电阻触摸屏驱动实例分析
s3c2440的CMOS模数转换器(ADC)有8路模拟输入AIN[0-7],8路输入共用一个A/D转换器,电阻触摸屏的输入相当于分压电阻的电压,触摸屏的x,y位置值由分压电阻电压值转换而来。S3c2440向外提供了与触摸屏直接相连的4个模拟输入引脚AIN[4-7],YP,YM,XP,XM。在触摸屏的不同位置按下触摸屏将产生不同的模拟输入电压值,驱动据此来辨别坐标。编写触摸屏的驱动涉及两个中断,一个是INT_ADC,表示数据转换完成,是A/D转换器产生的中断,另一个是INT_TC,表示触摸屏按下或松开产生的中断。
ADC的启动方式有两种:手动启动、读结果时就自动地启动下一次转换。
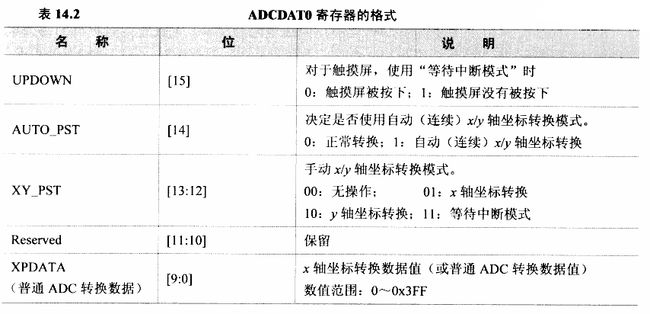
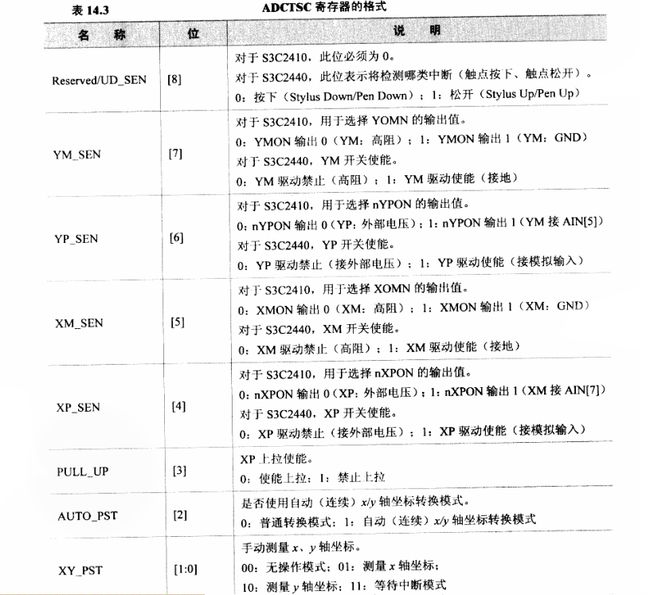
ADC的操作涉及3个寄存器:ADCCON、ADCTSC、ADCDAT0。


触摸屏控制器的四中工作模式:
1、等待中断模式。
可设置ADCTSC寄存器使触摸屏控制器处于这种模式,当触摸屏被按下时,触摸屏控制器将发出INT_TC中断信号,这时触摸屏控制器要转入以下两种工作模式中的一种,以读取x,y坐标。对于ADCTSC bit8,我们可以在驱动里面设置它,设为0表示控制器处于等待按下模式,设为1表示处于等待松开模式。 触摸屏控制器产生中断信号(INT_TC)后,必须清除等待中断模式。(XY_PST设置到无操作模式)
2. 分离的 X/Y 方向转换模式。
触摸屏控制器可以工作在两个转换模式之一。方向转换模式如下方法操作:X方向模式写X方向转换数据到ADCDAT0,然后触摸屏接口产生中断源给中断控制器;Y方向模式写Y方向转换数据到ADCDAT1,然后触摸屏接口产生中断源给中断控制器。
3. 自动(顺序)X/Y方向转换模式。
自动(顺序)X/Y 方向转换模式操作如下:触摸屏控制器顺序变换触摸X方向和Y方向。在自动方向转变模式中触摸控制器在写入X测量数值到ADCDAT0和写入Y测量数值到ADCDAT1后,触摸屏接口产生中断源给中断控制器。
4. 普通转换模式。
单转换模式是最合适的通用 ADC 转换。此模式可以通过设置 ADCCON(ADC控制寄存器)初始化并且通过读写ADCDAT0(ADC数据寄存器0)就能够完成。
ADC的使用步骤:
1、设置ADCCON寄存器,选择输入信号通道,设置A/D转换器的时钟,
2、设置ADCCTS寄存器,使用设置为普通转换模式,不使用触摸屏功能。
3、设置ADCCON寄存器,启动A/D转换。如果设置READ_START位,则读取转换数据(读ADCDAT0寄存器)时自动启动下一次转换,否则可以通过设置ENABLE_START位来启动A/D转换。
4、转换结束时,读取ADCDAT0寄存器获得数值。
另外,ADCDLY寄存器可以设置采样的延时值或发出终端的间隔值。
当触摸屏控制器处于等待中断模式,并且触摸屏被按下或弹起,将触发中断(INTI_TC)。即在等待中断模式中,根据adcdat0[8]的状态可细分为等待按下模式和等待弹起模式。当adcdat[8]=0时是处于等待按下模式,adcdat[8]=1表示处于等待松开模式。当发生按下或弹起中断时,adcdat[15]被自动修改,表示当前发生的是按下中断还是弹起中断,0表示触摸屏被按下了,1表示触摸屏没有别按下。
ADC的使用实例程序就不分析讨论了,下面分析触摸屏的驱动例程。
首先看一下这个驱动的框架:

#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
struct s3c_ts_regs {
unsigned long adccon;
unsigned long adctsc;
unsigned long adcdly;
unsigned long adcdat0;
unsigned long adcdat1;
unsigned long adcupdn;
};
static struct input_dev *s3c_ts_dev;
//把寄存器物理地址ioremap后返回的虚拟地址赋给s3c_ts_regs,就可通过s3c_ts_regs操作寄存器了。
static volatile struct s3c_ts_regs *s3c_ts_regs;
static struct timer_list ts_timer;
static void enter_wait_pen_down_mode(void)
{
s3c_ts_regs->adctsc = 0xd3;//设置ADCTSC寄存器为0xd3让触摸屏控制器进入等待中断模式的等待按下模式
} //d3=1011 0011
//注意:当等待触摸屏中断时,XP_SEN位被设置为1(XP禁止输出)并且PULL_UP为被设置为0(XP上拉使能)。
//只有在自动顺序 X/Y 方向转换时 AUTO_PST 位应该被设置为‘1’。
static void enter_wait_pen_up_mode(void)
{
s3c_ts_regs->adctsc = 0x1d3;//设置ADCTSC寄存器为0xd3让触摸屏控制器进入等待中断模式的等待松开模式
