【目标检测】YOLOv2代码实现之TensorFlow
文章目录
- 一.代码资源下载:
- 二、源码解析
- 2.1 yolo2_data文件夹
- 2.2 yolo2_model文件夹
- 2.3 config.py
- 2.4 decode.py
- 2.5 Loss.py
- 2.6 main.py
- 2.7model_darknet19.py
- 2.8utils.py
一.代码资源下载:
1.代码下载:https://github.com/KOD-Chen/YOLOv2-Tensorflow
2.模型下载:https://pan.baidu.com/s/1ZeT5HerjQxyUZ_L9d3X52w
3.打开下载的项目,并新建文件夹yolo2_model
4.将下载好的模型放入yolo2_model
文件夹下。
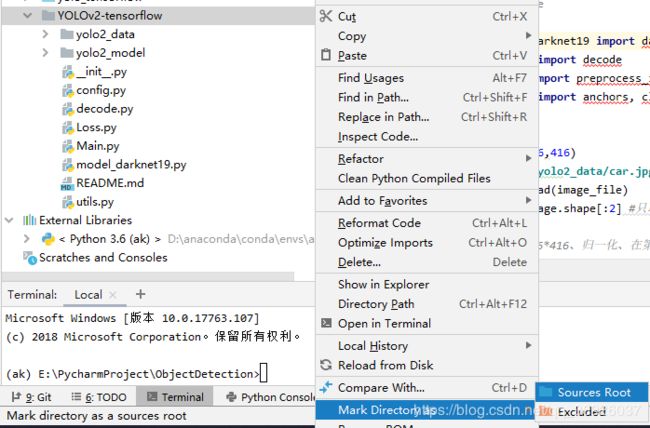
5.一些改动:
1)将项目转变为sources root
2)修改main.py

二、源码解析
项目全部文件:
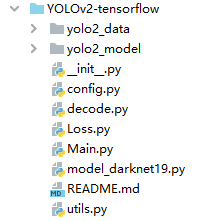
2.1 yolo2_data文件夹
存放测试图片,还有类别信息文件。
2.2 yolo2_model文件夹
存放下载解压后的模型
2.3 config.py
配置信息
#anchor boxes的尺寸
anchors = [[0.57273, 0.677385],
[1.87446, 2.06253],
[3.33843, 5.47434],
[7.88282, 3.52778],
[9.77052, 9.16828]]
#coco数据集的80个classes类别名称
def read_coco_labels():
f = open("./yolo2_data/coco_classes.txt")
class_names = []
for l in f.readlines():
l = l.strip() # 去掉回车'\n'
class_names.append(l)#将类别一个一个读入列表
return class_names
class_names = read_coco_labels()#class_names为数据集的80个类别名组成的列表
2.4 decode.py
解码darknet19网络的特征图,得到边界框信息,置信度以及类别概率。
import tensorflow as tf
#本py文件,将darknet的输出即特征图,转化为预测的边界框信息:(边界框左上即右下坐标,置信度,类别概率)
def decode(model_output,output_sizes=(13,13),num_class=80,anchors=None):
'''
model_output:darknet19网络输出的特征图
output_sizes:darknet19网络输出的特征图大小,默认是13*13(输入416*416,下采样32)
'''
H, W = output_sizes
num_anchors = len(anchors) # 这里的anchor是在configs文件中设置的,论文中的anchor boxes是通过dimension cluster得到的,这里做出了简化
anchors = tf.constant(anchors, dtype=tf.float32) # 将传入的anchors转变成tf格式的常量列表
'''将darknet19网络的输出进行处理:张量(批量大小,图征图高,特征图宽,anchor box数量,边界框信息+置信度+类别)'''
# 将darknet最后一层卷积输出的特征图进行reshape得到张量: 13*13*num_anchors*(num_class+5),第一个维度自适应batchsize
##张量:(批量大小,图征图高,特征图宽,anchor box数量,边界框信息+置信度+类别)即(-1,13,13,num_anchors,4+1+80)
detection_result = tf.reshape(model_output , [-1,H*W,num_anchors,num_class+5])
'''将darknet19网络的输出转化为预测信息 —— 边界框偏移量、置信度、类别概率'''
xy_offset = tf.nn.sigmoid(detection_result[:,:,:,0:2]) # 中心坐标相对于该cell左上角的偏置,sigmoid函数归一化到0-1
wh_offset = tf.exp(detection_result[:,:,:,2:4]) #相对于anchor box的高和宽偏置
obj_probs = tf.nn.sigmoid(detection_result[:,:,:,4]) # 置信度,sigmoid函数归一化到0-1
class_probs = tf.nn.softmax(detection_result[:,:,:,5:]) # 类别'得分',用softmax转变成类别概率
