- 基于OpenCv的图片倾斜校正系统详细设计与具体代码实现
AI大模型应用之禅
人工智能数学基础计算科学神经计算深度学习神经网络大数据人工智能大型语言模型AIAGILLMJavaPython架构设计AgentRPA
基于OpenCv的图片倾斜校正系统详细设计与具体代码实现1.背景介绍1.1图像处理的重要性在当今数字时代,图像处理技术在各个领域都扮演着重要角色。无论是在计算机视觉、模式识别、医学影像、遥感探测还是多媒体处理等领域,图像处理都是不可或缺的核心技术。通过对图像进行预处理、增强、分割、特征提取等操作,可以从图像中获取有价值的信息,为后续的分析和决策提供支持。1.2图像倾斜问题及其影响在实际应用中,由于
- 卷积神经网络(Convolutional Neural Network, CNN)
不想秃头的程序
神经网络语音识别人工智能深度学习网络卷积神经网络
卷积神经网络(ConvolutionalNeuralNetwork,CNN)是一种专门用于处理图像、视频等网格数据的深度学习模型。它通过卷积层自动提取数据的特征,并利用空间共享权重和池化层减少参数量和计算复杂度,成为计算机视觉领域的核心技术。以下是CNN的详细介绍:一、核心思想CNN的核心目标是从图像中自动学习层次化特征,并通过空间共享权重和平移不变性减少参数量和计算成本。其关键组件包括:卷积层(
- Python编程:使用Opencv进行图像处理
【参考】https://github.com/opencv/opencv/tree/4.x/samples/pythonPython使用OpenCV进行图像处理OpenCV(OpenSourceComputerVisionLibrary)是一个开源的计算机视觉和机器学习软件库。下面将从基础到高阶介绍如何使用Python中的OpenCV进行图像处理。一、安装首先需要安装OpenCV库:pipinst
- 10个基于Python的计算机视觉实战项目
云博士的AI课堂
基于Python计算机视觉python计算机视觉机器视觉人工智能
10个基于Python的计算机视觉实战项目,涵盖多个领域和应用场景,每个项目均附有GitHub地址、概述、解决的问题及应用场景:1.PCV图像处理与计算机视觉库GitHub地址:jesolem/PCV概述:提供计算机视觉基础算法的Python实现,包括图像分割、直方图均衡化、图像增强等。解决的问题:简化图像处理流程,支持快速实现算法原型。应用场景:学术研究、教学实验、图像预处理任务。2.基于朴素贝
- 使用YOLOv5-ONNX-PyQT-EXE: 全栈式对象检测应用的构建与部署
使用YOLOv5-ONNX-PyQT-EXE:全栈式对象检测应用的构建与部署去发现同类优质开源项目:https://gitcode.com/在计算机视觉领域,实时对象检测是一个至关重要的任务。是一个开源项目,它将流行的YOLOv5对象检测模型集成到ONNX(OpenNeuralNetworkExchange)中,并通过PyQT构建了一个可执行的应用程序,使得非开发人员也能轻松地进行对象检测。项目简
- OpenCV实现相机标定的棋盘格制作与应用
BIG-HO
本文还有配套的精品资源,点击获取简介:在计算机视觉领域,棋盘格标定板用于获取相机参数,实现图像校正和三维重建。OpenCV库提供了绘制棋盘格和相机标定的功能。本文将详细介绍如何使用OpenCV制作棋盘格标定板,包括设计、绘制、保存、相机标定过程和应用。通过实际案例,如畸变矫正、三维重建、AR应用和机器人导航,展示棋盘格标定板在视觉技术中的关键作用。1.棋盘格设计与绘制1.1棋盘格的基本概念与应用棋
