Tensorflow2.0之卷积变分自编码器(CVAE)
文章目录
- 变分自编码器原理
- 第一阶段
- 第二阶段
- 第三阶段
- 第四阶段(重参数技巧)
- VAE的本质
- 代码实现
- 1、导入需要的库
- 2、导入数据集
- 3、图像处理
- 增加维度
- 标准化
- 二值化
- 使用 tf.data 来将数据分批和打乱
- 4、建立CVAE模型
- 5、初始化优化器
- 6、定义损失函数
- 定义正态分布概率密度的对数
- 计算损失
- 对以上代码中的变量进行分析
- 取一批训练集样本
- 将样本输入编码器
- 重参数过程
- 将 Z 输入解码器
- 交叉熵损失
- KL散度损失
- 7、定义梯度下降函数
- 8、定义显示图像函数
- 9、训练模型
- 参考资料
变分自编码器原理
变分自编码器是一个从隐变量 Z Z Z 生成目标数据 X X X 的模型。更准确地讲,它先假设 Z Z Z 服从某些常见的分布(比如正态分布或均匀分布),然后希望训练一个模型 X = g ( Z ) X=g(Z) X=g(Z),这个模型能够将原来的概率分布映射到训练集的概率分布,也就是说,其目的是进行分布之间的变换。
 接下来,此文章将具体描述 V A E VAE VAE 的构建思路。
接下来,此文章将具体描述 V A E VAE VAE 的构建思路。
第一阶段
首先我们有一批数据样本 X 1 , … , X N {X_1,…,X_N} X1,…,XN,其整体用 X X X 表示,我们可以根据 X 1 , … , X N {X_1,…,X_N} X1,…,XN 得到 X X X 的分布 p ( X ) p(X) p(X),然后直接根据 p ( X ) p(X) p(X) 来采样,就可以得到所有可能的 X X X 了(包括 X 1 , … , X n {X1,…,Xn} X1,…,Xn 以外的),这样一来,生成模型就实现了。
但在实际上我们是得不到 X X X 的分布的,于是我们将 p ( X ) p(X) p(X) 重新定义为:
p ( X ) = ∑ Z p ( X ∣ Z ) p ( Z ) p(X)=\sum_Zp(X|Z)p(Z) p(X)=Z∑p(X∣Z)p(Z)
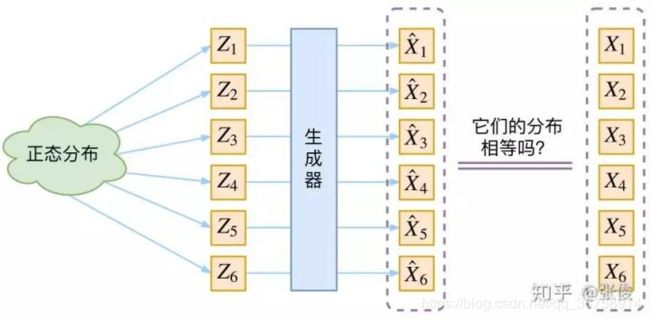
在上式中, p ( X ∣ Z ) p(X|Z) p(X∣Z) 是由 Z Z Z 生成 X X X 的模型,假设 Z Z Z 服从标准正态分布,也就是 p ( Z ) = N ( 0 , 1 ) p(Z)=N(0,1) p(Z)=N(0,1),那么我们就可以先从标准正态分布中采样一个 Z Z Z,然后根据 Z Z Z 来算一个 X X X,也可以达到生成目的。此时 V A E VAE VAE 的示意图为:
但是我们其实完全不清楚,究竟经过重新采样出来的 Z k Z_k Zk,是不是还对应着原来的 X k X_k Xk,所以我们如果直接最小化 D ( X ^ k , X k ) 2 D(\hat{X}_k,X_k)^2 D(X^k,Xk)2(这里 D D D 代表某种距离函数)是很不科学的。
第二阶段
其实,在整个 V A E VAE VAE 模型中,我们并没有去使用 p ( Z ) p(Z) p(Z)(先验分布)是正态分布的这个假设,而是假设 p ( Z ∣ X ) p(Z|X) p(Z∣X)(后验分布)是正态分布。
具体来说,给定一个真实样本 X k X_k Xk,我们假设存在一个专属于 X k X_k Xk 的分布 p ( Z ∣ X k ) p(Z|X_k) p(Z∣Xk)(学名叫后验分布),并进一步假设这个分布是(独立的、多元的)正态分布。