# 构建特征图每个cell的左上角的xy坐标
height_index = tf.range(H,dtype=tf.float32) # range(0,13)
width_index = tf.range(W,dtype=tf.float32) # range(0,13)
#用法: [A,B]=Meshgrid(a,b),生成size(b)Xsize(a)大小的矩阵A和B。
# 它相当于a从一行重复增加到size(b)行,把b转置成一列再重复增加到size(a)列
# 变成x_cell=[[0,1,...,12],...,[0,1,...,12]]和y_cell=[[0,0,...,0],[1,...,1]...,[12,...,12]]
x_cell,y_cell = tf.meshgrid(height_index,width_index)
x_cell = tf.reshape(x_cell,[1,-1,1]) # 和上面[H*W,num_anchors,num_class+5]对应
y_cell = tf.reshape(y_cell,[1,-1,1])
'''将预测的边界框转变为相对于整张图片的位置和大小:4个值均在0和1之间'''
bbox_x = (x_cell + xy_offset[:,:,:,0]) / W
bbox_y = (y_cell + xy_offset[:,:,:,1]) / H
bbox_w = (anchors[:,0] * wh_offset[:,:,:,0]) / W
bbox_h = (anchors[:,1] * wh_offset[:,:,:,1]) / H
# 中心坐标+宽高box(x,y,w,h) -> xmin=x-w/2 -> 左上+右下box(xmin,ymin,xmax,ymax)
'''将边界框由(中心x,中心y,w,h)表示,转换为(左上x,左上y,右下x,右下y)表示'''
bboxes = tf.stack([bbox_x-bbox_w/2, bbox_y-bbox_h/2,
bbox_x+bbox_w/2, bbox_y+bbox_h/2], axis=3)
return bboxes, obj_probs, class_probs#返回边界框左上和右下坐标,置信度信息,类别预测信息
2.5 Loss.py
损失函数计算,由于本项目只是yolov2的检测实现,使用预训练好的模型,因此不包含网络训练,不需要使用loss函数,此部分只是有助于理解损失函数。
import numpy as np
import tensorflow as tf
def compute_loss(predictions,targets,anchors,scales,num_classes=20,output_size=(13,13)):
'''
:param predictions: 预测边框
:param targets: 真值框
:param anchors: anchor box列表,列表中的每一个元素包含一个anchor box的高和宽
:param scales:
:param num_classes: 类别的数量
:param output_size: darknet网络输出特征图的尺寸
:return:
'''
W,H = output_size#darknet输出特征图的尺寸
C = num_classes#类别数量
B = len(anchors)#anchor box的数量
anchors = tf.constant(anchors,dtype=tf.float32)#将anchor box转变为tf的常量
anchors = tf.reshape(anchors,[1,1,B,2]) # 存放anchors box的高和宽
'''【1】真值框信息处理'''
'''真值边界框:'''
sprob,sconf,snoob,scoor = scales # loss不同部分的前面系数
_coords = targets["coords"] #真实坐标xywh
_probs = targets["probs"] # 类别概率——one hot形式,C维
_confs = targets["confs"] #置信度,每个边界框一个
'''真值框转变为(左上x,左上y,右下x,右下y)的形式,计算真值框面积:'''
# ground truth计算IOU-->_up_left, _down_right
_wh = tf.pow(_coords[:, :, :, 2:4], 2) * np.reshape([W, H], [1, 1, 1, 2])
_areas = _wh[:, :, :, 0] * _wh[:, :, :, 1]#真值框的面积
_centers = _coords[:, :, :, 0:2]#真值框的中心坐标
_up_left, _down_right = _centers - (_wh * 0.5), _centers + (_wh * 0.5)#真值框的左上及右下坐标
'''真值框信息汇总'''
# ground truth汇总
# tf.expand_dims((input, axis=None,)在第axis位置增加一个维度
#tf.concat([tensor1, tensor2, tensor3,...], axis)
