ROS 运行rosdep 报错 ModuleNotFoundError: No module named 'rosdep2',运行roscore 报错 No module named 'defuse
在运行rosdep init的是发现会报错 "ImportError: No module named 'rosdep2'"
纠结了很久才想起来,之前几天调试opencv,其中把python默认版本切换成了python3.5
查资料发现catkin使用的是python2.7,所以导致了不兼容的问题。
解决方法
在ROS网站上发现了相似的问题
how to define ROS kinetic to use python3 instead of python2.7?
发现ROS对Python的支持还不好,所以还是用Python2.7吧。
Ubuntu中安装了好几个个Python的版本,参考网上的方法设置可以手动切换。
update-alternatives --list python 查看系统的python版本有哪些
起初执行上述命令是没有python显示的,而是返回”update-alternatives: error: no alternatives for python“,那是因为python的替代版本尚未被update-alternatives 命令识别。解决这个问题只要将python分别放入其中即可
# update-alternatives --install /usr/bin/python python /usr/bin/python2.7 1
update-alternatives: using /usr/bin/python2.7 to provide /usr/bin/python (python) in auto mode
# update-alternatives --install /usr/bin/python python /usr/bin/python3.5 2
update-alternatives: using /usr/bin/python3.5 to provide /usr/bin/python (python) in auto mode注意:--install 选项使用了多个参数用于创建符号链接。最后一个参数指定了此选项的优先级,如果我们没有手动来设置替代选项,那么具有最高优先 级的选项就会被选中。这个例子中,我们为/usr/bin/python3.5 设置的优先级为2,所以update-alternatives 命 令会自动将它设置为默认 Python 版本。
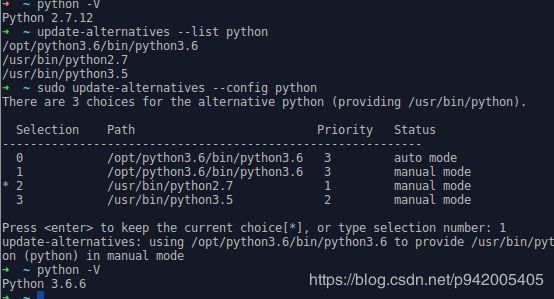
如图可见,可以通过sudo update-alternatives --config python 随意切换python 版本了
参考链接:
https://blog.csdn.net/Neko_smile/article/details/83714732
https://blog.csdn.net/beijiu5854/article/details/77897767