【信号与系统】笔记(1)绪论
Author:AXYZdong
自动化专业 工科男
有一点思考,有一点想法,有一点理性!
文章目录
- 一、信号
- 1、概念
- 2、分类
- 3、周期信号和非周期信号
- 3.1、基本概念
- 3.2、周期 T T T求法
- 二、系统
- 1、概念
- 2、分类
- 3、线性系统
- 3.1概念
- 3.2线性系统的判断方法
- 4、时不变系统
- 4.1概念
- 4.2判断方法
- 5、线性时不变系统(Linear and Time-invariant System)
- 三、常用的基本信号
- 1、单位阶跃信号(unit step signal)
- 2、矩形脉冲信号(门函数)
- 3、斜坡信号(ramp signal)
- 4、取样函数(sampling function)
- 5、单位冲激函数(unit impulse function)
一、信号
1、概念
信号:物质的运动形式或状态的变化。
表示:信号常用时间函数(或序列)表示。该函数的图像称为信号的波形。
2、分类
| 分类标准 | 信号类别 |
|---|---|
| 以自变量取值分类 | 连续信号、离散信号 |
| 以信号的起始时刻分类 | 因果信号、非因果信号 |
| 以 f ( t ) f(t) f(t)取值分类 | 周期信号、非周期信号 |
| 以确立与随机分类 | 确定信号、随机信号 |
| 以 f ( t ) f(t) f(t)为实函数或复函数分类 | 实信号、复信号 |
| 以能量是否有限分类 | 能量有限信号、能量无限信号 |
3、周期信号和非周期信号
3.1、基本概念
周期信号(period signal)是定义在 (- ∞ \infty ∞,+ ∞ \infty ∞)区间,每隔一定时间 T T T(或整数 N N N),按相同规律重复变化的信号。
连续周期信号 f ( t ) f(t) f(t)满足:
f ( t ) = f ( t + m T ) , m = 0 , ± 1 , ± 2 , . . . f(t)=f(t+mT),m=0,\pm1,\pm2,... f(t)=f(t+mT),m=0,±1,±2,...
离散周期信号 f ( k ) f(k) f(k)满足:
f ( k ) = f ( k + m N ) , m = 0 , ± 1 , ± 2 , . . . f(k)=f(k+mN),m=0,\pm1,\pm2,... f(k)=f(k+mN),m=0,±1,±2,...
满足上述关系的最小 T T T(或整数 N N N)称为该信号的周期。不具有周期性的信号称为非周期信号。
3.2、周期 T T T求法
举两个例子,通过例子来说明具体求法。
(1) f 1 ( t ) = sin 2 t + cos 3 t f_1(t)=\sin2t + \cos3t f1(t)=sin2t+cos3t (2) f 2 ( t ) = cos 2 t + sin π t f_2(t)=\cos2t + \sin \pi t f2(t)=cos2t+sinπt
解: 两个周期信号 x ( t ) , y ( t ) x(t),y(t) x(t),y(t)的周期分别为 T 1 , T 2 T_1,T_2 T1,T2,若其周期之比 T 1 T 2 \frac{T_1}{T_2} T2T1为有理数,则其和信号 x ( t ) + y ( t ) x(t)+y(t) x(t)+y(t)仍然是周期信号,其周期为 T 1 T_1 T1和 T 2 T_2 T2的最小公倍数。
(1) sin 2 t , T 1 = 2 π 2 = π \sin2t,T_1=\frac{2\pi}{2}=\pi sin2t,T1=22π=π
cos 3 t , T 2 = 2 π 3 \cos3t,T_2=\frac{2\pi}{3} cos3t,T2=32π
T 1 T 2 = 3 2 \frac{T_1}{T_2}=\frac{3}{ 2} T2T1=23为有理数, f 1 ( t ) f_1(t) f1(t)为周期信号,周期 2 π 2\pi 2π
(2) cos 2 t , T 1 = 2 π 2 = π \cos2t,T_1=\frac{2\pi}{2}=\pi cos2t,T1=22π=π
sin π t , T 2 = 2 π π = 2 \sin \pi t,T_2=\frac{2\pi}{\pi}=2 sinπt,T2=π2π=2
T 1 T 2 = π 2 \frac{T_1}{T_2}=\frac{\pi}{ 2} T2T1=2π为无理数, f 2 ( t ) f_2(t) f2(t)为非周期信号
总结:①连续的正弦信号一定是周期信号