truths = tf.concat([_coords, tf.expand_dims(_confs, -1), _probs], 3)#拼接张量的函数tf.concat()
'''【2】预测边界框信息处理'''
'''获取预测边界框的信息:此部分代码在decode.py文件中也有类似的代码'''
# 将darknet19网络的输出进行处理:张量(批量大小,图征图高,特征图宽,anchor box数量,边界框信息+置信度+类别)
predictions = tf.reshape(predictions,[-1,H,W,B,(5+C)])
# 将darknet19网络的输出转化为预测信息 —— 边界框偏移量、置信度、类别概率
coords = tf.reshape(predictions[:,:,:,:,0:4],[-1,H*W,B,4])
coords_xy = tf.nn.sigmoid(coords[:,:,:,0:2]) # xy是相对于cell左上角的偏移量
coords_wh = tf.sqrt(tf.exp(coords[:,:,:,2:4])*anchors/np.reshape([W,H],[1,1,1,2])) # 除以特征图的尺寸13,将高和宽解码成相对于整张图片的wh
coords = tf.concat([coords_xy,coords_wh],axis=3) # [batch_size, H*W, B, 4]
'''获取预测边界框的置信度'''
confs = tf.nn.sigmoid(predictions[:,:,:,:,4])
confs = tf.reshape(confs,[-1,H*W,B,1]) # 每个边界框一个置信度,每个cell有B个边界框
'''获取预测边界框的类别概率'''
probs = tf.nn.softmax(predictions[:,:,:,:,5:]) # 网络最后输出是"得分",通过softmax变成概率
probs = tf.reshape(probs,[-1,H*W,B,C])
'''预测边界框转变为(左上x,左上y,右下x,右下y)的形式,计算预测边界框面积:'''
# prediction计算IOU-->up_left, down_right
wh = tf.pow(coords[:, :, :, 2:4], 2) * np.reshape([W, H], [1, 1, 1, 2])
areas = wh[:, :, :, 0] * wh[:, :, :, 1]
centers = coords[:, :, :, 0:2]
up_left, down_right = centers - (wh * 0.5), centers + (wh * 0.5)
'''预测边界框信息汇总'''
preds = tf.concat([coords,confs,probs],axis=3) # [-1, H*W, B, (4+1+C)]
'''【3】计算真值框和预测边界框的IOU:'''
# 计算IOU只考虑形状,先将anchor与ground truth的中心点都偏移到同一位置(cell左上角),然后计算出对应的IOU值。
# ①IOU值最大的那个anchor与ground truth匹配,对应的预测框用来预测这个ground truth:计算xywh、置信度c(目标值为1)、类别概率p误差。
# ②IOU小于某阈值的anchor对应的预测框:只计算置信度c(目标值为0)误差。
# ③剩下IOU大于某阈值但不是max的anchor对应的预测框:丢弃,不计算任何误差。
inter_upleft = tf.maximum(up_left, _up_left)#(预测框左上角,真值框左上角)
inter_downright = tf.minimum(down_right, _down_right)#(预测框右下角,真值框右下角)
inter_wh = tf.maximum(inter_downright - inter_upleft, 0.0)
intersects = inter_wh[:, :, :, 0] * inter_wh[:, :, :, 1]
ious = tf.truediv(intersects, areas + _areas - intersects)
best_iou_mask = tf.equal(ious, tf.reduce_max(ious, axis=2, keep_dims=True))
best_iou_mask = tf.cast(best_iou_mask, tf.float32)
mask = best_iou_mask * _confs # [-1, H*W, B]
mask = tf.expand_dims(mask, -1) # [-1, H*W, B, 1]
# 【4】计算各项损失所占的比例权重weight
confs_w = snoob * (1 - mask) + sconf * mask
coords_w = scoor * mask
