【DIY】基于OpenMV的STM32追球小车
目录:
- 总体设计
- 1.基础硬件DIY设计
- 1)整体原理图
- 2)PCB电路
- 2.OpenMV简单识别程序设计 与 STM32控制程序设计
- 1)OpenMV简单识别程序设计【microPython】
- 2)STM32控制程序设计 【C语言】
- ①对OpenMV发送的数据包进行解析
- ②小车的简单PID控制
- ③系统状态设定
- 3.效果展示
- 1)整体效果图
- Github项目地址、设计下载
本帖相关分享资料整理【程序+原理图-手工PCB】,最后有下载链接
注:本文仅用于学习交流分享,[若有不妥之处,请指正,感谢]
关键词:【OpenMV】【颜色识别】【PID】【STM32】
最后面有程序与原理图PCB分享
用到的工具有:
- openMV IDE
- Keil 5 编译器
- Altium Designer
实现的小功能有:
①设别颜色小球,并自动追寻小球
②简单测试与颜色小球的粗略距离,并且在小球10cm处停车
③按键调节PID参数以及调节识别的颜色
总体设计
1.基础硬件DIY设计
2.openMV简单识别程序设计 与 单片机控制程序设计
3.效果展示
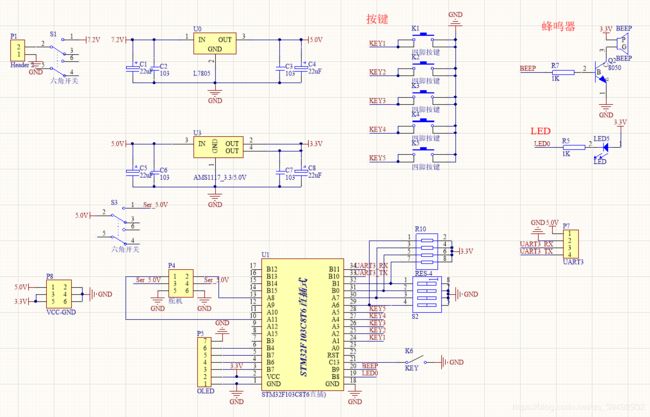
1.基础硬件DIY设计
电路硬件:
[MCU] STM32F103C8T6最小系统板
[稳压电源]【L7805】 7.2V稳压5.0V 【AMS1117-3.3】5.0V稳压3.3V
[外围电路] 按键、蜂鸣器、OLED、干簧管
1)整体原理图
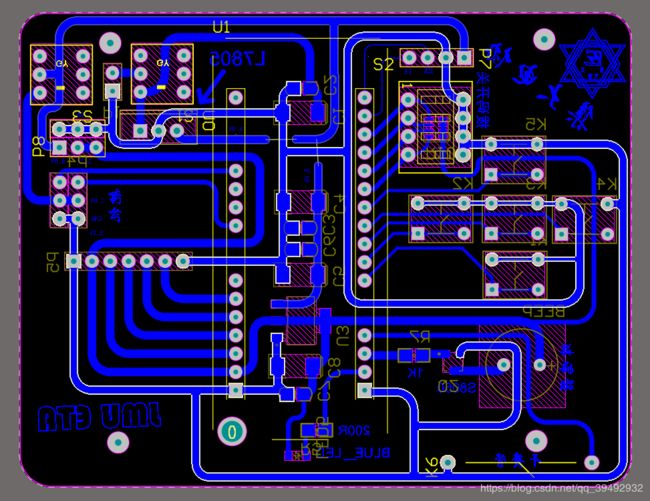
2)PCB电路
2.OpenMV简单识别程序设计 与 STM32控制程序设计
1)OpenMV简单识别程序设计【microPython】

识别小球颜色并通过串口定时发送小球坐标与距离的数据包
#2018.8.2 【microPython】
import sensor, image, time , pyb
from pyb import UART
from pyb import Timer
from pyb import LED
import json
led = pyb.LED(3) # Red LED = 1, Green LED = 2, Blue LED = 3, IR LEDs = 4.
