- PyTorch 深度学习实战(19):离线强化学习与 Conservative Q-Learning (CQL) 算法
进取星辰
PyTorch深度学习实战深度学习pytorch算法
在上一篇文章中,我们探讨了分布式强化学习与IMPALA算法,展示了如何通过并行化训练提升强化学习的效率。本文将聚焦离线强化学习(OfflineRL)这一新兴方向,并实现ConservativeQ-Learning(CQL)算法,利用Minari提供的静态数据集训练安全的强化学习策略。一、离线强化学习与CQL原理1.离线强化学习的特点无需环境交互:直接从预收集的静态数据集学习数据效率高:复用历史经验
- 一切皆是映射:DQN训练加速技术:分布式训练与GPU并行
AI天才研究院
计算AI大模型企业级应用开发实战ChatGPT计算科学神经计算深度学习神经网络大数据人工智能大型语言模型AIAGILLMJavaPython架构设计AgentRPA
1.背景介绍1.1深度强化学习的兴起近年来,深度强化学习(DeepReinforcementLearning,DRL)在游戏、机器人控制、自然语言处理等领域取得了令人瞩目的成就。作为一种结合深度学习和强化学习的强大技术,DRL能够使智能体在与环境交互的过程中学习最优策略,从而实现自主决策和控制。1.2DQN算法及其局限性深度Q网络(DeepQ-Network,DQN)是DRL的一种经典算法,它利用
- 实战LLM强化学习——使用GRPO(DeepSeek R1出圈算法)
大富大贵7
程序员知识储备1程序员知识储备2程序员知识储备3经验分享
引言近年来,深度强化学习(DRL)已经成为解决复杂决策问题的一个强有力工具,尤其是在自然语言处理(NLP)领域的广泛应用。通过不断优化决策策略,DRL能在大量数据中学习最佳行为,尤其是大型语言模型(LLM)在任务中展现出的巨大潜力。然而,随着模型规模的扩大和任务复杂性的增加,传统的强化学习算法开始暴露出训练效率低、收敛速度慢等问题。为了解决这些挑战,DeepSeek公司提出了一个新的强化学习算法—
- Ai时代初期全球不同纬度的层级辐射现象
龙胥伯
人工智能
基于最新研究成果与行业动态,AI时代的"层级辐射"现象可被科学解构为以下六大维度,结合技术演进、产业实践和社会影响进行系统性分析:一、技术能力的层级跃迁模型效率革命DeepSeek研发的R1-Zero模型通过动态架构设计,将样本利用率提升40%以上,训练周期大幅缩短。这种技术突破推动AI从实验室走向规模化应用,在智能制造、生物医药等领域催生新生态。大语言模型的训练方式(预训练→多任务学习→强化学习
- PyTorch 深度学习实战(12):Actor-Critic 算法与策略优化
进取星辰
PyTorch深度学习实战深度学习pytorch算法
在上一篇文章中,我们介绍了强化学习的基本概念,并使用深度Q网络(DQN)解决了CartPole问题。本文将深入探讨Actor-Critic算法,这是一种结合了策略梯度(PolicyGradient)和值函数(ValueFunction)的强化学习方法。我们将使用PyTorch实现Actor-Critic算法,并应用于经典的CartPole问题。一、Actor-Critic算法基础Actor-Cri
- PyTorch 深度学习实战(17):Asynchronous Advantage Actor-Critic (A3C) 算法与并行训练
进取星辰
PyTorch深度学习实战深度学习pytorch算法
在上一篇文章中,我们深入探讨了SoftActor-Critic(SAC)算法及其在平衡探索与利用方面的优势。本文将介绍强化学习领域的重要里程碑——AsynchronousAdvantageActor-Critic(A3C)算法,并展示如何利用PyTorch实现并行化训练来加速学习过程。一、A3C算法原理A3C算法由DeepMind于2016年提出,通过异步并行的多个智能体(Worker)与环境交互
- DeepSeek在智慧物流管控中的全场景落地方案
猴的哥儿
笔记大数据交通物流python数据仓库微服务
一、智慧物流核心痛点与DeepSeek解决方案矩阵物流环节行业痛点DeepSeek技术方案价值增益仓储管理库存预测误差率>30%多模态时空预测模型库存周转率↑40%运输调度车辆空驶率35%强化学习动态调度引擎运输成本↓25%路径规划突发路况响应延迟>30分钟实时路况语义理解+自适应规划准时交付率↑18%异常检测50%异常依赖人工发现多传感器融合的异常模式识别异常发现时效↑6倍客户服务50%咨询需人