probs_w = sprob * mask
weights = tf.concat([coords_w, confs_w, probs_w], axis=3)
# 【5】计算loss:ground truth汇总和prediction汇总均方差损失函数,再乘以相应的比例权重
loss = tf.pow(preds - truths, 2) * weights
loss = tf.reduce_sum(loss, axis=[1, 2, 3])
loss = 0.5 * tf.reduce_mean(loss)
return loss
2.6 main.py
本py文件使用预训练好的模型进行检测。
import tensorflow as tf
import cv2
from model_darknet19 import darknet
from decode import decode
from utils import preprocess_image, postprocess, draw_detection
from config import anchors, class_names
def main():
input_size = (416,416)#设置输入图片的大小
image_file = './yolo2_data/car.jpg'#图片路径
image = cv2.imread(image_file)#读取图片
image_shape = image.shape[:2] #只取wh,channel=3不取
# 调用utils.py中的preprocess_image函数,对输入图片进行预处理:copy、resize至416*416、归一化、在第0维增加存放batchsize维度
image_cp = preprocess_image(image,input_size)
#设置输入的占位placeholder
tf_image = tf.placeholder(tf.float32,[1,input_size[0],input_size[1],3])#s设置输入图像的占位placeholder
'''【1】获取网络预测图片的所有边界框'''
'''将图片输入darknet19网络,得到图片的特征图'''
model_output = darknet(tf_image) # darknet19网络输出的特征图
#图片的特征图大小:特征图是对原图下采样32倍得到的
output_sizes = input_size[0]//32, input_size[1]//32 # 特征图尺寸是图片下采样32倍
'''#特征图解码:调用decode.py的decode函数得到 边界框左上和右下坐标 、置信度、类别概率'''
output_decoded = decode(model_output=model_output,output_sizes=output_sizes,num_class=len(class_names),anchors=anchors) # 解码
model_path = "./yolo2_model/yolo2_coco.ckpt"
saver = tf.train.Saver()#TensorFlow通过tf.train.Saver类实现神经网络模型的保存和提取。tf.train.Saver() 模型保存和加载https://blog.csdn.net/qq_35290785/article/details/89646248
with tf.Session() as sess:
#模型的恢复用的是restore()函数,它需要两个参数restore(sess, save_path),
# save_path指的是保存的模型路径。我们可以使用tf.train.latest_checkpoint()来自动获取最后一次保存的模型。如:
saver.restore(sess,model_path)
#获取边界框,置信度,类别概率信息
bboxes,obj_probs,class_probs = sess.run(output_decoded,feed_dict={tf_image:image_cp})#将图片传入计算图
'''【2】筛选网络预测的边界框——NMS(post process后期处理)'''
#调用utils.py 的 postprocess函数进行非极大值抑制处理
bboxes,scores,class_max_index = postprocess(bboxes,obj_probs,class_probs,image_shape=image_shape)
'''【3】绘制筛选后的边界框'''
#调用utils.py的draw_detection函数
img_detection = draw_detection(image, bboxes, scores, class_max_index, class_names)
cv2.imwrite("./yolo2_data/detection.jpg", img_detection)
print('YOLO_v2 detection has done!')