所以现在 p ( Z ∣ X k ) p(Z|X_k) p(Z∣Xk) 专属于 X k X_k Xk,我们有理由说从这个分布采样出来的 Z Z Z 应该要还原到 X k X_k Xk 中去。
接下来,我们需要找出专属于样本 X k X_k Xk 的正态分布 p ( Z ∣ X k ) p(Z|X_k) p(Z∣Xk) 的均值 μ \mu μ 和方差 σ 2 \sigma^2 σ2。
于是我们构建两个神经网络 μ k = f 1 ( X k ) \mu_k=f_1(X_k) μk=f1(Xk), l o g ( σ k 2 ) = f 2 ( X k ) log(\sigma_k^2)=f_2(X_k) log(σk2)=f2(Xk) 来算它们。之所以选择拟合 l o g ( σ k 2 ) log(\sigma_k^2) log(σk2) 而不是直接拟合 σ k 2 \sigma_k^2 σk2,是因为 σ k 2 \sigma_k^2 σk2 总是非负的,需要加激活函数处理,而拟合 l o g ( σ k 2 ) log(\sigma_k^2) log(σk2) 不需要加激活函数,因为它可正可负。
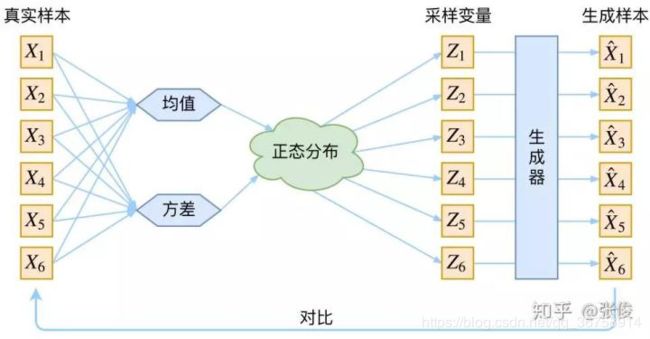
得到 μ k \mu_k μk 和 σ k 2 \sigma_k^2 σk2 之后, p ( Z ∣ X k ) p(Z|X_k) p(Z∣Xk) 的正态分布就已经确定了,此时从其中采样一个 Z k Z_k Zk 出来,然后经过一个生成器得到 X ^ k = g ( Z k ) \hat{X}_k=g(Z_k) X^k=g(Zk)。这之后,我们可以放心地最小化 D ( X ^ k , X k ) 2 D(\hat{X}_k,X_k)^2 D(X^k,Xk)2 了,因为 Z k Z_k Zk 是从专属 X k X_k Xk 的分布中采样出来的,这个生成器应该要把开始的 X k X_k Xk 还原回来。于是此时 V A E VAE VAE 的示意图为:
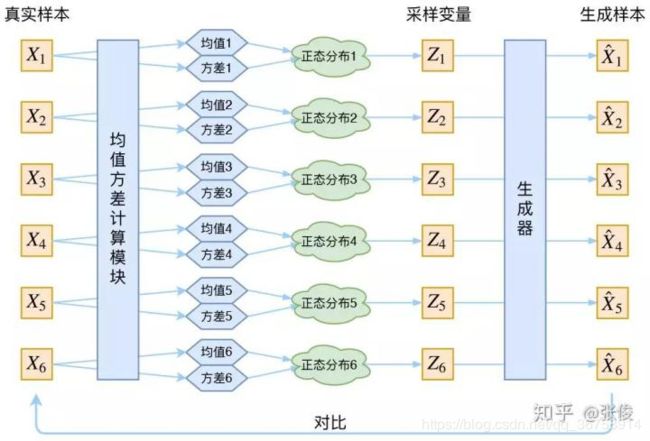 事实上, V A E VAE VAE 是为每个样本构造专属的正态分布,然后采样来重构。
事实上, V A E VAE VAE 是为每个样本构造专属的正态分布,然后采样来重构。
第三阶段
首先,我们希望重构 X X X,也就是最小化 D ( X ^ k , X k ) 2 D(\hat{X}_k,X_k)^2 D(X^k,Xk)2,但是这个重构过程受到噪声的影响,因为 Z k Z_k Zk 是通过重新采样得到的,而不是直接由 E n c o d e r Encoder Encoder 算出来的。
显然噪声会增加重构的难度,不过好在这个噪声强度(也就是方差)是通过一个神经网络算出来的,所以最终模型为了重构得更好,肯定会想尽办法让方差为0。
而方差为0的话,也就没有随机性了,所以不管怎么采样其实都只是得到确定的结果(也就是均值),只拟合一个当然比拟合多个要容易,而均值是通过另外一个神经网络算出来的。
也就是说,模型会慢慢退化成普通的 A u t o E n c o d e r AutoEncoder AutoEncoder,噪声不再起作用。
为了防止了噪声为零,同时保证模型具有生成能力, V A E VAE VAE 还让所有的 p ( Z ∣ X ) p(Z|X) p(Z∣X) 都向标准正态分布看齐。
也就是说,如果所有的 p ( Z ∣ X ) p(Z|X) p(Z∣X) 都很接近标准正态分布 N ( 0 , 1 ) N(0, 1) N(0,1),那么根据定义:
p ( Z ) = ∑ X p ( Z ∣ X ) p ( X ) = ∑ X N ( 0 , 1 ) p ( X ) = N ( 0 , 1 ) ∑ X p ( X ) = N ( 0 , 1 ) p(Z)=\sum_{X}p(Z|X)p(X)=\sum_{X}N(0, 1)p(X)=N(0, 1)\sum_{X}p(X)=N(0, 1) p(Z)=X∑p(Z∣X)p(X)=X∑N(0,1)p(X)=N(0,1)X∑p(X)=N(0,1)
这样我们就能达到我们的先验假设: p ( Z ) p(Z) p(Z) 是标准正态分布。然后我们就可以放心地从 N ( 0 , 1 ) N(0, 1) N(0,1) 中采样来生成图像了。即:

那么,如何让所有的 p ( Z ∣ X ) p(Z|X) p(Z∣X) 都向 N ( 0 , 1 ) N(0, 1) N(0,1) 看齐呢?此时,我们使用一般(各分量独立的)正态分布与标准正态分布的 K L KL KL 散度 K L ( N ( μ , σ 2 ) ∣ ∣ N ( 0 , 1 ) ) KL(N(\mu, \sigma^2)||N(0, 1)) KL(N(μ,σ2)∣∣N(0,1)) 作为额外的 l o s s loss loss,计算结果为:
L μ , σ 2 = 1 2 ∑ i = 1 d ( μ ( i ) 2 + σ ( i ) 2 − l o g ( σ ( i ) 2 ) − 1 ) L_{\mu, \sigma^2}=\frac{1}{2}\sum_{i=1}^{d}(\mu_{(i)}^2+\sigma_{(i)}^2-log(\sigma_{(i)}^2)-1) Lμ,σ2=21i=1∑d(μ(i)2+σ(i)2−log(σ(i)2)−1)
上式中的 d d d 是隐变量 Z Z Z 的维度,而 μ ( i ) \mu_{(i)} μ(i) 和 σ ( i ) 2 \sigma_{(i)}^2 σ(i)2分别代表一般正态分布的均值向量和方差向量的第 i i i 个分量。
上式的推导过程:
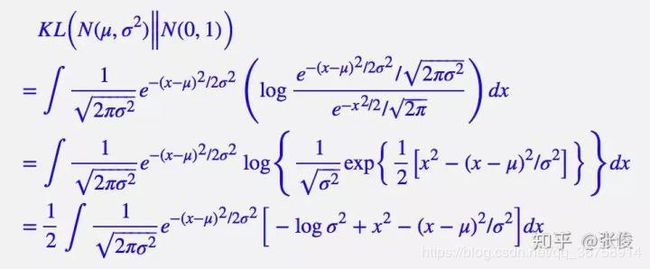 整个结果分为三项积分,第一项实际上就是 − l o g ( σ 2 ) -log(\sigma^2) −log(σ2) 乘以概率密度的积分(也就是 1),所以结果是 − l o g ( σ 2 ) -log(\sigma^2) −log(σ2);第二项实际是正态分布的二阶矩,为 μ 2 + σ 2 \mu^2+\sigma^2 μ2+σ2;而根据定义,第三项实际上就是“减均值除以方差=1”。所以总结果就是:
整个结果分为三项积分,第一项实际上就是 − l o g ( σ 2 ) -log(\sigma^2) −log(σ2) 乘以概率密度的积分(也就是 1),所以结果是 − l o g ( σ 2 ) -log(\sigma^2) −log(σ2);第二项实际是正态分布的二阶矩,为 μ 2 + σ 2 \mu^2+\sigma^2 μ2+σ2;而根据定义,第三项实际上就是“减均值除以方差=1”。所以总结果就是:
第四阶段(重参数技巧)
其实很简单,就是我们要从 p ( Z ∣ X k ) p(Z|X_k) p(Z∣Xk) 中采样一个 Z k Z_k Zk 出来,尽管我们知道了 p ( Z ∣ X k ) p(Z|X_k) p(Z∣Xk) 是正态分布,但是均值方差都是靠模型算出来的,我们要靠这个过程反过来优化均值方差的模型,但是“采样”这个操作是不可导的,而采样的结果是可导的,于是我们利用一个事实:从 N ( μ , σ 2 ) N(\mu, \sigma^2) N(μ,σ2) 中采样一个 Z Z Z,相当于从 N ( 0 , 1 ) N(0, 1) N(0,1) 中采样一个 ϵ \epsilon ϵ,然后让 Z = μ + ϵ × σ Z=\mu+\epsilon \times \sigma Z=μ+ϵ×σ。即:

所以,我们将从 N ( μ , σ 2 ) N(\mu, \sigma^2) N(μ,σ2) 采样变成了从 N ( 0 , 1 ) N(0, 1) N(0,1) 中采样,然后通过参数变换得到从 N ( μ , σ 2 ) N(\mu, \sigma^2) N(μ,σ2) 中采样的结果。这样一来,“采样”这个操作就不用参与梯度下降了,改为采样的结果参与,使得整个模型可训练了。
VAE的本质
V A E VAE VAE 虽然也是 A u t o E n c o d e r AutoEncoder AutoEncoder 的一种,但它的原理有所不同。
在 V A E VAE VAE 中,它的 E n c o d e r Encoder Encoder 有两个,一个用来计算均值,一个用来计算方差,这是别具一格的。
它本质上就是在我们常规的自编码器的基础上,对 E n c o d e r Encoder Encoder 的结果(在 V A E VAE VAE 中对应着计算均值的网络)加上了“高斯噪声”,使得结果 D e c o d e r Decoder Decoder 能够对噪声有鲁棒性;而那个额外的 K L l o s s KL loss KLloss(目的是让均值为 0,方差为 1),事实上就是相当于对 E n c o d e r Encoder Encoder 的一个正则项,希望 E n c o d e r Encoder Encoder 出来的东西均有零均值。
那另外一个 E n c o d e r Encoder Encoder(对应着计算方差的网络)用来动态调节噪声的强度的。
直觉上来想,当 D e c o d e r Decoder Decoder还没有训练好时(重构误差远大于 K L l o s s KL loss KLloss),就会适当降低噪声( K L l o s s KL loss KLloss 增加),使得拟合起来容易一些(重构误差开始下降)。
反之,如果 D e c o d e r Decoder Decoder 训练得还不错时(重构误差小于 K L l o s s KL loss KLloss),这时候噪声就会增加( K L l o s s KL loss KLloss 减少),使得拟合更加困难了(重构误差又开始增加),这时候 D e c o d e r Decoder Decoder 就要想办法提高它的生成能力了。

代码实现
1、导入需要的库
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
from IPython import display
2、导入数据集
(train_images, _), (test_images, _) = tf.keras.datasets.mnist.load_data()
3、图像处理
增加维度
train_images = train_images.reshape(train_images.shape[0], 28, 28, 1).astype('float32')
test_images = test_images.reshape(test_images.shape[0], 28, 28, 1).astype('float32')
标准化
# 标准化图片到区间 [0., 1.] 内
train_images /= 255.
test_images /= 255.
二值化
# 二值化
train_images[train_images >= .5] = 1.
train_images[train_images < .5] = 0.
test_images[test_images >= .5] = 1.
test_images[test_images < .5] = 0.