②正弦序列不一定是周期序列
③ 两连续周期信号之和不一定是周期信号
④两周期序列之和一定是周期序列
二、系统
1、概念
系统(system):由若干个相互联系、相互作用的单元组成的具有一定功能的整体。
例:收音机系统
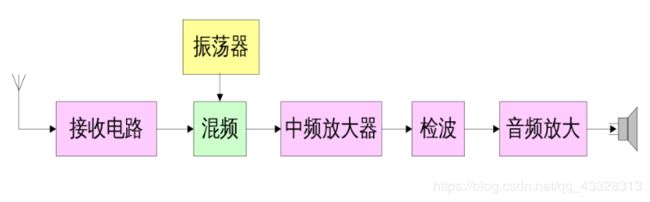
表示:图示、方程(微分方程、差分方程)。
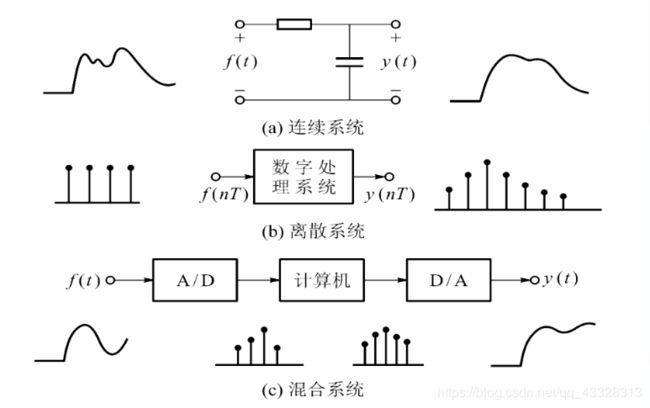
2、分类
按系统处理信号的形式分类
3、线性系统
3.1概念
线性(linearity property):均匀性、叠加性。
线性系统:指具有线性特性的系统
系统的线性特性:
f 1 ( t ) → \underrightarrow{f_1(t)} f1(t) H H H y 1 ( t ) → \underrightarrow{y_1(t)} y1(t)
f 2 ( t ) → \underrightarrow{f_2(t)} f2(t) H H H y 2 ( t ) → \underrightarrow{y_2(t)} y2(t)
α 1 f 1 ( t ) + α 2 f 2 ( t ) → \underrightarrow{\alpha _1f_1(t)+\alpha _2f_2(t)} α1f1(t)+α2f2(t) H H H α 1 y 1 ( t ) + α 2 y 2 ( t ) → \underrightarrow{\alpha _1y_1(t)+\alpha _2y_2(t)} α1y1(t)+α2y2(t)
3.2线性系统的判断方法
先线性运算,再经系统 = 先经系统,再线性运算
f 1 ( t ) → C 1 C 1 f 1 ( t ) → f 2 ( t ) → C 2 C 2 f 2 ( t ) → } → C 1 f 1 ( t ) + C 2 f 2 ( t ) → H → H { C 1 f 1 ( t ) + C 2 f 2 ( t ) } \left. \begin{array}{l} \text{$\underrightarrow{f_1(t)}$ $C_1$ $\underrightarrow{C_1f_1(t)}$}\\ \text{$\underrightarrow{f_2(t)}$ $C_2$ $\underrightarrow{C_2f_2(t)}$} \end{array} \right\} \to C_1f_1(t)+C_2f_2(t) \to H \to H \lbrace C_1f_1(t)+C_2f_2(t) \rbrace f1(t) C1 C1f1(t)f2(t) C2 C2f2(t)}→C1f1(t)+C2f2(t)→H→H{C1f1(t)+C2f2(t)}
f 1 ( t ) → H H { f 1 ( t ) } → f 2 ( t ) → H H { f 2 ( t ) } → } → H { f 1 ( t ) } + H { f 2 ( t ) } → C → C 1 H { f 1 ( t ) } + C 2 H { f 2 ( t ) } \left. \begin{array}{l} \text{$\underrightarrow{f_1(t)}$ $H$ $\underrightarrow{ H \lbrace f_1(t) \rbrace }$}\\ \text{$\underrightarrow{f_2(t)}$ $H$ $\underrightarrow{ H \lbrace f_2(t) \rbrace}$} \end{array} \right\} \to H \lbrace f_1(t) \rbrace+H \lbrace f_2(t) \rbrace \to C \to C_1H \lbrace f_1(t) \rbrace + C_2H \lbrace f_2(t) \rbrace f1(t) H H{f1(t)}f2(t) H H{f2(t)}}→H{f1(t)}+H{f2(t)}→C→C1H{f1(t)}+C2H{f2(t)}
若 H { C 1 f 1 ( t ) + C 2 f 2 ( t ) } = C 1 H { f 1 ( t ) } + C 2 H { f 2 ( t ) } H \lbrace C_1f_1(t)+C_2f_2(t) \rbrace = C_1H \lbrace f_1(t) \rbrace + C_2H \lbrace f_2(t) \rbrace H{C1f1(t)+C2f2(t)}=C1H{f1(t)}+C2H{f2(t)}
则系统 H H H为线性系统
例:判断方程所描述的系统的线性