cv2.imshow("detection_results", img_detection)
cv2.waitKey(0)
if __name__ == '__main__':
main()
2.7model_darknet19.py
本py文件用来构建darknet网络,通过网络来对输入图像进行特征提取。
import tensorflow as tf
################# 基础层:conv/pool/reorg(带passthrough的重组层) #############################################
'''# 激活函数'''
def leaky_relu(x):
return tf.nn.leaky_relu(x,alpha=0.1,name='leaky_relu') # 或者tf.maximum(0.1*x,x)
'''卷积+批量归一化层:yolo2中每个卷积层后面都有一个BN层'''
def conv2d(x,filters_num,filters_size,pad_size=0,stride=1,batch_normalize=True,
activation=leaky_relu,use_bias=False,name='conv2d'):
# padding,注意: 不用padding="SAME",否则可能会导致坐标计算错误
if pad_size > 0:
x = tf.pad(x,[[0,0],[pad_size,pad_size],[pad_size,pad_size],[0,0]])#填充
# 卷积层
out = tf.layers.conv2d(x,filters=filters_num,kernel_size=filters_size,strides=stride,padding='VALID',activation=None,use_bias=use_bias,name=name)
# 批量归一化:如果BN,将卷积层conv的输出进行批量归一化
if batch_normalize:
# 批量归一化层
out = tf.layers.batch_normalization(out,axis=-1,momentum=0.9,training=False,name=name+'_bn')
#将卷积层或者批量归一化后的输出进行激励函数处理
if activation:
out = activation(out)
return out#此函数进行一次conv+BN处理,得到输出
'''最大池化层'''
def maxpool(x,size=2,stride=2,name='maxpool'):
return tf.layers.max_pooling2d(x,pool_size=size,strides=stride)
'''透传层的数据准备:'''
# reorg layer(带passthrough的重组层)
def reorg(x,stride):
#tf.space_to_depth(x,block_size=2)相当于在高和宽的方向上每隔(block_size-1)像素采样
#将x特征图进行处理,使其能够与下层特征图进行拼接
return tf.space_to_depth(x,block_size=stride)
#########################################################################################################
################################### Darknet19 ###########################################################
# 默认是coco数据集,最后一层维度是anchor_num*(class_num+5)=5*(80+5)=425
'''darknet网络构建'''
def darknet(images,n_last_channels=425):
net = conv2d(images, filters_num=32, filters_size=3, pad_size=1, name='conv1')#调用自定义的conv+BN层
net = maxpool(net, size=2, stride=2, name='pool1')
net = conv2d(net, 64, 3, 1, name='conv2')
net = maxpool(net, 2, 2, name='pool2')
net = conv2d(net, 128, 3, 1, name='conv3_1')
net = conv2d(net, 64, 1, 0, name='conv3_2')
net = conv2d(net, 128, 3, 1, name='conv3_3')
net = maxpool(net, 2, 2, name='pool3')
net = conv2d(net, 256, 3, 1, name='conv4_1')
net = conv2d(net, 128, 1, 0, name='conv4_2')
net = conv2d(net, 256, 3, 1, name='conv4_3')
net = maxpool(net, 2, 2, name='pool4')
net = conv2d(net, 512, 3, 1, name='conv5_1')
net = conv2d(net, 256, 1, 0,name='conv5_2')
net = conv2d(net,512, 3, 1, name='conv5_3')
net = conv2d(net, 256, 1, 0, name='conv5_4')
net = conv2d(net, 512, 3, 1, name='conv5_5')
'''透传层的特征图存储及处理'''
shortcut = net # 存储这一层特征图,以便后面passthrough层
# shortcut增加了一个中间卷积层,先采用64个1*1卷积核进行卷积,然后再进行passthrough处理
# 这样26*26*512 -> 26*26*64 -> 13*13*256的特征图
shortcut = conv2d(shortcut, 64, 1, 0, name='conv_shortcut')
shortcut = reorg(shortcut, 2)#将透传层特征图由26*26*64转变为 13*13*256的特征图
net = maxpool(net, 2, 2, name='pool5')
net = conv2d(net, 1024, 3, 1, name='conv6_1')
net = conv2d(net, 512, 1, 0, name='conv6_2')
net = conv2d(net, 1024, 3, 1, name='conv6_3')
net = conv2d(net, 512, 1, 0, name='conv6_4')
net = conv2d(net, 1024, 3, 1, name='conv6_5')
net = conv2d(net, 1024, 3, 1, name='conv7_1')
net = conv2d(net, 1024, 3, 1, name='conv7_2')
'''将透传层处理后的特征图和net特征图进行拼接'''
net = tf.concat([shortcut, net], axis=-1)
net = conv2d(net, 1024, 3, 1, name='conv8')
'''最后一层detection layer:用一个1*1卷积去调整channel,该层没有BN层和激活函数'''
