使用openMV3与stm32进行通讯
使用openMV3与stm32进行通讯
想用openMV与stm32通讯,在网上找了一大圈,最后决定使用串口
可以找到openMV的引脚资源图如下:
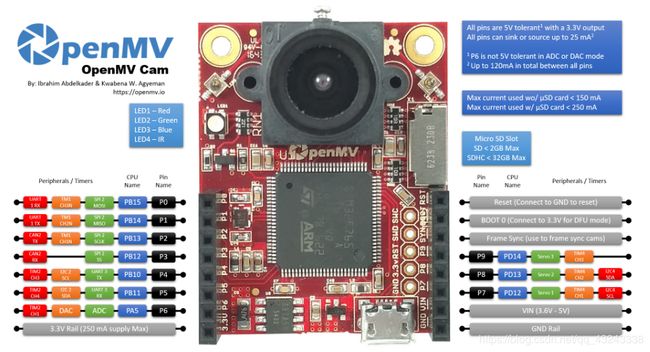
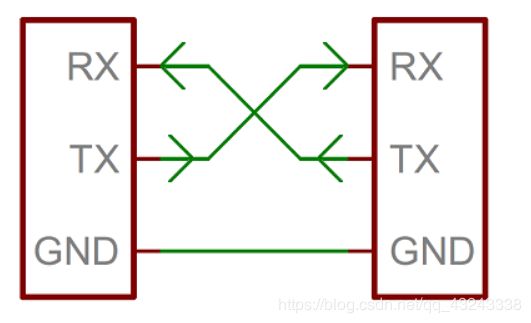
这里使用P4(USART3_TX)与P5(USART3_RX)脚与stm32的USART1交叉联接。
openMV的代码如下,功能是进行色块识别并把中心点传给stm32,需要注意的是对数据的打包格式,用到了ustruct.pack这个函数:
import sensor, image, time, math
from pyb import UART
import json
import ustruct
#white_threshold_01 = ((95, 100, -18, 3, -8, 4)); #白色阈值
red_threshold_01 = ((35, 100, 41, 77, 24, 59));
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 2000)
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
clock = time.clock()
uart = UART(3,115200) #定义串口3变量
uart.init(115200, bits=8, parity=None, stop=1) # init with given parameters
def find_max(blobs): #定义寻找色块面积最大的函数
max_size=0
for blob in blobs:
if blob.pixels() > max_size:
max_blob=blob
max_size = blob.pixels()
return max_blob
def sending_data(cx,cy):
global uart;
#frame=[0x2C,18,cx%0xff,int(cx/0xff),cy%0xff,int(cy/0xff),0x5B];
#data = bytearray(frame)
data = ustruct.pack(", #格式为俩个字符俩个短整型(2字节)
0x2C, #帧头1
0x12, #帧头2
int(cx), # up sample by 4 #数据1
int(cy), # up sample by 4 #数据2
0x5B)
uart.write(data); #必须要传入一个字节数组
def recive_data():
global uart
if uart.any():
tmp_data = uart.readline();
print(tmp_data)
#mainloop
while(True):
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot() # Take a picture and return the image.
# pixels_threshold=100, area_threshold=100
blobs = img.find_blobs([red_threshold_01], area_threshold=150);
cx=0;cy=0;
if blobs:
#如果找到了目标颜色
max_b = find_max(blobs);
# Draw a rect around the blob.
img.draw_rectangle(max_b[0:4]) # rect
#用矩形标记出目标颜色区域
img.draw_cross(max_b[5], max_b[6]) # cx, cy
img.draw_cross(160, 120) # 在中心点画标记
#在目标颜色区域的中心画十字形标记
cx=max_b[5];
cy=max_b[6];
img.draw_line((160,120,cx,cy), color=(127));
#img.draw_string(160,120, "(%d, %d)"%(160,120), color=(127));
img.draw_string(cx, cy, "(%d, %d)"%(cx,cy), color=(127));
sending_data(cx,cy); #发送点位坐标
recive_data();
#time.sleep(1000)
#pack各字母对应类型
#x pad byte no value 1
#c char string of length 1 1
#b signed char integer 1
#B unsigned char integer 1
#? _Bool bool 1
#h short integer 2
#H unsigned short integer 2
#i int integer 4
#I unsigned int integer or long 4
#l long integer 4
#L unsigned long long 4
#q long long long 8
#Q unsilong long long 8
#f float float 4
#d double float 8
#s char[] string 1
#p char[] string 1
#P void * long
stm32端接收到一帧数据并解包,这里部分参考了这篇文章。实际用的是stm32f103,但移植到f4上也很简单,代码总共分三块,初始化,中断,主函数:
//串口初始化
void USART1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //串口端口配置结构体变量
USART_InitTypeDef USART_InitStructure;//串口参数配置结构体变量
NVIC_InitTypeDef NVIC_InitStructure;//串口中断配置结构体变量
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); //打开串口复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //打开PC端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PC.10
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//设定IO口的输出速度为50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOC.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PC.11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOC.10
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0 ;//抢占优先级2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = 115200;//串口波特率为115200
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式使能
USART_Init(USART1, &USART_InitStructure); //初始化串口4
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口4
USART_ClearFlag(USART1, USART_FLAG_TC); //清串口4发送标志
}
//串口1中断处理函数
void USART1_IRQHandler(void) //串口4全局中断服务函数
{
u8 temp;
if( USART_GetITStatus(USART1,USART_IT_RXNE)!=RESET )
{
USART_ClearITPendingBit(USART1,USART_IT_RXNE);//清除中断标志
temp = USART_ReceiveData(USART1);
Openmv_Receive_Data(temp);//openmv数据处理函数
}
}
void Openmv_Receive_Data(int16_t data)//接收Openmv传过来的数据
{
static u8 state = 0;
if(state==0&&data==0x2C)
{
state=1;
RxBuffer1[RxCounter1++]=data;
}
else if(state==1&&data==18)
{
state=2;
RxBuffer1[RxCounter1++]=data;
}
else if(state==2)
{
RxBuffer1[RxCounter1++]=data;
if(RxCounter1>19||data == 0x5B) state=3; //the last of char is openmv[19]
}
else if(state==3) //state == 3 检测是否接受到结束标志
{
if(RxBuffer1[RxCounter1-1] == 0x5B)
{
state = 0;
RxFlag1 = 1;
USART_ITConfig(USART1,USART_IT_RXNE,DISABLE);
}
else //wrong thing
{
state = 0;
RxCounter1=0;
}
}
else //wrong thing
{
state = 0;
RxCounter1=0;
}
}
//主循环处理函数
void USART1_Rx_Task(void)
{
u16 posX,posY;
if(RxFlag1 == 1)
{
// for(i=0;i
// {
// Buf[i] = openmv[i+2];
// }
posX = RxBuffer1[3]<<8 | RxBuffer1[2];
posY = RxBuffer1[5]<<8 | RxBuffer1[4];
sprintf((char*)Buf," X=%03d Y=%03d ",posX,posY);
LCD_DisplayStringLine(Line4 ,Buf);
// usart_send((char *)Buf,USART1);
RxFlag1 = 0;
RxCounter1 = 0;
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
}
}
时间不早了,下次再上实物图吧。
完整工程打包在这里