- 从0开始学习计算机视觉--Day04--线性分类
Chef_Chen
学习计算机视觉分类
从宏观来看,卷积网络可以看做是由一个个不同的神经网络组件组合而成,就像积木一样通过不同类型的组件搭建形成,其中线性分类器是一个很重要的组件,在很多卷积网络中都有用到,所以了解清楚它的工作原理对我们后续的学习会有很大的帮助。线性分类器是参数模型中最简单,最基础的例子,下面我们用输入图片输出图片分类的模型的例子来更进一步地了解它。首先,我们输入一张图片到模型中,输入后我们就会得到f(x,W),x指的是
- MIAOYUN | 每周AI新鲜事儿(06.14-06.20)
人工智能算法机器学习深度学习
紧跟技术浪潮,洞察行业未来,MIAOYUN《每周AI新鲜事儿》,为您精选全球AI领域的最新动态,涵盖AI技术突破、行业动态、趋势发展、前沿政策与学术研究,带您走在智能时代前沿,一起来回顾本周发生的AI新鲜事儿吧!AI开源大模型腾讯混元3D2.1大模型全链路开源6月14日,在CVPR2025(计算机视觉领域顶会之一)上,腾讯混元3D2.1大模型对外全链路开源,其模型权重及架构、训练代码、数据处理流程
- 【人工智能】微调的秘密武器:释放大模型的无限潜能
蒙娜丽宁
Python杂谈人工智能人工智能
《PythonOpenCV从菜鸟到高手》带你进入图像处理与计算机视觉的大门!解锁Python编程的无限可能:《奇妙的Python》带你漫游代码世界在人工智能迅猛发展的今天,大规模语言模型(LLMs)以其强大的通用能力席卷各行各业。然而,如何让这些通用模型在特定领域或任务中发挥最大潜力?答案是微调(Fine-tuning)。本文深入探讨微调的理论基础、技术细节与实践方法,揭示其作为解锁大模型隐藏潜力
- 【运维】Python与Ansible协同作战:打造自动化服务器配置管理的终极解决方案
蒙娜丽宁
Python杂谈人工智能运维pythonansible
《PythonOpenCV从菜鸟到高手》带你进入图像处理与计算机视觉的大门!解锁Python编程的无限可能:《奇妙的Python》带你漫游代码世界在现代IT运维中,服务器配置管理是一项繁琐但至关重要的任务。手动配置多台服务器不仅耗时,还容易出错。本文深入探讨如何利用Python结合Ansible工具实现自动化服务器配置管理与环境部署。通过Python脚本调用AnsibleAPI,我们可以动态生成配
- 深度学习计算机视觉开源系统OpenMMLab(mmsegmentation、mmdetection、mmpose)环境配置【详细、可运行】
nomoremorphine
深度学习计算机视觉开源
OpenMMLab(mmsegmentation、mmdetection、mmpose)环境配置OpenMMLab简介优势:一、Windows/Linux下环境配置(以mmsegmentationv1.2.2(最新版)为例)0.确认安装版本信息1)确认电脑显卡版本2)确认mmcv对应版本3)确认版本1.安装CUDA和cuDNN2.创建conda环境,下载pytorch3.安装mmcv4.安装MMS
- c语言opencv所用库函数,Py之cv2:cv2库(OpenCV,opencv-python)的简介、安装、使用方法(常见函数、方法等)最强详细攻略...