output = conv2d(net, filters_num=n_last_channels, filters_size=1, batch_normalize=False, activation=None, use_bias=True, name='conv_dec')
return output
#########################################################################################################
if __name__ == '__main__':
x = tf.random_normal([1, 416, 416, 3])
model_output = darknet(x)
saver = tf.train.Saver()
with tf.Session() as sess:
# 必须先restore模型才能打印shape;导入模型时,上面每层网络的name不能修改,否则找不到
saver.restore(sess, "./yolo2_model/yolo2_coco.ckpt")
print(sess.run(model_output).shape) # (1,13,13,425)
2.8utils.py
本py文件是工具文件,包含图片预处理函数,NMS非极大值抑制函数,边界框绘图函数。
# -*- coding: utf-8 -*-
# --------------------------------------
# @Time : 2018/5/16$ 14:48$
# @Author : KOD Chen
# @Email : [email protected]
# @File : utils$.py
# Description :功能函数,包含:预处理输入图片、筛选边界框NMS、绘制筛选后的边界框。
# --------------------------------------
import random
import colorsys
import cv2
import numpy as np
# 【1】图像预处理(pre process前期处理)
def preprocess_image(image,image_size=(416,416)):
# 复制原图像
image_cp = np.copy(image).astype(np.float32)
# resize image
image_rgb = cv2.cvtColor(image_cp,cv2.COLOR_BGR2RGB)#opencv读取的图片是BGR形式,将图片转换为RGB格式
image_resized = cv2.resize(image_rgb,image_size)#将图片resize至固定的大小
# normalize归一化
image_normalized = image_resized.astype(np.float32) / 225.0#将图片进行规范化处理
# 增加一个维度在第0维——batch_size
image_expanded = np.expand_dims(image_normalized,axis=0)
return image_expanded
# 【2】筛选解码后的回归边界框——NMS(post process后期处理)
def postprocess(bboxes,obj_probs,class_probs,image_shape=(416,416),threshold=0.5):
'''bboxes边界框处理:'''
# bboxes包含的信息:图片中预测的box,包含几个边界框就有几行;4列分别是box(xmin,ymin,xmax,ymax)
bboxes = np.reshape(bboxes,[-1,4])
# 将所有box还原成图片中真实的位置,因为decode的边界框信息,是相对于原图的大小在0-1之间,本操作找到边界框的真实位置信息
bboxes[:,0:1] *= float(image_shape[1]) # xmin*width
bboxes[:,1:2] *= float(image_shape[0]) # ymin*height
bboxes[:,2:3] *= float(image_shape[1]) # xmax*width
bboxes[:,3:4] *= float(image_shape[0]) # ymax*height
bboxes = bboxes.astype(np.int32)
# (1)cut the box:将边界框超出整张图片的部分cut掉
bbox_min_max = [0,0,image_shape[1]-1,image_shape[0]-1]
bboxes = bboxes_cut(bbox_min_max,bboxes)#调用bboxes_cut()函数
'''obj_probs置信度处理:'''
# ※※※置信度*max类别概率=类别置信度scores※※※
obj_probs = np.reshape(obj_probs,[-1])
'''class_probs类别概率处理:'''
class_probs = np.reshape(class_probs,[len(obj_probs),-1])#转换为边界框数量行,类别数量列
class_max_index = np.argmax(class_probs,axis=1) # 找到类别概率最大值对应的位置
class_probs = class_probs[np.arange(len(obj_probs)),class_max_index]
'''置信度×类别概率=类别置信度'''
scores = obj_probs * class_probs
'''类别置信度大于一定阈值的边界框保留,否者抛弃'''
# ※※※类别置信度scores>threshold的边界框bboxes留下※※※
keep_index = scores > threshold
class_max_index = class_max_index[keep_index]
scores = scores[keep_index]
bboxes = bboxes[keep_index]
# 按类别置信度scores降序,对边界框进行排序并仅保留top_k,排序top_k(默认为400)
class_max_index,scores,bboxes = bboxes_sort(class_max_index,scores,bboxes)
# ※※※(3)NMS※※※
class_max_index,scores,bboxes = bboxes_nms(class_max_index,scores,bboxes)
return bboxes,scores,class_max_index
# 【3】绘制筛选后的边界框
def draw_detection(im, bboxes, scores, cls_inds, labels, thr=0.3):
# Generate colors for drawing bounding boxes.
hsv_tuples = [(x/float(len(labels)), 1., 1.) for x in range(len(labels))]
colors = list(map(lambda x: colorsys.hsv_to_rgb(*x), hsv_tuples))
colors = list(
map(lambda x: (int(x[0] * 255), int(x[1] * 255), int(x[2] * 255)),colors))
random.seed(10101) # Fixed seed for consistent colors across runs.
random.shuffle(colors) # Shuffle colors to decorrelate adjacent classes.
random.seed(None) # Reset seed to default.
