OpenCV中判断点在矩形中的方法
目录
1.问题
2.思路
3.实现
4.资料
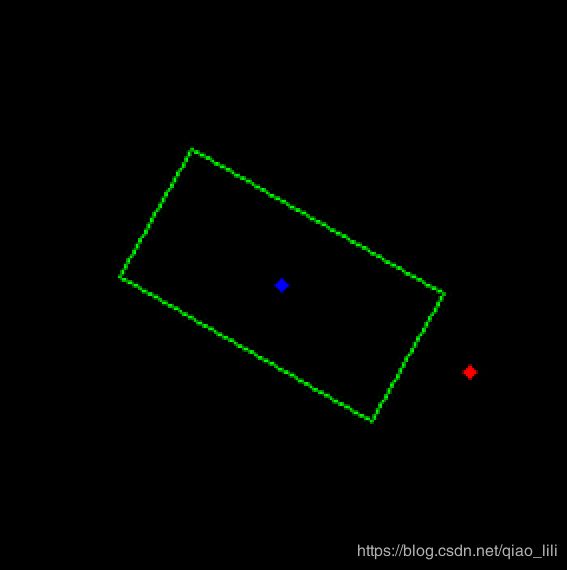
1.问题
如图1.1所示,有红色和蓝色两个点,如何判断点相对于矩形的位置呢?
2.思路
首先,我们知道OpenCV中有一个函数:pointPolygonTest()。它的作用是判断一个点是否在轮廓中,基本用法如下:
C++: double pointPolygonTest(InputArray contour, Point2f pt, bool measureDist);
当measureDist设置为true时,若返回值为正,表示点在轮廓内部,返回值为负,表示在轮廓外部,返回值为0,表示在轮廓上。
当measureDist设置为false时,若返回值为+1,表示点在轮廓内部,返回值为-1,表示在轮廓外部,返回值为0,表示在轮廓上。
这也就是说,如果我们能够把RotateRect类的对象表示成轮廓,就可以直接调用pointPolygonTest()来进行分析了点的相对位置了。
在这里,我对RotatedRect的成员进行简单的梳理:
RotatedRect ():
构造函数:
1.利用浮点参数进行构造:形心、长宽、旋转角度(x轴逆时针旋转的方向)
RotatedRect (const Point2f ¢er, const Size2f &size, float angle)
2.利用矩形的任意三个角点进行构造(浮点数据)
RotatedRect (const Point2f &point1, const Point2f &point2, const Point2f &point3)
成员函数:
1.返回最小外接矩形
Rect cv::RotatedRect::boundingRect() const
Rect_
2.存储矩形的四个角点
void cv::RotatedRect::points(Point2f pts[]) const
3.返回角度、中心点、尺寸
float angle
Point2f center
Size2f size
最后的问题是:给定点的数组,如何将点的数组转化为向量vector?
方法:
//给定点的数组
Point2f corners[4];
//转化为矢量
Point2f* lastItemPointer = (corners + sizeof corners / sizeof corners[0]);
vector contour(corners, lastItemPointer); 3.代码实现
编写判断函数如下:
bool DoesRectangleContainPoint(RotatedRect rectangle, Point2f point)
{
//转化为轮廓
Point2f corners[4];
rectangle.points(corners);
Point2f *lastItemPointer = (corners+sizeof corners/sizeof corners[0]);
vector contour(corners,lastItemPointer);
//判断
double indicator = pointPolygonTest(contour,point,true);
if (indicator >= 0) return true;
else return false;
} 全部的实验代码如下:
#include
#include
using namespace cv;
using namespace std;
bool DoesRectangleContainPoint(RotatedRect rectangle, Point2f point)
{
//转化为轮廓
Point2f corners[4];
rectangle.points(corners);
Point2f *lastItemPointer = (corners+sizeof corners/sizeof corners[0]);
vector contour(corners,lastItemPointer);
//判断
double indicator = pointPolygonTest(contour,point,true);
if (indicator >= 0) return true;
else return false;
}
int main()
{
//准备数据
Mat img(200,200,CV_8UC3,Scalar(0));
RotatedRect rRect = RotatedRect(Point2f(100,100),Size(100,50),30);
Point2f rpoints[4];
rRect.points(rpoints);
for (int i = 0; i < 4; i++)
line(img, rpoints[i], rpoints[(i + 1) % 4], Scalar(0, 255, 0));
circle(img, Point(100,100),2,Scalar(255,0,0),-1);
circle(img, Point(165, 130), 2, Scalar(0, 0, 255), -1);
//判断
bool result1 = DoesRectangleContainPoint(rRect, Point(100, 100));
bool result2 = DoesRectangleContainPoint(rRect, Point(165, 130));
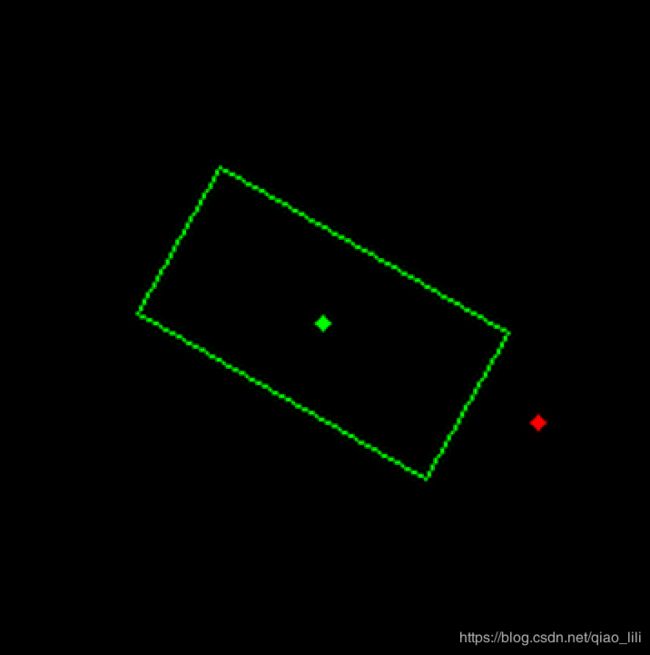
//绘制结果(符合条件的用绿色标注)
if(result1) circle(img, Point(100, 100), 2, Scalar(0, 255, 0), -1);
if (result2) circle(img, Point(165, 130), 2, Scalar(0, 255, 0), -1);
return 0;
} 实验结果:
4.资料
1.RotatedRect类的基本属性:
https://docs.opencv.org/3.4.0/db/dd6/classcv_1_1RotatedRect.html
2.数组转化为向量的简单方法:
https://stackoverflow.com/questions/8777603/what-is-the-simplest-way-to-convert-array-to-vector/8777619#8777619