weixin_39729272
c语言opencv所用库函数
##关于OpenCV简介##OpenCV是一个基于BSD许可(开源)发行的跨平台计算机视觉库,可以运行在Linux、Windows、Android和MacOS操作系统上。它轻量级而且高效——由一系列C函数和少量C++类构成,同时提供了Python、Ruby、MATLAB等语言的接口,实现了图像处理和计算机视觉方面的很多通用算法。OpenCV用C++语言编写,它的主要接口也是C++语言,但是依然保留
- 合规视角下银行智能客服风险防控
AI 智能服务
智能客服人工智能AIGC数据库chatgpt
1.AI驱动金融变革的政策与技术背景政策导向:我国《新一代人工智能发展规划》明确提出发展智能金融,要求:构建金融大数据平台,提升多媒体数据处理能力;创新智能金融产品与服务形态;推广智能客服、监控等技术应用;建立智能风控预警体系。技术支撑:云计算、大数据技术成熟为AI发展奠定了基础。深度学习算法的突破则引爆了本轮AI浪潮,显著提升了复杂任务处理精度,进而推动了计算机视觉、机器学习、自然语言处理(NL
- AI人工智能领域中OpenCV的深度学习融合
AI大模型应用实战
人工智能opencv深度学习ai
AI人工智能领域中OpenCV的深度学习融合关键词:AI人工智能、OpenCV、深度学习融合、计算机视觉、图像识别摘要:本文深入探讨了在AI人工智能领域中OpenCV与深度学习的融合。我们将先介绍OpenCV和深度学习的基本概念,再讲解它们融合的原理和方式,通过实际代码案例展示融合的具体操作,探讨其在不同场景的应用,推荐相关工具和资源,分析未来发展趋势与挑战。希望能让大家对这一融合有全面且深入的了
- 计算机视觉实战:OpenCV 与深度学习结合
QuantumWalker
计算机视觉opencv深度学习python
```html计算机视觉实战:OpenCV与深度学习结合计算机视觉实战:OpenCV与深度学习结合在当今数字化时代,计算机视觉技术已经渗透到我们生活的方方面面。从智能手机的面部识别解锁,到自动驾驶汽车的环境感知,计算机视觉正在改变我们的世界。而在这个领域中,OpenCV和深度学习的结合,更是推动了计算机视觉技术的发展。什么是OpenCV?OpenCV(OpenSourceComputerVisio
- 揭开计算机视觉的神秘面纱:从像素到数字图像
DragonAlchemy
OpenCV历程计算机视觉
揭开计算机视觉的神秘面纱:从像素到数字图像欢迎来到计算机视觉的奇妙世界!在我们深入研究如何使用OpenCV这样的强大工具来让计算机“看懂”图像和视频之前,理解一些最基本的概念至关重要。就像学习任何新语言都需要先掌握字母和单词一样,计算机视觉也有它的“字母表”。今天,我们就来一起探索这些基础构建块:像素、颜色空间以及图像时如何以数字形式表示的。一、像素(Pixel):图像的“原子”想象一下,你正在欣
- 聚焦OpenVINO与OpenCV颜色通道转换的实践指南
颜色通道顺序问题:OpenVINO模型RGB输入与OpenCVBGR格式的转换在计算机视觉任务中,框架间的颜色通道差异常导致模型推理错误。以下方法解决OpenVINO模型需要RGB输入而OpenCV默认输出BGR的问题。理解核心差异OpenCV的imread()函数遵循BGR通道顺序,源于历史摄像头硬件的数据格式。而OpenVINO等深度学习框架多采用RGB顺序,与TensorFlow/PyTor
- 100个AI大模型基础概念(收藏版)
程序员鑫港
人工智能大模型ai开发语言java大语言模型LLM
在人工智能技术快速发展的时代背景下,大模型作为核心驱动力,正深刻改变着各行业的发展模式与应用场景。从自然语言处理到计算机视觉,从智能对话系统到科学研究辅助,大模型展现出强大的通用性和适应性。本文将从基础概念、核心技术、数据处理、训练方法、评估体系、应用场景、伦理安全等多个维度,系统阐述100个AI大模型的关键基础知识,帮助读者全面理解这一前沿技术领域。前排提示,文末有大模型AGI-CSDN独家资料
- 基于 opencv+yolov8+easyocr的车牌追踪识别
(ECUT)Edward-tan
人工智能--CVpython进阶全栈开发opencvyolov8ocrpython
(本项目所有代码打包至我的资源中,大家可在我的文章底部选择下载)目录需求实现效果学习视频大致思路代码实现资源下载需求通过车辆识别技术,识别视频中每个车辆及其车牌号,车辆应进行追踪,避免重复计数量。实现效果车牌识别学习视频使用Python、Yolov8和EasyOCR自动识别车牌计算机视觉教程_哔哩哔哩_bilibili大致思路通过opencv将视频转换为帧,对帧应用车辆识别模型,并使用model.