- 探索DeepSeek:前端开发者不可错过的新一代AI技术实践指南
formerlyai
人工智能前端
引言:为什么DeepSeek成为技术圈焦点?最近,国产AI模型DeepSeek凭借其低成本训练、高性能输出和开源策略,迅速成为开发者社区的热门话题。作为覆盖语言、代码、视觉的多模态技术矩阵,DeepSeek不仅实现了与ChatGPT相媲美的能力,还通过强化学习驱动的架构创新,解决了大模型落地中的成本与效率瓶颈。对于前端开发者而言,DeepSeek的API接入能力和私有化部署方案,为智能应用开发提供
- 【sklearn 02】监督学习、非监督下学习、强化学习
@金色海岸
sklearn学习人工智能
监督学习、非监督学习、强化学习**机器学习通常分为无监督学习、监督学习和强化学习三类。-第一类:无监督学习(unsupervisedlearning),指的是从信息出发自动寻找规律,分析数据的结构,常见的无监督学习任务有聚类、降维、密度估计、关联分析等。-第二类:监督学习(supervisedlearning),监督学习指的是使用带标签的数据去训练模型,并预测未知数据的标签。监督学习有两种,当预测
- 【人工智能基础2】机器学习、深度学习总结
roman_日积跬步-终至千里
人工智能习题人工智能机器学习深度学习
文章目录一、人工智能关键技术二、机器学习基础1.监督、无监督、半监督学习2.损失函数:四种损失函数3.泛化与交叉验证4.过拟合与欠拟合5.正则化6.支持向量机三、深度学习基础1、概念与原理2、学习方式3、多层神经网络训练方法一、人工智能关键技术领域基础原理与逻辑机器学习机器学习基于数据,研究从观测数据出发寻找规律,利用这些规律对未来数据进行预测。基于学习模式,机器学习可以分为监督、无监督、强化学习
- 从过拟合到强化学习:机器学习核心知识全解析
吴师兄大模型
0基础实现机器学习入门到精通机器学习人工智能过拟合强化学习pythonLLMscikit-learn
Langchain系列文章目录01-玩转LangChain:从模型调用到Prompt模板与输出解析的完整指南02-玩转LangChainMemory模块:四种记忆类型详解及应用场景全覆盖03-全面掌握LangChain:从核心链条构建到动态任务分配的实战指南04-玩转LangChain:从文档加载到高效问答系统构建的全程实战05-玩转LangChain:深度评估问答系统的三种高效方法(示例生成、手
- 基于DeepSeek R1构建下一代Manus通用型AI智能体的技术实践
zhangjiaofa
DeepSeekR1&AI人工智能大模型DeepSeekManus智能体AI
目录一、技术背景与目标定位1.1大模型推理能力演进趋势1.2DeepSeekR1核心特性解析-混合专家架构(MoE)优化-组相对策略优化(GRPO)原理-多阶段强化学习训练范式1.3Manus智能体框架设计理念-多智能体协作机制-安全执行沙箱设计二、系统架构设计2.1整体架构拓扑图-分层模块交互机制-数据流与控制流设计2.2核心组件实现-规划模块(GRPO算法集成)-记忆系统分级存储架构-工具调用
- 强化学习:时间差分(TD)(SARSA算法和Q-Learning算法)(看不懂算我输专栏)——手把手教你入门强化学习(六)
wxchyy
强化学习算法
目录前言前期回顾一、SARSA算法二、Q-Learning算法三、总结总结前言 前两期我们介绍了动态规划算法,还有蒙特卡洛算法,不过它们对于状态价值函数的估值都有其缺陷性,像动态规划,需要从最下面向上进行递推,而蒙特克洛则需要一个Episode(回合)结束才能对其进行估值,有没有更直接的方法,智能体能边做动作,边估值一次,不断学习策略?答案是有的。这就是本期需要介绍的算法,时间差分法(TimeDi
- 大型语言模型与强化学习的融合:迈向通用人工智能的新范式——基于基础复现的实验平台构建
(initial)
大模型科普人工智能强化学习
1.引言大型语言模型(LLM)在自然语言处理领域的突破,展现了强大的知识存储、推理和生成能力,为人工智能带来了新的可能性。强化学习(RL)作为一种通过与环境交互学习最优策略的方法,在智能体训练中发挥着重要作用。本文旨在探索LLM与RL的深度融合,分析LLM如何赋能RL,并阐述这种融合对于迈向通用人工智能(AGI)的意义。为了更好地理解这一融合的潜力,我们基于“LargeLanguageModela