}
static void enter_measure_xy_mode(void)
{
s3c_ts_regs->adctsc = (1<<3)|(1<<2);//自动X、Y测量模式,禁止上拉XP,PULL_UP=1;XP驱动使能,XP_SEN=1
}
static void start_adc(void)
{
s3c_ts_regs->adccon |= (1<<0); //启动AD转换。
}
static int s3c_filter_ts(int x[], int y[])//过滤器函数,一种优化触摸精度的方法。
{
#define ERR_LIMIT 10
int avr_x, avr_y;
int det_x, det_y;
avr_x = (x[0] + x[1])/2;
avr_y = (y[0] + y[1])/2;
det_x = (x[2] > avr_x) ? (x[2] - avr_x) : (avr_x - x[2]); //det_x为差值,det_x = 大值-小值。
det_y = (y[2] > avr_y) ? (y[2] - avr_y) : (avr_y - y[2]);
if ((det_x > ERR_LIMIT) || (det_y > ERR_LIMIT))//差值大于指定的最小误差ERR_LIMIT则舍去这组数据。
return 0; //符合则在返回1.
avr_x = (x[1] + x[2])/2;
avr_y = (y[1] + y[2])/2;
det_x = (x[3] > avr_x) ? (x[3] - avr_x) : (avr_x - x[3]);
det_y = (y[3] > avr_y) ? (y[3] - avr_y) : (avr_y - y[3]);
if ((det_x > ERR_LIMIT) || (det_y > ERR_LIMIT))
return 0;
return 1;
}
static void s3c_ts_timer_function(unsigned long data)//定时器时间到处理函数。
//data 是 ts_timer.data,这里没设置,默认为零,也不使用
{
if (s3c_ts_regs->adcdat0 & (1<<15))
{
/*
/* 已经松开 */这里重复了adc_irq()函数里面的上报,可以去掉。
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
*/
enter_wait_pen_down_mode();
}
else
{
/* 测量X/Y坐标 */
enter_measure_xy_mode();
start_adc();
}
}
static irqreturn_t pen_down_up_irq(int irq, void *dev_id)
{
if (s3c_ts_regs->adcdat0 & (1<<15))
{
/*这里也重复了adc_irq()函数里面的事件上报,可以去掉
//printk("pen up\n");
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
*/
enter_wait_pen_down_mode();
}
else
{
//printk("pen down\n");
//enter_wait_pen_up_mode();
enter_measure_xy_mode();
start_adc();
}
return IRQ_HANDLED;
}
static irqreturn_t adc_irq(int irq, void *dev_id)
{
static int cnt = 0;
static int x[4], y[4];
int adcdat0, adcdat1;
/* 优化措施2: 如果ADC完成时, 发现触摸笔已经松开, 则丢弃此次结果 */
adcdat0 = s3c_ts_regs->adcdat0;
adcdat1 = s3c_ts_regs->adcdat1;
if (s3c_ts_regs->adcdat0 & (1<<15))
{
/*ADC转换完成时,触摸笔已经松开,这样的测量结果不准确,应丢弃,这里不宜上报,应该注释掉
/* 已经松开 */
cnt = 0;
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 0);
input_report_key(s3c_ts_dev, BTN_TOUCH, 0);
input_sync(s3c_ts_dev);
*/
enter_wait_pen_down_mode();
}
else
{
// printk("adc_irq cnt = %d, x = %d, y = %d\n", ++cnt, adcdat0 & 0x3ff, adcdat1 & 0x3ff);
/* 优化措施3: 多次测量求平均值 */
x[cnt] = adcdat0 & 0x3ff;
y[cnt] = adcdat1 & 0x3ff;
++cnt;