- 深度学习应用于情感识别:利用YOLOv8进行AffectNet情感分类
YOLO实战营
深度学习YOLO分类人工智能目标检测目标跟踪数据挖掘
引言情感识别(EmotionRecognition)是计算机视觉和自然语言处理中的一个重要研究方向,广泛应用于人机交互、智能客服、心理健康监测、视频分析等领域。随着深度学习技术的发展,情感识别取得了显著进展,特别是在面部表情识别方面。面部表情作为人类情感的自然表现之一,能在很大程度上反映个体的情感状态。AffectNet数据集是一个广泛使用的情感识别数据集,它包含了大量带有标注情感标签的面部表情图
- 无需开颅!瘫痪患者也能控制数字设备、分割一切模型开源、最强开源文生图模型问世 | AI视界周刊第 3 期
战场小包
AI视界周刊人工智能业界资讯agi
AI视界周刊由战场小包维护,每周一更新,包含热点聚焦、应用破局、学术前沿、社区热议、智见交锋、跨界AI、企业动态和争议AI八大板块,后续板块划分和内容撰写在周刊迭代过程中持续优化,欢迎大家提出建议。欢迎大家来到《AI视界周刊第3期》(07/29~08/04)。✨热点聚焦Meta「SegmentAnything」2.0开源,视频分割能力惊艳Meta公司开源了其最新计算机视觉模型SegmentAnyt
- cnn 一维时序数据_AI顶会解读|时序动作分割与检测,附代码链接
时序动作分割与检测时序动作的分割与检测是视频计算机视觉技术的一大常规任务,对自动驾驶和机器人等应用至关重要,下面3篇论文是腾讯AILab在这一方向的探索成果。1.动作识别中的时序帧间差异表征学习TemporalDistinctRepresentationLearningforActionRecognition本文由腾讯AILab、腾讯优图实验室、新加坡南洋理工大学、美国纽约州立大学布法罗分校合作完
- Python 里 PyTorch 的生成对抗网络架构
Python编程之道
pythonpytorch生成对抗网络ai
Python里PyTorch的生成对抗网络架构关键词:PyTorch、生成对抗网络(GAN)、深度学习、神经网络、计算机视觉、对抗训练、生成模型摘要:本文深入探讨了在PyTorch框架下实现生成对抗网络(GAN)的完整架构。我们将从GAN的基本原理出发,详细讲解其核心组件、数学基础,并通过PyTorch代码实现一个完整的GAN模型。文章涵盖了从理论到实践的各个方面,包括模型设计、训练技巧、常见问题
- 一[3.0]、 yolov8 工作原理
他人是一面镜子,保持谦虚的态度
车道检测研究YOLO
目录YOLOv8简介什么是YOLOv8?yaml配置文件解析YOLOv8架构图Yolov8有什么新功能?YOLO模型彻底改变了计算机视觉领域。识别物体是计算机视觉中的一项关键任务,可应用于机器人、医学成像、监控系统和自动驾驶汽车等多个领域。YOLO模型的最新版本YOLOv8是一种先进的实时物体检测框架,引起了研究界的关注。在所有流行的物体识别机器学习模型(如FasterR-CNN、SSD和Reti
- Python与MediaPipe实现实时手势数字识别项目源码
盛艺小豆丁
本文还有配套的精品资源,点击获取简介:本项目基于Python语言,利用MediaPipe框架实现手势数字识别。MediaPipe提供多种计算机视觉解决方案,项目中重点应用手部追踪功能。通过收集手势数据、提取特征、选择模型、训练及优化,实现从视频流中实时识别手势并将其转换为数字的功能。项目包含数据收集、机器学习模型训练、实时应用等关键步骤,以及readme、HandTrackingModule、ma
- EasyVision
忒可君上位机软件开发
计算机视觉图像处理人工智能