y ( k ) + ( k − 1 ) y ( k − 1 ) = f ( k ) y(k)+(k-1)y(k-1)=f(k) y(k)+(k−1)y(k−1)=f(k)
解:
f 1 ( k ) → y 1 ( k ) , f 2 ( k ) → y 2 ( k ) f 1 ( k ) + f 2 ( k ) = y 1 ( k ) + y 2 ( k ) + ( k − 1 ) { y 1 ( k − 1 ) + y 2 ( k − 1 ) } f 1 ( k ) + f 2 ( k ) → y 1 ( k ) + y 2 ( k ) f 1 ( k ) + f 2 ( k ) = y 1 ( k ) + y 2 ( k ) + ( k − 1 ) { y 1 ( k − 1 ) + y 2 ( k − 1 ) } f_1(k) \to y_1(k) ,f_2(k) \to y_2(k)\\ f_1(k)+f_2(k)=y_1(k)+y_2(k)+(k-1) \lbrace y_1(k-1)+y_2(k-1) \rbrace\\ f_1(k)+f_2(k) \to y_1(k) + y_2(k)\\ f_1(k)+f_2(k)=y_1(k)+y_2(k)+(k-1) \lbrace y_1(k-1)+y_2(k-1) \rbrace\\ f1(k)→y1(k),f2(k)→y2(k)f1(k)+f2(k)=y1(k)+y2(k)+(k−1){y1(k−1)+y2(k−1)}f1(k)+f2(k)→y1(k)+y2(k)f1(k)+f2(k)=y1(k)+y2(k)+(k−1){y1(k−1)+y2(k−1)}
故:方程所描述的系统是线性系统。
4、时不变系统
4.1概念
时不变系统:一个系统,在零初始条件下,其输出响应与输入信号施加于系统的时间起点无关,这样的系统称为时不变系统。
时不变性:系统具有上述的性质称为时不变性。
4.2判断方法
先时移,再经系统 = 先经系统,再时移
f ( t ) → 时 移 τ → f ( t − τ ) → H → H { f ( t − τ ) } f(t)\to 时移\tau \to f(t-\tau) \to H \to H \lbrace f(t-\tau) \rbrace \\ f(t)→时移τ→f(t−τ)→H→H{f(t−τ)}
f ( t ) → H → H { f 1 ( t ) } 令 y ( t ) = H { f 1 ( t ) } → → 时 移 τ → y ( t − τ ) \underrightarrow{f(t)} H \to H \lbrace f_1(t) \rbrace \underrightarrow{令y(t)=H \lbrace f_1(t) \rbrace} \to 时移\tau \to y(t-\tau)\\ f(t)H→H{f1(t)}令y(t)=H{f1(t)}→时移τ→y(t−τ)
若: H { f ( t − τ ) } = y ( t − τ ) H \lbrace f(t-\tau) \rbrace = y(t-\tau) H{f(t−τ)}=y(t−τ),则系统 H H H是时不变系统。
5、线性时不变系统(Linear and Time-invariant System)
线性时不变系统:系统既是线性的,又是时不变的;或系统的方程为线性常系数微分方程。
三、常用的基本信号
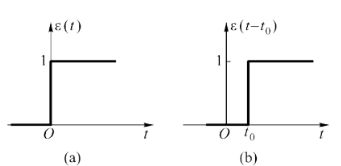
1、单位阶跃信号(unit step signal)
ϵ ( t ) = { 1 , t>0 0 , t<0 \epsilon(t) = \begin{cases} 1, & \text{t>0} \\ 0, & \text{t<0} \end{cases} ϵ(t)={1,0,t>0t<0
时移 t 0 t_0 t0
ϵ ( t − t 0 ) = { 1 , t > t 0 0 , t < t 0 \epsilon(t-t_0) = \begin{cases} 1, & t>t_0\\ 0, & t
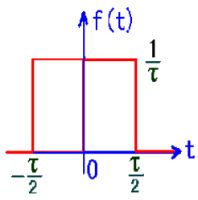
2、矩形脉冲信号(门函数)
g τ ( t ) = { 1 , ( ∣ t ∣ < τ 2 ) 0 , ( ∣ t ∣ > τ 2 ) g_\tau(t) = \begin{cases} 1, & (|t|<\frac{\tau}{2})\\ 0, & (|t|>\frac{\tau}{2}) \end{cases} gτ(t)={1,0,(∣t∣<2τ)(∣t∣>2τ)
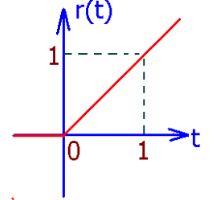