使用 tf.data 来将数据分批和打乱
TRAIN_BUF = 60000
BATCH_SIZE = 100
TEST_BUF = 10000
train_dataset = tf.data.Dataset.from_tensor_slices(train_images).shuffle(TRAIN_BUF).batch(BATCH_SIZE)
test_dataset = tf.data.Dataset.from_tensor_slices(test_images).shuffle(TEST_BUF).batch(BATCH_SIZE)
4、建立CVAE模型
class CVAE(tf.keras.Model):
def __init__(self, latent_dim):
super(CVAE, self).__init__()
self.latent_dim = latent_dim
self.inference_net = tf.keras.Sequential(
[
tf.keras.layers.InputLayer(input_shape=(28, 28, 1)),
tf.keras.layers.Conv2D(
filters=32, kernel_size=3, strides=(2, 2), activation='relu'),
tf.keras.layers.Conv2D(
filters=64, kernel_size=3, strides=(2, 2), activation='relu'),
tf.keras.layers.Flatten(),
# No activation
tf.keras.layers.Dense(latent_dim + latent_dim),
]
)
self.generative_net = tf.keras.Sequential(
[
tf.keras.layers.InputLayer(input_shape=(latent_dim,)),
tf.keras.layers.Dense(units=7*7*32, activation=tf.nn.relu),
tf.keras.layers.Reshape(target_shape=(7, 7, 32)),
tf.keras.layers.Conv2DTranspose(
filters=64,
kernel_size=3,
strides=(2, 2),
padding="SAME",
activation='relu'),
tf.keras.layers.Conv2DTranspose(
filters=32,
kernel_size=3,
strides=(2, 2),
padding="SAME",
activation='relu'),
# No activation
tf.keras.layers.Conv2DTranspose(
filters=1, kernel_size=3, strides=(1, 1), padding="SAME"),
]
)
def sample(self, eps=None):
if eps is None:
eps = tf.random.normal(shape=(100, self.latent_dim))
return self.decode(eps, apply_sigmoid=True)
def encode(self, x):
mean, logvar = tf.split(self.inference_net(x), num_or_size_splits=2, axis=1)
return mean, logvar
def reparameterize(self, mean, logvar):
eps = tf.random.normal(shape=mean.shape)
return eps * tf.exp(logvar * .5) + mean
def decode(self, z, apply_sigmoid=False):
logits = self.generative_net(z)
if apply_sigmoid:
probs = tf.sigmoid(logits)
return probs
return logits
其中,
- latent_dim 是指要用多少个噪声点生成一张图像。
- 在 tf.keras.layers.Dense(latent_dim + latent_dim) 中,输出的维度之所以为两个 latent_dim,是因为我们希望 inference_net 的输出是均值和方差(的对数),所以 inference_net (也就是 Encoder)可以被看成两个神经网络。
- sample() 函数用于将噪声输入 D e c o d e r Decoder Decoder,即 X ^ = g ( Z ) \hat{X}=g(Z) X^=g(Z) 的过程。
- encode() 函数是编码过程,有两个输出,分别对应 μ k = f 1 ( X k ) \mu_k=f_1(X_k) μk=f1(Xk) 和 l o g ( σ k 2 ) = f 2 ( X k ) log(\sigma_k^2)=f_2(X_k) log(σk2)=f2(Xk)。其中, μ k \mu_k μk 和 l o g ( σ k 2 ) log(\sigma_k^2) log(σk2) 都是 latent_dim 维的向量。
- reparameterize() 函数对应着重采样过程,即 Z = μ + ϵ × σ Z=\mu+\epsilon \times \sigma Z=μ+ϵ×σ,其中 ϵ \epsilon ϵ 是从 N ( 0 , 1 ) N(0, 1) N(0,1) 中采样出来的,经过从 ϵ \epsilon ϵ 到 Z Z Z 的变换后得到的结果,与直接从 N ( μ , σ 2 ) N(\mu, \sigma^2) N(μ,σ2) 中采样一个 Z Z Z 一致。
- decode() 函数即 sample() 函数的具体实现过程。
5、初始化优化器
optimizer = tf.keras.optimizers.Adam(1e-4)
6、定义损失函数
定义正态分布概率密度的对数
正态分布的概率密度为:
所以其对数为:
− 1 2 [ ( x − μ ) 2 σ 2 + l n ( 2 π σ 2 ) ] -\frac{1}{2}[\frac{(x-\mu)^2}{\sigma^2}+ln(2\pi \sigma^2)] −21[σ2(x−μ)2+ln(2πσ2)]
def log_normal_pdf(sample, mean, logvar, raxis=1):
# 正态分布概率密度的对数
log2pi = tf.math.log(2. * np.pi)
return tf.reduce_sum(