if (cnt == 4)
{
/* 优化措施4: 软件过滤 */
if (s3c_filter_ts(x, y))
{
//printk("x = %d, y = %d\n", (x[0]+x[1]+x[2]+x[3])/4, (y[0]+y[1]+y[2]+y[3])/4);
input_report_abs(s3c_ts_dev, ABS_X, (x[0]+x[1]+x[2]+x[3])/4);
input_report_abs(s3c_ts_dev, ABS_Y, (y[0]+y[1]+y[2]+y[3])/4);
input_report_abs(s3c_ts_dev, ABS_PRESSURE, 1);
input_report_key(s3c_ts_dev, BTN_TOUCH, 1);
input_sync(s3c_ts_dev);
}
cnt = 0;
enter_wait_pen_up_mode();
/* 启动定时器处理长按/滑动的情况 */
//长时间没弹起,则继续进入测量模式重复测量。
mod_timer(&ts_timer, jiffies + HZ/100);
}
else
{
enter_measure_xy_mode();
start_adc();
}
}
return IRQ_HANDLED;
}
static int s3c_ts_init(void)
{
struct clk* clk;
/* 1. 分配一个input_dev结构体 */
s3c_ts_dev = input_allocate_device();
/* 2. 设置 */
/* 2.1 能产生哪类事件 */
set_bit(EV_KEY, s3c_ts_dev->evbit);
set_bit(EV_ABS, s3c_ts_dev->evbit);
/* 2.2 能产生这类事件里的哪些事件 */
set_bit(BTN_TOUCH, s3c_ts_dev->keybit);
input_set_abs_params(s3c_ts_dev, ABS_X, 0, 0x3FF, 0, 0);
input_set_abs_params(s3c_ts_dev, ABS_Y, 0, 0x3FF, 0, 0);
input_set_abs_params(s3c_ts_dev, ABS_PRESSURE, 0, 1, 0, 0);
/* 3. 注册 */
input_register_device(s3c_ts_dev);
/* 4. 硬件相关的操作 */
/* 4.1 使能时钟(CLKCON[15]) */
clk = clk_get(NULL, "adc");
clk_enable(clk);
/* 4.2 设置S3C2440的ADC/TS寄存器 */
s3c_ts_regs = ioremap(0x58000000, sizeof(struct s3c_ts_regs));
/* bit[14] : 1-A/D converter prescaler enable
* bit[13:6]: A/D converter prescaler value,
* 49, ADCCLK=PCLK/(49+1)=50MHz/(49+1)=1MHz
* bit[0]: A/D conversion starts by enable. 先设为0
*/
s3c_ts_regs->adccon = (1<<14)|(49<<6);
request_irq(IRQ_TC, pen_down_up_irq, IRQF_SAMPLE_RANDOM, "ts_pen", NULL);
request_irq(IRQ_ADC, adc_irq, IRQF_SAMPLE_RANDOM, "adc", NULL);
/* 优化措施1:
* 设置ADCDLY为最大值, 这使得电压稳定后再发出IRQ_TC中断
*/
s3c_ts_regs->adcdly = 0xffff;
/* 优化措施5: 使用定时器处理长按,滑动的情况
*
*/
init_timer(&ts_timer);
ts_timer.function = s3c_ts_timer_function;
add_timer(&ts_timer); //此时默认超时时间是0,马上超时,调用一次定时器超时处理函数。
//s2c_ts_timer_function中应该忽略这一个超时。这里没处理这个,可能会有bug,
//先暂不理会它。
enter_wait_pen_down_mode();
return 0;
}
static void s3c_ts_exit(void)
{
free_irq(IRQ_TC, NULL);
free_irq(IRQ_ADC, NULL);
iounmap(s3c_ts_regs);
input_unregister_device(s3c_ts_dev);
input_free_device(s3c_ts_dev);
del_timer(&ts_timer);
}
module_init(s3c_ts_init);
module_exit(s3c_ts_exit);
MODULE_LICENSE("GPL");