EasyVision是一个计算机视觉库,用于图像处理和计算机视觉任务。以下是EasyVision的操作手册,包括安装、基本功能和常用功能的使用方法。1.安装EasyVisiona.下载EasyVision库文件并解压缩。b.将EasyVision库文件添加到您的项目中。2.创建EasyVision对象a.导入EasyVision库。b.创建一个EasyVision对象:`EasyVisioneas
- AI人工智能目标检测在体育赛事中的应用
AI大模型应用之禅
人工智能目标检测计算机视觉ai
AI人工智能目标检测在体育赛事中的应用关键词:目标检测、计算机视觉、深度学习、体育分析、YOLO、运动员追踪、比赛统计摘要:本文深入探讨了AI目标检测技术在体育赛事中的创新应用。我们将从计算机视觉基础出发,详细分析目标检测的核心算法原理,特别是YOLO系列模型在运动员和球类追踪中的实现方式。文章包含完整的数学模型解释、Python实战项目演示,以及在实际体育场景中的应用案例分析。最后,我们展望了这
- 图像处理技术研究与实现——python+opencv
AnronSakura
图像处理pythonopencv
背景介绍21世纪是一个充满信息的时代,图像作为人类感知世界的视觉基础,是人类获取信息、表达信息和传递信息的重要手段。处理图像,可以帮助我们更好地获取信息,也可以使我们更客观、准确地认识世界。图像处理作为计算机视觉领域的重要分支,在各个行业中扮演着越来越重要的角色。从医疗诊断、自动驾驶、安防监控到人工智能领域的图像识别,图像处理无处不在。OpenCVOpenCV是一个开源的计算机视觉库,它包含了丰富
- 从0开始学习计算机视觉--Day03--K近邻算法
Chef_Chen
学习近邻算法算法
上次我们提到了用L1距离去区分不同的图片,实际上它的原理也能用来区分不同的数据。但有个坏处是他只是取最近的拥有一样距离的点作为同一类,假如有一个点跟周围的点的距离都是不一样的,分类器很可能会把他当成独立的一类,如下图所示:图中的点代表数据,背景颜色代表其被分类器给予的标签,可以看到数据点被很好的分类了,除了绿色数据中的一个黄色点,分类器将其判断为了与绿色不同的黄色,但实际上,这个点看起来很可能是因
- OpenCV计算机视觉实战(12)——图像金字塔与特征缩放
AI technophile
OpenCV项目实践指南计算机视觉opencv人工智能
OpenCV计算机视觉实战(12)——图像金字塔与特征缩放0.前言1.高斯金字塔1.1应用场景1.2实现过程2.拉普拉斯金字塔2.1应用场景2.2实现过程3.图像融合实例3.1应用场景3.2实现过程小结系列链接0.前言图像金字塔技术通过对原始图像按不同分辨率进行多层次表示,不仅能提升计算效率,还能为图像融合、检测与识别提供多尺度特征。高斯金字塔(GaussianPyramid)用于构建多级低通图像
- Java 并发包之线程池和原子计数
lijingyao8206
Java计数ThreadPool并发包java线程池
对于大数据量关联的业务处理逻辑,比较直接的想法就是用JDK提供的并发包去解决多线程情况下的业务数据处理。线程池可以提供很好的管理线程的方式,并且可以提高线程利用率,并发包中的原子计数在多线程的情况下可以让我们避免去写一些同步代码。
这里就先把jdk并发包中的线程池处理器ThreadPoolExecutor 以原子计数类AomicInteger 和倒数计时锁C
- java编程思想 抽象类和接口
百合不是茶
java抽象类接口
接口c++对接口和内部类只有简介的支持,但在java中有队这些类的直接支持
1 ,抽象类 : 如果一个类包含一个或多个抽象方法,该类必须限定为抽象类(否者编译器报错)
抽象方法 : 在方法中仅有声明而没有方法体
package com.wj.Interface;
- [房地产与大数据]房地产数据挖掘系统
comsci
数据挖掘
随着一个关键核心技术的突破,我们已经是独立自主的开发某些先进模块,但是要完全实现,还需要一定的时间...