- 强化学习-Chapter2-贝尔曼方程
Rsbs
算法机器学习概率论
强化学习-Chapter2-贝尔曼方程贝尔曼方程推导继续展开贝尔曼方程的矩阵形式状态值的求解动作价值函数与状态价值函数的关系贝尔曼方程推导Vπ(s)=E[Gt∣St=s]=E[rt+1+(γrt+2+…)∣St=s]=E[rt+1+γGt+1∣St=s]=∑a∈Aπ(s,a)∑s′∈SPs→s′a⋅(Rs→s′a+γE[Gt+1∣St+1=s′])=∑a∈Aπ(s,a)∑s′∈SPs→s′a⋅(R
- 【开源代码解读】AI检索系统R1-Searcher通过强化学习RL激励大模型LLM的搜索能力
accurater
人工智能深度学习R1-Searcher
关于R1-Searcher的报告:第一章:引言-AI检索系统的技术演进与R1-Searcher的创新定位1.1信息检索技术的范式转移在数字化时代爆发式增长的数据洪流中,信息检索系统正经历从传统关键词匹配到语义理解驱动的根本性变革。根据IDC的统计,2023年全球数据总量已突破120ZB,其中非结构化数据占比超过80%。这种数据形态的转变对检索系统提出了三个核心的挑战:语义歧义消除:如何准确理解"A
- PyTorch 深度学习实战(13):Proximal Policy Optimization (PPO) 算法
进取星辰
PyTorch深度学习实战深度学习pytorch算法
在上一篇文章中,我们介绍了Actor-Critic算法,并使用它解决了CartPole问题。本文将深入探讨ProximalPolicyOptimization(PPO)算法,这是一种更稳定、更高效的策略优化方法。我们将使用PyTorch实现PPO算法,并应用于经典的CartPole问题。一、PPO算法基础PPO是OpenAI提出的一种强化学习算法,旨在解决策略梯度方法中的训练不稳定问题。PPO通过
- 院士领衔、IEEE Fellow 坐镇,清华、上交大、复旦、同济等专家齐聚 2025 全球机器学习技术大会
CSDN资讯
机器学习人工智能
随着Manus出圈,OpenManus、OWL迅速开源,OpenAI推出智能体开发工具,全球AI生态正经历新一轮智能体革命。大模型如何协同学习?大模型如何自我进化?新型强化学习技术如何赋能智能体?围绕这些关键问题,由CSDN&Boolan联合举办的「2025全球机器学习技术大会」将于4月18-19日在上海隆重举行。大会云集院士、10所高校科研工作者、近30家一线科技企业技术实战专家组成的超50位重
- 推理大模型:技术解析与未来趋势全景
时光旅人01号
深度学习人工智能pythonpytorch神经网络
1.推理大模型的定义推理大模型(ReasoningLLMs)是专门针对复杂多步推理任务优化的大型语言模型,具备以下核心特性:输出形式创新展示完整逻辑链条(如公式推导、多阶段分析)任务类型聚焦擅长数学证明、编程挑战、多模态谜题等深度逻辑任务训练方法升级融合强化学习、思维链(CoT)、测试时计算扩展等技术2.主流推理大模型图谱2.1国际前沿模型OpenAIo1系列内部生成"思维链"机制数学/代码能力标
- 一文读懂强化学习:从基础到应用
LHTZ
算法时序数据库大数据数据库架构动态规划
强化学习是什么强化学习是人工智能领域的一种学习方法,简单来说,就是让一个智能体(比如机器人、电脑程序)在一个环境里不断尝试各种行为。每次行为后,环境会给智能体一个奖励或者惩罚信号,智能体根据这个信号来调整自己的行为,目的是让自己在未来能获得更多奖励。就像训练小狗,小狗做对了动作(比如坐下),就给它零食(奖励),做错了就没有零食(惩罚),慢慢地小狗就知道怎么做能得到更多零食,也就是学会了最优行为。强
- QwQ-32B企业级本地部署:结合XInference与Open-WebUI使用
大势下的牛马
搭建本地gptRAG知识库人工智能QwQ-32B
QwQ-32B是阿里巴巴Qwen团队推出的一款推理模型,拥有320亿参数,基于Transformer架构,采用大规模强化学习方法训练而成。它在数学推理、编程等复杂问题解决任务上表现出色,性能可媲美拥有6710亿参数的DeepSeek-R1。QwQ-32B在多个基准测试中表现出色,例如在AIME24基准上,其数学问题解决能力得分达到79.5,超过OpenAI的o1-mini。它在LiveBench、
