OpenCV-图像处理(29、凸包-Convex Hull)
概念介绍
什么是凸包(Convex Hull),在一个多变形边缘或者内部任意两个点的连线都包含在多边形边界或者内部。
正式定义:包含点集合S中所有点的最小凸多边形称为凸包。凸包可以想象为一条刚好包着所有点的橡皮圈,用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边形,它能包含点集中所有的点。


常见的检测算法
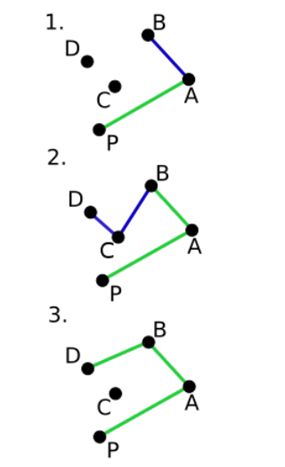
- Graham扫描法(也可以参考博客:https://blog.csdn.net/keith_bb/article/details/70194073)
- 首先选择Y方向最低的点作为起始点p0
- 从p0开始极坐标扫描,依次添加p1….pn(排序顺序是根据极坐标的角度大小,逆时针方向)
- 对每个点pi来说,如果添加pi点到凸包中导致一个左转向(逆时针方法)则添加该点到凸包, 反之如果导致一个右转向(顺时针方向)删除该点从凸包中
- Jarvis步进法
其算法流程如下:
1.照横坐标最小的点(如有一样则取相同点纵坐标更小的点)
2.从这点开始卷包裹,照最靠近外侧的点(通过叉积比较)
3.遍历所有点,直到重新找到起点,退出。
API说明cv::convexHull
convexHull(
InputArray points,// 输入候选点,来自findContours
OutputArray hull,// 凸包
bool clockwise,// default true。操作方向,当标识符为真时,输出凸包为顺时针方向,否则为逆时针方向。
bool returnPoints)//操作标识符,默认值为true,此时返回各凸包的各个点,否则返回凸包各点的指数,当输出数组时std::vector时,此标识被忽略。
)
步骤
- 首先把图像从RGB转为灰度
- 然后再转为二值图像
- 在通过发现轮廓得到候选点
- 凸包API调用
- 绘制显示。
程序代码
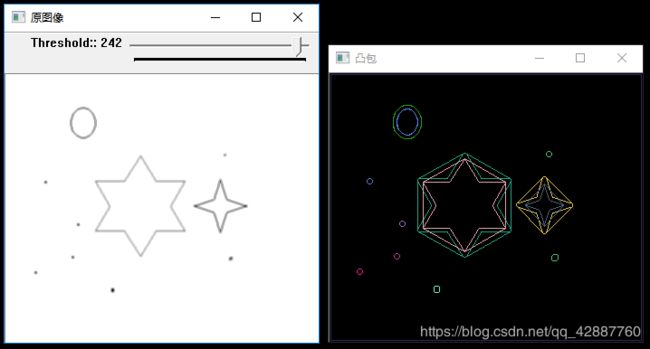
#include 运行结果
参考博客
- https://blog.csdn.net/keith_bb/article/details/70194073