-.5 * ((sample - mean) ** 2. * tf.exp(-logvar) + logvar + log2pi),
axis=raxis)
计算损失
经过第一部分的原理分析,在变分自编码器中,其损失除了常规的交叉熵损失之外,还有关于 K L KL KL 散度的损失。
def compute_loss(model, x):
mean, logvar = model.encode(x)
z = model.reparameterize(mean, logvar)
x_logit = model.decode(z)
cross_ent = tf.reduce_sum(tf.nn.sigmoid_cross_entropy_with_logits(logits=x_logit, labels=x), axis=[1, 2, 3])
KLD = -0.5 * tf.reduce_sum(1 + logvar- tf.pow(mean, 2) - tf.exp(logvar), axis=-1)
return tf.reduce_mean(cross_ent + KLD)
对以上代码中的变量进行分析
取一批训练集样本
for x in train_dataset.take(1):
print(x.shape)
(100, 28, 28, 1)
即一批样本包含100个样本。
将样本输入编码器
model = CVAE(latent_dim)
mean, logvar = model.encode(x)
print(mean.shape)
print(logvar.shape)
(100, 50)
(100, 50)
即每个样本对应的正态分布的均值和方差(的对数)都是50维向量。
重参数过程
z = model.reparameterize(mean, logvar)
print(z.shape)
(100, 50)
因为重参数过程中有 Z = μ + ϵ × σ Z=\mu+\epsilon \times \sigma Z=μ+ϵ×σ,所以每个采样样本 Z Z Z 的维度是和噪声维度相同的,即50维。
将 Z 输入解码器
x_logit = model.decode(z)
print(x_logit.shape)
(100, 28, 28, 1)
即最终得到的形状和最早输入的形状一致。
交叉熵损失
cross_ent = tf.reduce_sum(tf.nn.sigmoid_cross_entropy_with_logits(logits=x_logit, labels=x), axis=[1, 2, 3])
print(cross_ent.shape)
(100,)
其中的 axis=[1, 2, 3] 表示这个操作是在后三个维度上进行(因为 x 和 x_logit 都是四维的),即最终结果的形状将只剩下第一维度(即 [ 100 , 28 , 28 , 1 ] → [ 100 , ] [100, 28, 28, 1] \rightarrow [100, ] [100,28,28,1]→[100,])。
KL散度损失
KLD = -0.5 * tf.reduce_sum(1 + logvar- tf.pow(mean, 2) - tf.exp(logvar), axis=-1)
print(KLD.shape)
(100,)
其中的 axis=-1 表示这个操作是在最后一个维度上进行( mean 和 logvar 都是二维的),即最终结果的形状将只剩下第一维度(即 [ 100 , 50 ] → [ 100 , ] [100, 50] \rightarrow [100, ] [100,50]→[100,])。
7、定义梯度下降函数
def compute_apply_gradients(model, x, optimizer):
with tf.GradientTape() as tape:
loss = compute_loss(model, x)
gradients = tape.gradient(loss, model.trainable_variables)
optimizer.apply_gradients(zip(gradients, model.trainable_variables))
8、定义显示图像函数
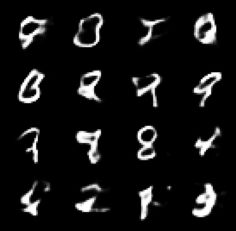
def generate_and_save_images(model, epoch, test_input):
predictions = model.sample(test_input)
fig = plt.figure(figsize=(4,4))
for i in range(predictions.shape[0]):
plt.subplot(4, 4, i+1)
plt.imshow(predictions[i, :, :, 0], cmap='gray')
plt.axis('off')
# tight_layout 最小化两个子图之间的重叠
plt.savefig('image_at_epoch_{:04d}.png'.format(epoch))
plt.show()
9、训练模型
epochs = 100
latent_dim = 50
num_examples_to_generate = 16
# 保持随机向量恒定以进行生成(预测),以便更易于看到改进。
random_vector_for_generation = tf.random.normal(
shape=[num_examples_to_generate, latent_dim])
model = CVAE(latent_dim)
generate_and_save_images(model, 0, random_vector_for_generation)
for epoch in range(1, epochs + 1):
for train_x in train_dataset:
compute_apply_gradients(model, train_x, optimizer)
if epoch % 1 == 0:
loss = tf.keras.metrics.Mean()
for test_x in test_dataset:
loss(compute_loss(model, test_x))
elbo = loss.result()
display.clear_output(wait=False)
print('Epoch: {}, Test set ELBO: {}, '.format(epoch,
elbo))
generate_and_save_images(
model, epoch, random_vector_for_generation)
参考资料
变分自编码器VAE:原来是这么一回事 | 附开源代码