- LLM Weekly(2025.03.03-03.09)
UnknownBody
LLMDailyLLMWeekly语言模型人工智能
网络新闻QwQ-32B:拥抱强化学习的力量。研究人员推出了QwQ-32B,这是一个拥有320亿参数的模型,它利用强化学习来提升推理能力。尽管参数较少,但通过整合类似智能体的推理和反馈机制,QwQ-32B的表现可与更大规模的模型相媲美。该模型可在HuggingFace平台上获取。**人工智能领域的先驱安德鲁·巴托(AndrewBarto)和理查德·萨顿(RichardSutton)因对强化学习的开创
- Chebykan wx 文章阅读
やっはろ
深度学习
文献筛选[1]神经网络:全面基础[2]通过sigmoid函数的超层叠近似[3]多层前馈网络是通用近似器[5]注意力是你所需要的[6]深度残差学习用于图像识别[7]视觉化神经网络的损失景观[8]牙齿模具点云补全通过数据增强和混合RL-GAN[9]强化学习:一项调查[10]使用PySR和SymbolicRegression.jl的科学可解释机器学习[11]Z.Liu,Y.Wang,S.Vaidya,F
- 用物理信息神经网络(PINN)解决实际优化问题:全面解析与实践
青橘MATLAB学习
深度学习网络设计人工智能深度学习物理信息神经网络强化学习
摘要本文系统介绍了物理信息神经网络(PINN)在解决实际优化问题中的创新应用。通过将物理定律与神经网络深度融合,PINN在摆的倒立控制、最短时间路径规划及航天器借力飞行轨道设计等复杂任务中展现出显著优势。实验表明,PINN相比传统数值方法及强化学习(RL)/遗传算法(GA),在收敛速度、解的稳定性及物理保真度上均实现突破性提升。关键词:物理信息神经网络;优化任务;深度学习;强化学习;航天器轨道一、
- django allauth 自定义登录界面
waterHBO
djangopythondjango数据库sqlitepython笔记经验分享
起因,目的:为什么前几天还在写强化学习,今天又写django,问就是:客户需求>个人兴趣。问题来源:allauth默认的登录界面不好看,这里记录几个问题。1.注册页面SignUp这里增加,手机号,邮编等等。2.使用谷歌来登录这个步骤其实也简单。xxxxxxxx一定要修改关键的信息,不能随便暴露给别人。xxxxxxxx#HowtouseGoogleLogin.1.createsuperuser.(m
- 人工智能机器学习算法分类全解析
power-辰南
人工智能人工智能机器学习算法python
目录一、引言二、机器学习算法分类概述(一)基于学习方式的分类1.监督学习(SupervisedLearning)2.无监督学习(UnsupervisedLearning)3.强化学习(ReinforcementLearning)(二)基于任务类型的分类1.分类算法2.回归算法3.聚类算法4.降维算法5.生成算法(三)基于模型结构的分类1.线性模型2.非线性模型3.基于树的模型4.基于神经网络的模型
- 怎么定义世界模型,Sora/Genie/JEPA 谁是世界模型呢?(1)
周博洋K
分布式人工智能深度学习自然语言处理机器学习
说这个问题之前先看一下什么是世界模型,它的定义是什么?首先世界模型的起源是咋回事呢?其实世界模型在ML领域不是什么新概念,远远早于Transfomer这些东西被提出来,因为它最早是强化学习RL领域的,在20世纪90年代由JuergenSchmiduber实验室给提出来的。2018年被Ha和Schmiduber发表了用RNN来做世界模型的论文,相当于给他重新做了一次定义。然后就是最近跟着Sora,G
- 《Natural Actor-Critic》译读笔记
songyuc
笔记
《NaturalActor-Critic》摘要本文提出了一种新型的强化学习架构,即自然演员-评论家(NaturalActor-Critic)。Theactor的更新通过使用Amari的自然梯度方法进行策略梯度的随机估计来实现,而评论家则通过线性回归同时获得自然策略梯度和价值函数的附加参数。本文展示了使用自然策略梯度的actor改进特别有吸引力,因为这些梯度与所选策略表示的坐标框架无关,并且比常规策
- LLM Weekly(2025.02.17-02.23)
UnknownBody
LLMDailyLLMWeekly人工智能自然语言处理
