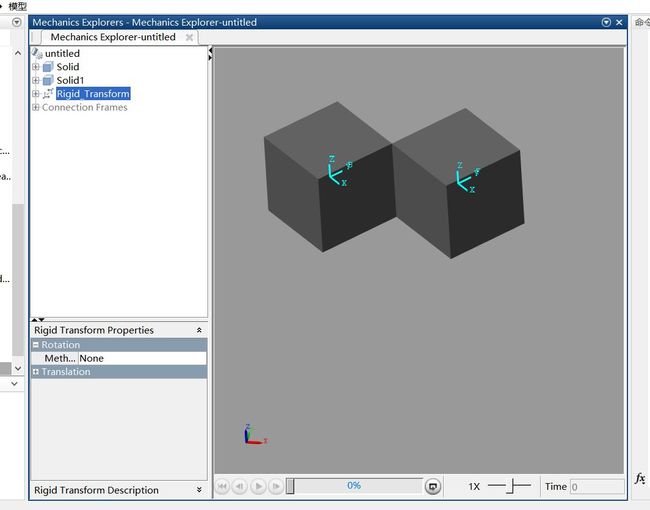
刚体转动变换:将两个立方体连接起来,使立方体的世界坐标系在空间上是重合的。

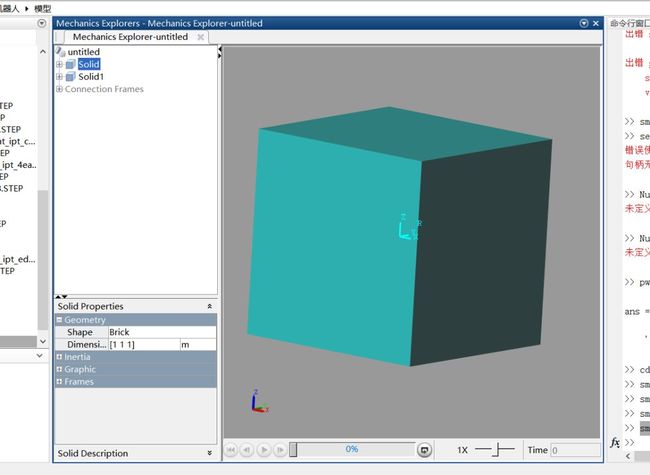
可视化立体坐标系:将Simscape >> Utilities >> Solver Configuration 拖到模型中,并与一个立方体连接:

选择Simulation > Update Diagram更新流程图,将会打开Mechanics Explorer窗口
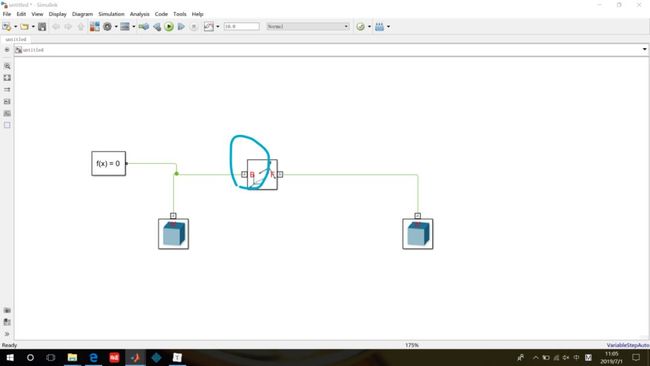
应用刚体变换:在Multibody>Frames and Transforms拖一个rigid Transform,将它连接到两个立体的中间,左键快速单击两次,在弹出对话框中选择:
Rotation > Method to Standard Axis.
Rotation > Axis to -Z.
Rotation > Angle to 45.

选择OK然后Simulation > Update Diagram更新流程图,如下图,完成了一个刚体转动变换。
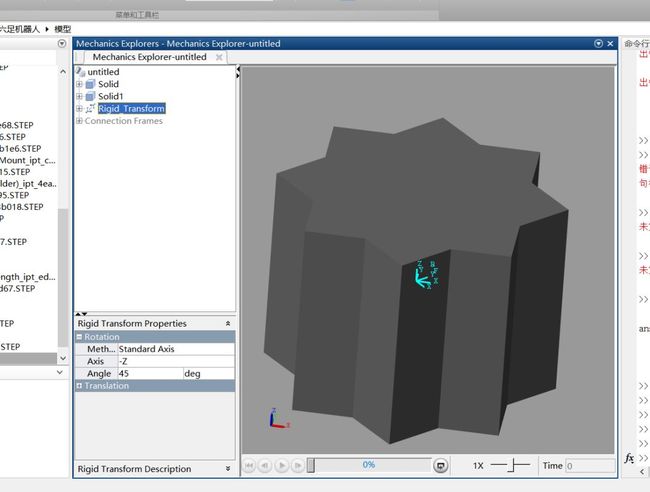
点击Rigid Transform 可以看到,两个立体的坐标系原点和Z轴是重合的,X轴和Y轴彼此错开了45°。
平动变换:将Translation > Method 设置为 Cartesian,Translation > Offset to [1 1 0]。

offset数组表示相对于基础坐标系(Base Frame,就是与变换块“B“接口相连的立体坐标系)在x,y,z方向上的偏移量,后面的是单位。
选择OK然后Simulation > Update Diagram更新流程图,如下图,完成了一个刚体平移变换。
作者简介:单雨,90后工科男,伪文艺青年。目前就读于北京理工大学宇航系,喜欢研究AI,网络爬虫,微信小程序以及机器人,痴迷于Coding,睡前必撸码。
【End】

热 文 推 荐
为什么超 80% 的开源开发者苦苦挣扎在贫困线?
☞麒麟 810 实体芯片亮相;1325 个安卓应用私自搜集数据;Linux Kernel 5.2 发布 | 极客头条
人工智能 60 年技术简史
☞2019年技术盘点容器篇(三):阿里专家谈容器:既叫好又叫座? | 程序员硬核评测
☞微软洪小文:AI将成为人类未来最好的左脑
6月Top 20榜单出炉啦! 万万没想到区块链大佬竟在忙这个...
☞干货 | Python后台开发的高并发场景优化解决方案
☞泪目!Linux之父:我就是觉得苹果太没意思!
 点击阅读原文,输入关键词,即可搜索您想要的 CSDN 文章。
点击阅读原文,输入关键词,即可搜索您想要的 CSDN 文章。
 你点的每个“在看”,我都认真当成了喜欢
你点的每个“在看”,我都认真当成了喜欢