# draw image
imgcv = np.copy(im)
h, w, _ = imgcv.shape
for i, box in enumerate(bboxes):
if scores[i] < thr:
continue
cls_indx = cls_inds[i]
thick = int((h + w) / 300)
cv2.rectangle(imgcv,(box[0], box[1]), (box[2], box[3]),colors[cls_indx], thick)
mess = '%s: %.3f' % (labels[cls_indx], scores[i])
if box[1] < 20:
text_loc = (box[0] + 2, box[1] + 15)
else:
text_loc = (box[0], box[1] - 10)
# cv2.rectangle(imgcv, (box[0], box[1]-20), ((box[0]+box[2])//3+120, box[1]-8), (125, 125, 125), -1) # puttext函数的背景
cv2.putText(imgcv, mess, text_loc, cv2.FONT_HERSHEY_SIMPLEX, 1e-3*h, (255,255,255), thick//3)
return imgcv
# 将边界框超出整张图片的部分cut掉
def bboxes_cut(bbox_min_max,bboxes):
bboxes = np.copy(bboxes)
bboxes = np.transpose(bboxes)
bbox_min_max = np.transpose(bbox_min_max)
# cut the box
bboxes[0] = np.maximum(bboxes[0],bbox_min_max[0]) # xmin
bboxes[1] = np.maximum(bboxes[1],bbox_min_max[1]) # ymin
bboxes[2] = np.minimum(bboxes[2],bbox_min_max[2]) # xmax
bboxes[3] = np.minimum(bboxes[3],bbox_min_max[3]) # ymax
bboxes = np.transpose(bboxes)
return bboxes
# 按类别置信度scores降序,对边界框进行排序并仅保留top_k
def bboxes_sort(classes,scores,bboxes,top_k=400):
index = np.argsort(-scores)
classes = classes[index][:top_k]
scores = scores[index][:top_k]
bboxes = bboxes[index][:top_k]
return classes,scores,bboxes
# 计算两个box的IOU
def bboxes_iou(bboxes1,bboxes2):
bboxes1 = np.transpose(bboxes1)
bboxes2 = np.transpose(bboxes2)
# 计算两个box的交集:交集左上角的点取两个box的max,交集右下角的点取两个box的min
int_ymin = np.maximum(bboxes1[0], bboxes2[0])
int_xmin = np.maximum(bboxes1[1], bboxes2[1])
int_ymax = np.minimum(bboxes1[2], bboxes2[2])
int_xmax = np.minimum(bboxes1[3], bboxes2[3])
# 计算两个box交集的wh:如果两个box没有交集,那么wh为0(按照计算方式wh为负数,跟0比较取最大值)
int_h = np.maximum(int_ymax-int_ymin,0.)
int_w = np.maximum(int_xmax-int_xmin,0.)
# 计算IOU
int_vol = int_h * int_w # 交集面积
vol1 = (bboxes1[2] - bboxes1[0]) * (bboxes1[3] - bboxes1[1]) # bboxes1面积
vol2 = (bboxes2[2] - bboxes2[0]) * (bboxes2[3] - bboxes2[1]) # bboxes2面积
IOU = int_vol / (vol1 + vol2 - int_vol) # IOU=交集/并集
return IOU
# NMS,或者用tf.image.non_max_suppression(boxes, scores,self.max_output_size, self.iou_threshold)
def bboxes_nms(classes, scores, bboxes, nms_threshold=0.5):
keep_bboxes = np.ones(scores.shape, dtype=np.bool)
for i in range(scores.size-1):
if keep_bboxes[i]:
# Computer overlap with bboxes which are following.
overlap = bboxes_iou(bboxes[i], bboxes[(i+1):])
# Overlap threshold for keeping + checking part of the same class
keep_overlap = np.logical_or(overlap < nms_threshold, classes[(i+1):] != classes[i])
keep_bboxes[(i+1):] = np.logical_and(keep_bboxes[(i+1):], keep_overlap)
idxes = np.where(keep_bboxes)
return classes[idxes], scores[idxes], bboxes[idxes]
论文理解:https://editor.csdn.net/md/?articleId=105588117