本文是LLM系列文章,主要是针对2025.02.17-02.23这一周的LLM相关新闻与文章、GitHub资源分享。网络新闻Grok3Beta——推理代理的时代。Grok发布了Grok3Beta,通过强化学习、扩展计算和多模态理解提供卓越的推理能力。Grok3和Grok3mini在学术基准上取得了高分,其中Grok3在AIME’25上获得了93.3%的分数。Grok3的推理可通过“思考”按钮访问,
- 大话机器学习三大门派:监督、无监督与强化学习
安意诚Matrix
机器学习笔记机器学习人工智能
以武侠江湖为隐喻,系统阐述了机器学习的三大范式:监督学习(少林派)凭借标注数据精准建模,擅长图像分类等预测任务;无监督学习(逍遥派)通过数据自组织发现隐藏规律,在生成对抗网络(GAN)等场景大放异彩;强化学习(明教)依托动态环境交互优化策略,驱动AlphaGo、自动驾驶等突破性应用。文章融合技术深度与江湖趣味,既解析了CNN、PCA、Q-learning等核心算法的"武功心法"(数学公式与代码实现
- LeetCode[位运算] - #137 Single Number II
Cwind
javaAlgorithmLeetCode题解位运算
原题链接:#137 Single Number II
要求:
给定一个整型数组,其中除了一个元素之外,每个元素都出现三次。找出这个元素
注意:算法的时间复杂度应为O(n),最好不使用额外的内存空间
难度:中等
分析:
与#136类似,都是考察位运算。不过出现两次的可以使用异或运算的特性 n XOR n = 0, n XOR 0 = n,即某一
- 《JavaScript语言精粹》笔记
aijuans
JavaScript
0、JavaScript的简单数据类型包括数字、字符创、布尔值(true/false)、null和undefined值,其它值都是对象。
1、JavaScript只有一个数字类型,它在内部被表示为64位的浮点数。没有分离出整数,所以1和1.0的值相同。
2、NaN是一个数值,表示一个不能产生正常结果的运算结果。NaN不等于任何值,包括它本身。可以用函数isNaN(number)检测NaN,但是
- 你应该更新的Java知识之常用程序库
Kai_Ge
java
在很多人眼中,Java 已经是一门垂垂老矣的语言,但并不妨碍 Java 世界依然在前进。如果你曾离开 Java,云游于其它世界,或是每日只在遗留代码中挣扎,或许是时候抬起头,看看老 Java 中的新东西。
Guava
Guava[gwɑ:və],一句话,只要你做Java项目,就应该用Guava(Github)。
guava 是 Google 出品的一套 Java 核心库,在我看来,它甚至应该
- HttpClient
120153216
httpclient
/**
* 可以传对象的请求转发,对象已流形式放入HTTP中
*/
public static Object doPost(Map<String,Object> parmMap,String url)
{
Object object = null;
HttpClient hc = new HttpClient();
String fullURL
- Django model字段类型清单
2002wmj
django
Django 通过 models 实现数据库的创建、修改、删除等操作,本文为模型中一般常用的类型的清单,便于查询和使用: AutoField:一个自动递增的整型字段,添加记录时它会自动增长。你通常不需要直接使用这个字段;如果你不指定主键的话,系统会自动添加一个主键字段到你的model。(参阅自动主键字段) BooleanField:布尔字段,管理工具里会自动将其描述为checkbox。 Cha
- 在SQLSERVER中查找消耗CPU最多的SQL
357029540
SQL Server
返回消耗CPU数目最多的10条语句
SELECT TOP 10
total_worker_time/execution_count AS avg_cpu_cost, plan_handle,
execution_count,
(SELECT SUBSTRING(text, statement_start_of
- Myeclipse项目无法部署,Undefined exploded archive location
7454103
eclipseMyEclipse
做个备忘!