所以,除了代码工作以外,我们还需要关心一下非技术领域的事件..比如说房地产
&nb
- 数组队列总结
沐刃青蛟
数组队列
数组队列是一种大小可以改变,类型没有定死的类似数组的工具。不过与数组相比,它更具有灵活性。因为它不但不用担心越界问题,而且因为泛型(类似c++中模板的东西)的存在而支持各种类型。
以下是数组队列的功能实现代码:
import List.Student;
public class
- Oracle存储过程无法编译的解决方法
IT独行者
oracle存储过程
今天同事修改Oracle存储过程又导致2个过程无法被编译,流程规范上的东西,Dave 这里不多说,看看怎么解决问题。
1. 查看无效对象
XEZF@xezf(qs-xezf-db1)> select object_name,object_type,status from all_objects where status='IN
- 重装系统之后oracle恢复
文强chu
oracle
前几天正在使用电脑,没有暂停oracle的各种服务。
突然win8.1系统奔溃,无法修复,开机时系统 提示正在搜集错误信息,然后再开机,再提示的无限循环中。
无耐我拿出系统u盘 准备重装系统,没想到竟然无法从u盘引导成功。
晚上到外面早了一家修电脑店,让人家给装了个系统,并且那哥们在我没反应过来的时候,
直接把我的c盘给格式化了 并且清理了注册表,再装系统。
然后的结果就是我的oracl
- python学习二( 一些基础语法)
小桔子
pthon基础语法
紧接着把!昨天没看继续看django 官方教程,学了下python的基本语法 与c类语言还是有些小差别:
1.ptyhon的源文件以UTF-8编码格式
2.
/ 除 结果浮点型
// 除 结果整形
% 除 取余数
* 乘
** 乘方 eg 5**2 结果是5的2次方25
_&
- svn 常用命令
aichenglong
SVN版本回退
1 svn回退版本
1)在window中选择log,根据想要回退的内容,选择revert this version或revert chanages from this version
两者的区别:
revert this version:表示回退到当前版本(该版本后的版本全部作废)
revert chanages from this versio
- 某小公司面试归来
alafqq
面试
先填单子,还要写笔试题,我以时间为急,拒绝了它。。时间宝贵。
老拿这些对付毕业生的东东来吓唬我。。
面试官很刁难,问了几个问题,记录下;
1,包的范围。。。public,private,protect. --悲剧了
2,hashcode方法和equals方法的区别。谁覆盖谁.结果,他说我说反了。
3,最恶心的一道题,抽象类继承抽象类吗?(察,一般它都是被继承的啊)
4,stru
- 动态数组的存储速度比较 集合框架
百合不是茶
集合框架
集合框架:
自定义数据结构(增删改查等)
package 数组;
/**
* 创建动态数组
* @author 百合
*
*/
public class ArrayDemo{
//定义一个数组来存放数据
String[] src = new String[0];
/**
* 增加元素加入容器
* @param s要加入容器
- 用JS实现一个JS对象,对象里有两个属性一个方法
bijian1013
js对象
<html>
<head>
</head>
<body>
用js代码实现一个js对象,对象里有两个属性,一个方法
</body>
<script>
var obj={a:'1234567',b:'bbbbbbbbbb',c:function(x){
- 探索JUnit4扩展:使用Rule
bijian1013
java单元测试JUnitRule
在上一篇文章中,讨论了使用Runner扩展JUnit4的方式,即直接修改Test Runner的实现(BlockJUnit4ClassRunner)。但这种方法显然不便于灵活地添加或删除扩展功能。下面将使用JUnit4.7才开始引入的扩展方式——Rule来实现相同的扩展功能。
1. Rule
&n
- [Gson一]非泛型POJO对象的反序列化
bit1129
POJO
当要将JSON数据串反序列化自身为非泛型的POJO时,使用Gson.fromJson(String, Class)方法。自身为非泛型的POJO的包括两种:
1. POJO对象不包含任何泛型的字段
2. POJO对象包含泛型字段,例如泛型集合或者泛型类
Data类 a.不是泛型类, b.Data中的集合List和Map都是泛型的 c.Data中不包含其它的POJO
- 【Kakfa五】Kafka Producer和Consumer基本使用
bit1129