thresholds = [(27, 67, 19, 91, 45, 76), # 红色
#(21, 75, 3, -38, 34, 68), # 绿色
(27, 90, -3, -28, 31, 125),
(0, 30, 0, 64, -128, 0)] # generic_blue_thresholds
threshold_index = 1 # 0 for red, 1 for gre9en, 2 for blue
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA) #320*240
sensor.skip_frames(time = 100)
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
clock = time.clock()
uart = UART(3, 115200)
uart.init(115200, bits=8, parity=None, stop=1, timeout_char=1000) # 使用给定参数初始化
def tick(timer): # we will receive the timer object when being called
global data
if blobs:
print("Find")
print('you send:',output_str)
uart.write(data)
tim = Timer(4, freq=10) # create a timer object using timer 4 - trigger at 1Hz
tim.callback(tick) # set the callback to our tick function
def find_max(blobs):
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
return max_blob
def Uart_Receive(): #UART接收 改变框小球的颜色阈值
global threshold_index
if uart.any():
temp_data = uart.readchar()
if temp_data==0: #红色
threshold_index=0
print(temp_data,threshold_index)
elif temp_data==1:
threshold_index=1
print(temp_data,threshold_index)
while(True):
clock.tick()
img = sensor.snapshot()
Uart_Receive()
blobs = img.find_blobs([thresholds[threshold_index]])
if blobs:
max_blob = find_max(blobs)
b = max_blob[0] #方框元组
L = (max_blob[2]+max_blob[3])/2
l=int(1000/L)
#x_error = max_blob[5]-img.width()/2 #求横向偏差
x_error = max_blob[5]-img.width()/2
img.draw_rectangle(max_blob[0:4]) # 画矩形
img.draw_cross(max_blob[5], max_blob[6]) # 画十字
#发送 小球的(x,y,l,n)
#x为横坐标,y为纵坐标,l为粗略的距离,n为小球颜色(0:红 1:绿)
output_str="%d,%d,%d,%d" % (max_blob.cx(),max_blob.cy(),l,threshold_index) #10进制字符包
checkout=0xAA+0x55+0x07+int(max_blob.cx()/2)+max_blob.cy()+l+threshold_index
data = bytearray([0xAA,0x55,0x07,int(max_blob.cx()/2),max_blob.cy(),l,threshold_index,0x00,0x00,checkout])#转成16进制
#uart.write(data)
time.sleep(1)
led.on()
else:
print("NO FIND")
data = bytearray([0xAA,0x55,0x07,0x00,0x00,0x00,0x00,0x00,0x00,0x06])
uart.write(data)
led.off()
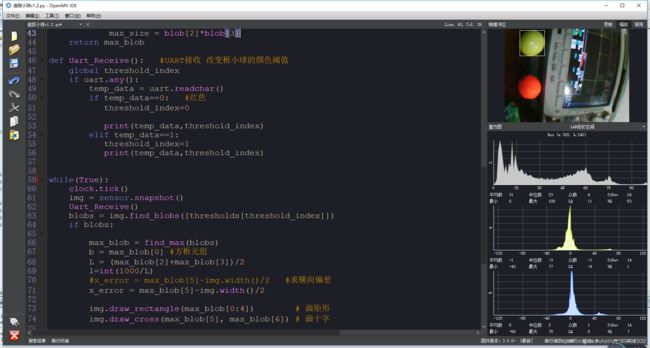 图3 抓取到绿色小球 图3 抓取到绿色小球
|
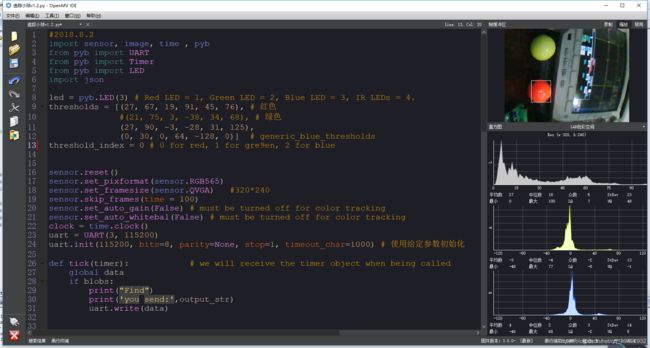 图4 抓取到红色小球 图4 抓取到红色小球
|
2)STM32控制程序设计 【C语言】
①对OpenMV发送的数据包进行解析
void USART1_IRQHandler(void) //串口1中断服务程序
{
uint8 i=0,j=0;
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{//接收中断
control_data[data_number]=USART_ReceiveData(USART1);
data_number++;
if(data_number<(MAX_DATA_LENS+4))
{ //定义数据长度未包括包头和包长3个字节,+4
if(control_data[0]==0xaa)//数据包包头字节
{
if(data_number>3)
{
if(control_data[1]==0x55)
{
if(data_number>=(control_data[2]+3))
{//接收完数据包(第三个字节为数据长度,数据长度不包含开头和校验字)
for(i=0;i<=(data_number-2);i++)
{
j +=control_data[i];
}
if(j==control_data[data_number-1]) //判断校验是否成功
{
j=0;
recv1_data_ok=1; //接收到正确完整数据包标志位置
}
else
{
recv1_data_ok=0;
}
j=0;
data_number=0;
}
}
else
{
recv1_data_ok=0;
data_number=0;
}
}