错误信息为:
Undefined exploded archive location
原因:
在工程转移过程中,导致工程的配置文件出错;
解决方法:
- GMT时间格式转换
adminjun
GMT时间转换
普通的时间转换问题我这里就不再罗嗦了,我想大家应该都会那种低级的转换问题吧,现在我向大家总结一下如何转换GMT时间格式,这种格式的转换方法网上还不是很多,所以有必要总结一下,也算给有需要的朋友一个小小的帮助啦。
1、可以使用
SimpleDateFormat SimpleDateFormat
EEE-三位星期
d-天
MMM-月
yyyy-四位年
- Oracle数据库新装连接串问题
aijuans
oracle数据库
割接新装了数据库,客户端登陆无问题,apache/cgi-bin程序有问题,sqlnet.log日志如下:
Fatal NI connect error 12170.
VERSION INFORMATION: TNS for Linux: Version 10.2.0.4.0 - Product
- 回顾java数组复制
ayaoxinchao
java数组
在写这篇文章之前,也看了一些别人写的,基本上都是大同小异。文章是对java数组复制基础知识的回顾,算是作为学习笔记,供以后自己翻阅。首先,简单想一下这个问题:为什么要复制数组?我的个人理解:在我们在利用一个数组时,在每一次使用,我们都希望它的值是初始值。这时我们就要对数组进行复制,以达到原始数组值的安全性。java数组复制大致分为3种方式:①for循环方式 ②clone方式 ③arrayCopy方
- java web会话监听并使用spring注入
bewithme
Java Web
在java web应用中,当你想在建立会话或移除会话时,让系统做某些事情,比如说,统计在线用户,每当有用户登录时,或退出时,那么可以用下面这个监听器来监听。
import java.util.ArrayList;
import java.ut
- NoSQL数据库之Redis数据库管理(Redis的常用命令及高级应用)
bijian1013
redis数据库NoSQL
一 .Redis常用命令
Redis提供了丰富的命令对数据库和各种数据库类型进行操作,这些命令可以在Linux终端使用。
a.键值相关命令
b.服务器相关命令
1.键值相关命令
&
- java枚举序列化问题
bingyingao
java枚举序列化
对象在网络中传输离不开序列化和反序列化。而如果序列化的对象中有枚举值就要特别注意一些发布兼容问题:
1.加一个枚举值
新机器代码读分布式缓存中老对象,没有问题,不会抛异常。
老机器代码读分布式缓存中新对像,反序列化会中断,所以在所有机器发布完成之前要避免出现新对象,或者提前让老机器拥有新增枚举的jar。
2.删一个枚举值
新机器代码读分布式缓存中老对象,反序列
- 【Spark七十八】Spark Kyro序列化
bit1129
spark
当使用SparkContext的saveAsObjectFile方法将对象序列化到文件,以及通过objectFile方法将对象从文件反序列出来的时候,Spark默认使用Java的序列化以及反序列化机制,通常情况下,这种序列化机制是很低效的,Spark支持使用Kyro作为对象的序列化和反序列化机制,序列化的速度比java更快,但是使用Kyro时要注意,Kyro目前还是有些bug。
Spark
- Hybridizing OO and Functional Design
bookjovi
erlanghaskell
推荐博文:
Tell Above, and Ask Below - Hybridizing OO and Functional Design
文章中把OO和FP讲的深入透彻,里面把smalltalk和haskell作为典型的两种编程范式代表语言,此点本人极为同意,smalltalk可以说是最能体现OO设计的面向对象语言,smalltalk的作者Alan kay也是OO的最早先驱,
- Java-Collections Framework学习与总结-HashMap
BrokenDreams
Collections