kafka
0.Kafka服务器的配置
一个Broker,
一个Topic
Topic中只有一个Partition() 1. Producer:
package kafka.examples.producers;
import kafka.producer.KeyedMessage;
import kafka.javaapi.producer.Producer;
impor
- lsyncd实时同步搭建指南——取代rsync+inotify
ronin47
1. 几大实时同步工具比较 1.1 inotify + rsync
最近一直在寻求生产服务服务器上的同步替代方案,原先使用的是 inotify + rsync,但随着文件数量的增大到100W+,目录下的文件列表就达20M,在网络状况不佳或者限速的情况下,变更的文件可能10来个才几M,却因此要发送的文件列表就达20M,严重减低的带宽的使用效率以及同步效率;更为要紧的是,加入inotify
- java-9. 判断整数序列是不是二元查找树的后序遍历结果
bylijinnan
java
public class IsBinTreePostTraverse{
static boolean isBSTPostOrder(int[] a){
if(a==null){
return false;
}
/*1.只有一个结点时,肯定是查找树
*2.只有两个结点时,肯定是查找树。例如{5,6}对应的BST是 6 {6,5}对应的BST是
- MySQL的sum函数返回的类型
bylijinnan
javaspringsqlmysqljdbc
今天项目切换数据库时,出错
访问数据库的代码大概是这样:
String sql = "select sum(number) as sumNumberOfOneDay from tableName";
List<Map> rows = getJdbcTemplate().queryForList(sql);
for (Map row : rows
- java设计模式之单例模式
chicony
java设计模式
在阎宏博士的《JAVA与模式》一书中开头是这样描述单例模式的:
作为对象的创建模式,单例模式确保某一个类只有一个实例,而且自行实例化并向整个系统提供这个实例。这个类称为单例类。 单例模式的结构
单例模式的特点:
单例类只能有一个实例。
单例类必须自己创建自己的唯一实例。
单例类必须给所有其他对象提供这一实例。
饿汉式单例类
publ
- javascript取当月最后一天
ctrain
JavaScript
<!--javascript取当月最后一天-->
<script language=javascript>
var current = new Date();
var year = current.getYear();
var month = current.getMonth();
showMonthLastDay(year, mont
- linux tune2fs命令详解
daizj
linuxtune2fs查看系统文件块信息
一.简介:
tune2fs是调整和查看ext2/ext3文件系统的文件系统参数,Windows下面如果出现意外断电死机情况,下次开机一般都会出现系统自检。Linux系统下面也有文件系统自检,而且是可以通过tune2fs命令,自行定义自检周期及方式。
二.用法:
Usage: tune2fs [-c max_mounts_count] [-e errors_behavior] [-g grou
- 做有中国特色的程序员
dcj3sjt126com
程序员
从出版业说起 网络作品排到靠前的,都不会太难看,一般人不爱看某部作品也是因为不喜欢这个类型,而此人也不会全不喜欢这些网络作品。究其原因,是因为网络作品都是让人先白看的,看的好了才出了头。而纸质作品就不一定了,排行榜靠前的,有好作品,也有垃圾。 许多大牛都是写了博客,后来出了书。这些书也都不次,可能有人让为不好,是因为技术书不像小说,小说在读故事,技术书是在学知识或温习知识,有
- Android:TextView属性大全
dcj3sjt126com
textview
android:autoLink 设置是否当文本为URL链接/email/电话号码/map时,文本显示为可点击的链接。可选值(none/web/email/phone/map/all) android:autoText 如果设置,将自动执行输入值的拼写纠正。此处无效果,在显示输入法并输
- tomcat虚拟目录安装及其配置
eksliang
tomcat配置说明tomca部署web应用tomcat虚拟目录安装
转载请出自出处:http://eksliang.iteye.com/blog/2097184