}
else
{
recv1_data_ok=0;
data_number=0;
}
}
else
{
recv1_data_ok=0;
data_number=0;
}
}
}
②小车的简单PID控制
#include "my_include.h"
extern CAR_STATUS_e car_mode;
extern moty_duty run_duty;
extern u8 control_data[MAX_DATA_LENS];
extern float C_P; //cameraP
extern float C_D; //cameraD
extern int16 ser_duty;
extern int16 x_error;
extern int16 last_x_error;
extern uint8 ball_colcor;
extern uint8 BEEP_ON_OFF;
extern uint8 out_edge;//出界
void Car_mode_control()//小车简单控制逻辑单元
{
if(control_data[3]<50 && control_data[3]!=0) //左出界
{
out_edge=Left;
}
else if(control_data[3]>110 && control_data[3]!=0) //右出界
{
out_edge=Right;
}
//--------------------车位状态判断-----------------//
if(out_edge==Left && control_data[4]==0 && control_data[5]==0)
{
car_mode=finding_L;
}
else if(out_edge==Right && control_data[4]==0 && control_data[5]==0)
{
car_mode=finding_R;
}
else if (control_data[3]>0 && control_data[4]>0 && control_data[5]>0)
{
car_mode=run;
}
if(control_data[5]<=12 && control_data[5]>=3)
{
LED1=0;
car_mode=stop;
}
else {LED1=1;}
if(Boma4==0)//强制菜单
{
car_mode=stop;
}
//寻找小球的 色号(0为红,1为绿)
if(Boma3==0)
{
BEEP_ON_OFF=OFF;
}
else {BEEP_ON_OFF=ON;}
}
void PWM_updata()//速度控制中心
{
if(car_mode == run)
{
TIM_SetCompare1(TIM1,run_duty.Speed_Duty_R); //右为 TIM1 CH1
TIM_SetCompare4(TIM1,run_duty.Speed_Duty_L); //左为 TIM1 CH4
}
else if(car_mode == finding_R)
{
TIM_SetCompare1(TIM1,1400); //右为 TIM1 CH1
TIM_SetCompare4(TIM1,1400); //左为 TIM1 CH4
}
else if(car_mode == finding_L)
{
TIM_SetCompare1(TIM1,1500); //右为 TIM1 CH1
TIM_SetCompare4(TIM1,1500); //左为 TIM1 CH4
}
else if(car_mode == stop)
{
TIM_SetCompare1(TIM1,0); //右为 TIM1 CH1
TIM_SetCompare4(TIM1,0); //左为 TIM1 CH4
}
}
void PD_control()
{
last_x_error=x_error;
x_error=control_data[3]-80;
ser_duty = C_P*x_error-C_D*(last_x_error-x_error);
run_duty.Speed_Duty_R=1550-ser_duty;//正为正转
run_duty.Speed_Duty_L=1350-ser_duty;
//左边FTM波//限幅
run_duty.Speed_Duty_L=run_duty.Speed_Duty_L<1300?1300:run_duty.Speed_Duty_L;
run_duty.Speed_Duty_L=run_duty.Speed_Duty_L>1600?1600:run_duty.Speed_Duty_L;
//右边FTM波//限幅
run_duty.Speed_Duty_R=run_duty.Speed_Duty_L<1300?1300:run_duty.Speed_Duty_R;
run_duty.Speed_Duty_R=run_duty.Speed_Duty_L>1600?1600:run_duty.Speed_Duty_R;
}
③系统状态设定
typedef struct D //速度结构体
{
int16 Speed_Duty_L;
int16 Speed_Duty_R;
}moty_duty;
typedef enum //枚举小车简单状态
{
finding_R=4,
finding_L=3,
run=2,
stop=1,
error=0,
}
CAR_STATUS_e; //车子状态
typedef enum
{
mode_ON_OFF=0,
car_run=1,
flash=2,
picture=3,
}
MENU_LIST_e; //OLED菜单
3.效果展示
DESIGN
May 31 12:00 June 12:00 Tue 02 12:00 Wed 03 12:00 Thu 04 12:00 部分功能验证 原理图 PCB 程序设计 小车整体搭建 设计制作步骤
1)整体效果图
OLED页面设计
OELD可通过拨码开关切换页面
①在OLED上显示小球的实时坐标【x,y】以及距离 l
② 显示小球在摄像头中的坐标并在屏幕上用“x”表示出来
调试界面
预留五个调试按键
①可调节PD参数
②切换追踪小球颜色阈值
 图1 小车整体效果图 图1 小车整体效果图
|
 图2 小车整体效果图 图2 小车整体效果图
|
附【Download】:
程序+硬件(原理图+PCB):
Github项目地址、设计下载
Dwfish 淹死的鱼 2018.1