开发中常常会用到这样一种数据结构,根据一个关键字,找到所需的信息。这个过程有点像查字典,拿到一个key,去字典表中查找对应的value。Java1.0版本提供了这样的类java.util.Dictionary(抽象类),基本上支持字典表的操作。后来引入了Map接口,更好的描述的这种数据结构。
&nb
- 读《研磨设计模式》-代码笔记-职责链模式-Chain Of Responsibility
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
/**
* 业务逻辑:项目经理只能处理500以下的费用申请,部门经理是1000,总经理不设限。简单起见,只同意“Tom”的申请
* bylijinnan
*/
abstract class Handler {
/*
- Android中启动外部程序
cherishLC
android
1、启动外部程序
引用自:
http://blog.csdn.net/linxcool/article/details/7692374
//方法一
Intent intent=new Intent();
//包名 包名+类名(全路径)
intent.setClassName("com.linxcool", "com.linxcool.PlaneActi
- summary_keep_rate
coollyj
SUM
BEGIN
/*DECLARE minDate varchar(20) ;
DECLARE maxDate varchar(20) ;*/
DECLARE stkDate varchar(20) ;
DECLARE done int default -1;
/* 游标中 注册服务器地址 */
DE
- hadoop hdfs 添加数据目录出错
daizj
hadoophdfs扩容
由于原来配置的hadoop data目录快要用满了,故准备修改配置文件增加数据目录,以便扩容,但由于疏忽,把core-site.xml, hdfs-site.xml配置文件dfs.datanode.data.dir 配置项增加了配置目录,但未创建实际目录,重启datanode服务时,报如下错误:
2014-11-18 08:51:39,128 WARN org.apache.hadoop.h
- grep 目录级联查找
dongwei_6688
grep
在Mac或者Linux下使用grep进行文件内容查找时,如果给定的目标搜索路径是当前目录,那么它默认只搜索当前目录下的文件,而不会搜索其下面子目录中的文件内容,如果想级联搜索下级目录,需要使用一个“-r”参数:
grep -n -r "GET" .
上面的命令将会找出当前目录“.”及当前目录中所有下级目录
- yii 修改模块使用的布局文件
dcj3sjt126com
yiilayouts
方法一:yii模块默认使用系统当前的主题布局文件,如果在主配置文件中配置了主题比如: 'theme'=>'mythm', 那么yii的模块就使用 protected/themes/mythm/views/layouts 下的布局文件; 如果未配置主题,那么 yii的模块就使用 protected/views/layouts 下的布局文件, 总之默认不是使用自身目录 pr
- 设计模式之单例模式
come_for_dream
设计模式单例模式懒汉式饿汉式双重检验锁失败无序写入
今天该来的面试还没来,这个店估计不会来电话了,安静下来写写博客也不错,没事翻了翻小易哥的博客甚至与大牛们之间的差距,基础知识不扎实建起来的楼再高也只能是危楼罢了,陈下心回归基础把以前学过的东西总结一下。
*********************************
- 8、数组
豆豆咖啡
二维数组数组一维数组
一、概念
数组是同一种类型数据的集合。其实数组就是一个容器。
二、好处
可以自动给数组中的元素从0开始编号,方便操作这些元素
三、格式
//一维数组
1,元素类型[] 变量名 = new 元素类型[元素的个数]
int[] arr =
- Decode Ways
hcx2013
decode
A message containing letters from A-Z is being encoded to numbers using the following mapping:
'A' -> 1
'B' -> 2
...