1.-------------------------------------------tomcat 目录结构
config:存放tomcat的配置文件
temp :存放tomcat跑起来后存放临时文件用的
work : 当第一次访问应用中的jsp
- 浅谈:APP有哪些常被黑客利用的安全漏洞
gg163
APP
首先,说到APP的安全漏洞,身为程序猿的大家应该不陌生;如果抛开安卓自身开源的问题的话,其主要产生的原因就是开发过程中疏忽或者代码不严谨引起的。但这些责任也不能怪在程序猿头上,有时会因为BOSS时间催得紧等很多可观原因。由国内移动应用安全检测团队爱内测(ineice.com)的CTO给我们浅谈关于Android 系统的开源设计以及生态环境。
1. 应用反编译漏洞:APK 包非常容易被反编译成可读
- C#根据网址生成静态页面
hvt
Web.netC#asp.nethovertree
HoverTree开源项目中HoverTreeWeb.HVTPanel的Index.aspx文件是后台管理的首页。包含生成留言板首页,以及显示用户名,退出等功能。根据网址生成页面的方法:
bool CreateHtmlFile(string url, string path)
{
//http://keleyi.com/a/bjae/3d10wfax.htm
stri
- SVG 教程 (一)
天梯梦
svg
SVG 简介
SVG 是使用 XML 来描述二维图形和绘图程序的语言。 学习之前应具备的基础知识:
继续学习之前,你应该对以下内容有基本的了解:
HTML
XML 基础
如果希望首先学习这些内容,请在本站的首页选择相应的教程。 什么是SVG?
SVG 指可伸缩矢量图形 (Scalable Vector Graphics)
SVG 用来定义用于网络的基于矢量
- 一个简单的java栈
luyulong
java数据结构栈
public class MyStack {
private long[] arr;
private int top;
public MyStack() {
arr = new long[10];
top = -1;
}
public MyStack(int maxsize) {
arr = new long[maxsize];
top
- 基础数据结构和算法八:Binary search
sunwinner
AlgorithmBinary search
Binary search needs an ordered array so that it can use array indexing to dramatically reduce the number of compares required for each search, using the classic and venerable binary search algori
- 12个C语言面试题,涉及指针、进程、运算、结构体、函数、内存,看看你能做出几个!
刘星宇
c面试
12个C语言面试题,涉及指针、进程、运算、结构体、函数、内存,看看你能做出几个!
1.gets()函数
问:请找出下面代码里的问题:
#include<stdio.h>
int main(void)
{
char buff[10];
memset(buff,0,sizeof(buff));
- ITeye 7月技术图书有奖试读获奖名单公布
ITeye管理员
活动ITeye试读
ITeye携手人民邮电出版社图灵教育共同举办的7月技术图书有奖试读活动已圆满结束,非常感谢广大用户对本次活动的关注与参与。
7月试读活动回顾:
http://webmaster.iteye.com/blog/2092746
本次技术图书试读活动的优秀奖获奖名单及相应作品如下(优秀文章有很多,但名额有限,没获奖并不代表不优秀):
《Java性能优化权威指南》
 ,能量函数E (H, x;θ)是从姿态H和观测图像x到实数的映射,由矢量θ参数化。
,能量函数E (H, x;θ)是从姿态H和观测图像x到实数的映射,由矢量θ参数化。

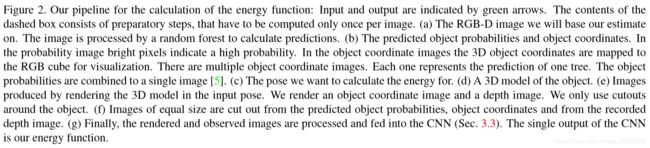
 ,其中 xi表示第i个训练图像的观测值,H *i表示相应的真实姿态。
,其中 xi表示第i个训练图像的观测值,H *i表示相应的真实姿态。
 。由于式(1)中的分母对于任意给定的观测x都是常数,所以找到MAP估计值就等于最小化我们的能量函数。为此,我们利用了[5]的优化方案,但用我们的能量函数
。由于式(1)中的分母对于任意给定的观测x都是常数,所以找到MAP估计值就等于最小化我们的能量函数。为此,我们利用了[5]的优化方案,但用我们的能量函数 代替了它们的能量函数。
代替了它们的能量函数。