OpenCV3 亚像素角点检测:cornerSubPix()
前言:cv::goodFeaturesToTrack()提取到的角点只能达到像素级别【OpenCV3 角点检测:goodFeaturesToTrack()】,在很多情况下并不能满足实际的需求,这时,我们则需要使用cv::cornerSubPix()对检测到的角点作进一步的优化计算,可使角点的精度达到亚像素级别。
函数原型:
void cv::cornerSubPix(
cv::InputArray image, // 输入图像
cv::InputOutputArray corners, // 角点(既作为输入也作为输出)
cv::Size winSize, // 区域大小为 NXN; N=(winSize*2+1)
cv::Size zeroZone, // 类似于winSize,但是总具有较小的范围,Size(-1,-1)表示忽略
cv::TermCriteria criteria // 停止优化的标准
);
参数解析:
第一个参数是输入图像,和cv::goodFeaturesToTrack()中的输入图像是同一个图像。
第二个参数是检测到的角点,即是输入也是输出。
第三个参数是计算亚像素角点时考虑的区域的大小,大小为NXN; N=(winSize*2+1)。
第四个参数作用类似于winSize,但是总是具有较小的范围,通常忽略(即Size(-1, -1))。
第五个参数用于表示计算亚像素时停止迭代的标准,可选的值有cv::TermCriteria::MAX_ITER 、cv::TermCriteria::EPS(可以是两者其一,或两者均选),
前者表示迭代次数达到了最大次数时停止,后者表示角点位置变化的最小值已经达到最小时停止迭代。二者均使用cv::TermCriteria()构造函数进行指定。
程序示例:
#include
#include
#include
#include
#include
int main()
{
cv::Mat image_color = cv::imread("house.jpg", 1);
//用于绘制亚像素角点
cv::Mat image_copy = image_color.clone();
//使用灰度图像进行角点检测
cv::Mat image_gray;
cv::cvtColor(image_color, image_gray, cv::COLOR_BGR2GRAY);
//设置角点检测参数
std::vector corners;
int max_corners = 100;
double quality_level = 0.01;
double min_distance = 10;
int block_size = 3;
bool use_harris = false;
double k = 0.04;
//角点检测
cv::goodFeaturesToTrack(image_gray,
corners,
max_corners,
quality_level,
min_distance,
cv::Mat(),
block_size,
use_harris,
k);
//将检测到的角点绘制到原图上
for (int i = 0; i < corners.size(); i++)
{
cv::circle(image_color, corners[i], 5, cv::Scalar(0, 0, 255), 2, 8, 0);
}
//指定亚像素计算迭代标注
cv::TermCriteria criteria = cv::TermCriteria(
cv::TermCriteria::MAX_ITER + cv::TermCriteria::EPS,
40,
0.01);
//亚像素检测
cv::cornerSubPix(image_gray, corners, cv::Size(5, 5), cv::Size(-1, -1), criteria);
//将检测到的亚像素角点绘制到原图上
for (int i = 0; i < corners.size(); i++)
{
cv::circle(image_copy, corners[i], 5, cv::Scalar(0, 255, 0), 2, 8, 0);
}
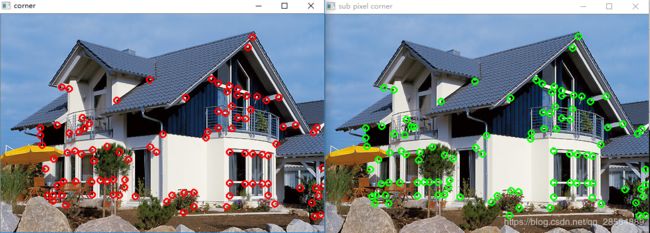
cv::imshow("corner", image_color);
cv::imshow("sub pixel corner", image_copy);
cv::imwrite("corner.jpg", image_color);
cv::imwrite("corner_sub.jpg", image_copy);
cv::waitKey(0);
return 0;
}