'Z' -> 26
Given an encoded message containing digits, det
- Spring4.1新特性——异步调度和事件机制的异常处理
jinnianshilongnian
spring 4.1
目录
Spring4.1新特性——综述
Spring4.1新特性——Spring核心部分及其他
Spring4.1新特性——Spring缓存框架增强
Spring4.1新特性——异步调用和事件机制的异常处理
Spring4.1新特性——数据库集成测试脚本初始化
Spring4.1新特性——Spring MVC增强
Spring4.1新特性——页面自动化测试框架Spring MVC T
- squid3(高命中率)缓存服务器配置
liyonghui160com
系统:centos 5.x
需要的软件:squid-3.0.STABLE25.tar.gz
1.下载squid
wget http://www.squid-cache.org/Versions/v3/3.0/squid-3.0.STABLE25.tar.gz
tar zxf squid-3.0.STABLE25.tar.gz &&
- 避免Java应用中NullPointerException的技巧和最佳实践
pda158
java
1) 从已知的String对象中调用equals()和equalsIgnoreCase()方法,而非未知对象。 总是从已知的非空String对象中调用equals()方法。因为equals()方法是对称的,调用a.equals(b)和调用b.equals(a)是完全相同的,这也是为什么程序员对于对象a和b这么不上心。如果调用者是空指针,这种调用可能导致一个空指针异常
Object unk
- 如何在Swift语言中创建http请求
shoothao
httpswift
概述:本文通过实例从同步和异步两种方式上回答了”如何在Swift语言中创建http请求“的问题。
如果你对Objective-C比较了解的话,对于如何创建http请求你一定驾轻就熟了,而新语言Swift与其相比只有语法上的区别。但是,对才接触到这个崭新平台的初学者来说,他们仍然想知道“如何在Swift语言中创建http请求?”。
在这里,我将作出一些建议来回答上述问题。常见的
- Spring事务的传播方式
uule
spring事务
传播方式:
新建事务
required
required_new - 挂起当前
非事务方式运行
supports
&nbs

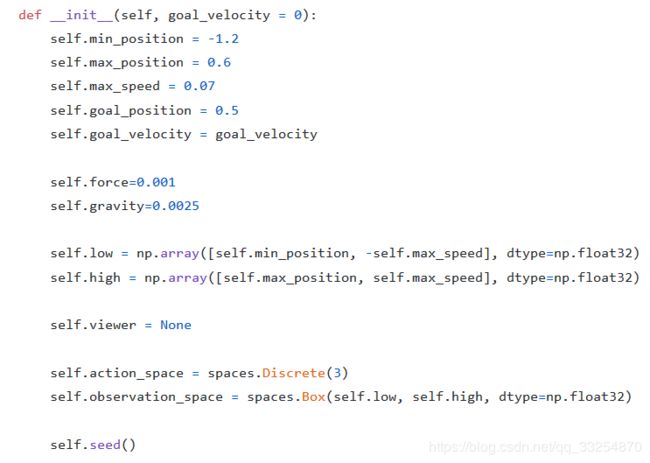
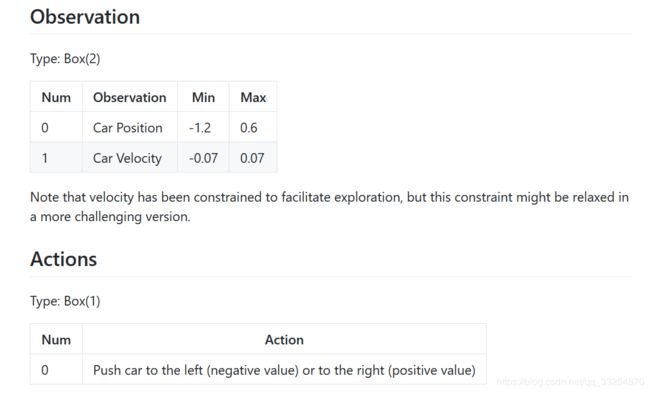
 Discrete类型比较容易理解,是离散的一维数组,比如:Discrete(3) -------》[0,1, 2]。
Discrete类型比较容易理解,是离散的一维数组,比如:Discrete(3) -------》[0,1, 2]。