3、斜坡信号(ramp signal)
r ( t ) = { 0 , t < 0 t , t ≥ 0 r(t) = \begin{cases} 0, & t<0 \\ t, & t \geq 0 \end{cases}\\ r(t)={0,t,t<0t≥0
= t ϵ ( t ) =t\epsilon(t) =tϵ(t)
4、取样函数(sampling function)
S a ( t ) = sin t t ( − ∞ < t < + ∞ ) S_a(t)=\frac{\sin t}{t} (-\infty
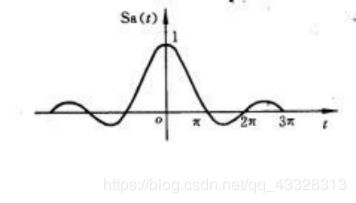
①偶函数
② 当 t = 0 t=0 t=0时, S a ( t ) = 1 S_a(t)=1 Sa(t)=1为最大值
③ 曲线呈衰减振荡
④ ∫ 0 ∞ S a ( t ) d t = π 2 , ∫ − ∞ ∞ S a ( t ) d t = π \int_0^\infty {S_a(t)} \,{\rm d}t=\frac{\pi}{2} , \int_ {-\infty}^{\infty} {S_a(t)} \,{\rm d}t=\pi ∫0∞Sa(t)dt=2π,∫−∞∞Sa(t)dt=π
取样函数常用形式 sin c ( t ) = sin π t π t = S a ( π t ) \sin c(t)=\frac{\sin \pi t}{\pi t}=S_a(\pi t) sinc(t)=πtsinπt=Sa(πt)
5、单位冲激函数(unit impulse function)
视作矩形脉冲的极限
p; 
δ ( t ) = { ∞ , t = 0 0 , t ≠ 0 \delta(t) = \begin{cases} \infty, & t=0 \\ 0, & t \neq0 \end{cases} δ(t)={∞,0,t=0t=0
∫ − ∞ ∞ δ ( t ) d t = 1 \int_ {-\infty}^\infty {\delta(t)} \,{\rm d}t=1 ∫−∞∞δ(t)dt=1
延时冲激: A δ ( t − t 0 ) A\delta(t-t_0) Aδ(t−t0)
冲激偶: δ ′ ( t ) = d δ ( t ) d t \delta \prime(t)=\frac{d\delta(t)}{dt} δ′(t)=dtdδ(t)
性质:1、偶函数: δ ( t ) = δ ( − t ) \delta(t)=\delta(-t) δ(t)=δ(−t)
2、取样性:
f ( t ) ⋅ δ ( t ) = f ( 0 ) ⋅ δ ( t ) f ( t ) ⋅ δ ( t − t 0 ) = f ( t 0 ) ⋅ δ ( t − t 0 ) f(t)\cdot \delta(t)=f(0)\cdot \delta(t)\\ f(t)\cdot \delta(t-t_0)=f(t_0)\cdot \delta(t-t_0)\\ f(t)⋅δ(t)=f(0)⋅δ(t)f(t)⋅δ(t−t0)=f(t0)⋅δ(t−t0)
∫ − ∞ ∞ f ( t ) ⋅ δ ( t ) d t = f ( 0 ) ∫ − ∞ ∞ f ( t ) ⋅ δ ( t − t 0 ) d t = f ( t 0 ) \int_ {-\infty}^\infty {f(t)\cdot \delta(t)} \,{\rm d}t=f(0)\\ \int_ {-\infty}^\infty {f(t)\cdot \delta(t-t_0)} \,{\rm d}t=f(t_0)\\ ∫−∞∞f(t)⋅δ(t)dt=f(0)∫−∞∞f(t)⋅δ(t−t0)dt=f(t0)
δ ( t ) \delta(t) δ(t)与 ϵ ( t ) \epsilon(t) ϵ(t)的关系:
∫ − ∞ t δ ( τ ) d τ = ϵ ( t ) \int_ {-\infty}^t {\delta(\tau)} \,{\rm d}\tau=\epsilon(t) ∫−∞tδ(τ)dτ=ϵ(t)
d ϵ ( t ) d t = δ ( t ) \frac{d\epsilon(t)}{dt}=\delta(t) dtdϵ(t)=δ(t)
利用该性质可对不连续函数求导。
看完就赞,养成习惯,尊重别人的劳动是一种美德!!!^ _ ^ ❤️ ❤️ ❤️
码字不易,大家的支持就是我坚持下去的动力。点赞后不要忘了关注我哦!
更多精彩内容请前往 AXYZdong的博客
如果以上内容有任何错误或者不准确的地方,欢迎在下面留个言。或者你有更好的想法,欢迎一起交流学习~~~