【信号与系统】笔记(2)连续系统的时域分析
Author:AXYZdong
自动化专业 工科男
有一点思考,有一点想法,有一点理性!
文章目录
- 前言
- 一、系统的微分方程及其响应
- 1、LTI系统的微分方程
- 2、系统的响应
- 2.1、零输入响应(储能响应)
- 2.2、零状态响应(受激响应)
- 2.3、完全响应
- 2.4、例一( y ′ ′ ( t ) + 6 y ′ ( t ) + 8 y ( t ) = f ( t ) , t > 0 y ''(t) + 6y '(t) + 8y(t) =f(t),t>0 y′′(t)+6y′(t)+8y(t)=f(t),t>0)
- 2.5、例二( y ′ ′ ( t ) + 3 y ′ ( t ) + 2 y ( t ) = 2 f ′ ( t ) + 6 f ( t ) , t > 0 y ''(t) + 3y'(t) + 2y(t) =2f'(t)+6f(t),t>0 y′′(t)+3y′(t)+2y(t)=2f′(t)+6f(t),t>0)
- 2.6、响应的分类
- 二、阶跃响应
- 1、定义
- 2、一阶系统方程的阶跃响应
- 3、阶跃响应的测量
- 三、冲激响应
- 1、定义
- 2、一阶系统的冲激响应
- 3、例一( y ′ ′ ( t ) + 5 y ′ ( t ) + 6 y ( t ) = f ( t ) y''(t)+5y'(t)+6y(t)=f(t) y′′(t)+5y′(t)+6y(t)=f(t))
- 4、例二( y ′ ′ ( t ) + 5 y ′ ( t ) + 6 y ( t ) = f ′ ′ ( t ) + 2 f ′ ( t ) + 3 f ( t ) y''(t)+5y'(t)+6y(t)=f''(t)+2f'(t)+3f(t) y′′(t)+5y′(t)+6y(t)=f′′(t)+2f′(t)+3f(t))
- 5、阶跃响应与冲激响应的关系
- 四、卷积及其应用
- 1、信号的时域分解与卷积积分
- 1.1任意信号的分解
- 1.2任意信号作用下的零输入响应
- 1.3卷积积分的定义
- 2、卷积的图解法
- 五、卷积积分的性质
- 1、奇异(冲激)函数的卷积特性
- 2、卷积的微积分性质
- 3、卷积的时移特性
- 总结
前言
以下内容是关于连续系统的时域分析,重点难点,考试常考,考前复习。
一、系统的微分方程及其响应
1、LTI系统的微分方程
描述线性时不变(LTI)系统的输入–输出特性的是常系数线性微分方程
时域分析方法:从系统的模型(微分方程)出发,在时域研究输入信号通过系统响应后的变化规律,是研究系统时域特性的重要方法。
对于电系统,建立其微分方程的依据:
K C L : ∑ i ( t ) = 0 K V L : ∑ u ( t ) = 0 V C R : U R ( t ) = R ⋅ i ( t ) , u L ( t ) = L ⋅ d i ( t ) d t , i C ( t ) = C ⋅ d u ( t ) d t KCL:\sum i(t)=0\\ KVL: \sum u(t)=0\\ VCR:U_R(t)=R \cdot i(t),u_L(t)=L\cdot \frac{di(t)}{dt},i_C(t)=C \cdot \frac{du(t)}{dt} KCL:∑i(t)=0KVL:∑u(t)=0VCR:UR(t)=R⋅i(t),uL(t)=L⋅dtdi(t),iC(t)=C⋅dtdu(t)

对于图(a)中RC电路
R C ⋅ d u C ( t ) d t + u C ( t ) = u S ( t ) 即 : u C ′ ( t ) + 1 R C ⋅ u C ( t ) = 1 R C ⋅ u S ( t ) RC \cdot \frac{du_C(t)}{dt} +u_C(t)=u_S(t)\\ 即:u ' _C(t) + \frac{1}{RC} \cdot u_C(t) = \frac{1}{RC} \cdot u_S(t) RC⋅dtduC(t)+uC(t)=uS(t)即:uC′(t)+RC1⋅uC(t)=RC1⋅uS(t)
对于图(b)中RL电路
L ⋅ d i L ( t ) R ⋅ d t + i L ( t ) = i S ( t ) 即 : i L ′ ( t ) + R L ⋅ i L ( t ) = R L ⋅ i S ( t ) \frac{L \cdot di_L(t)}{R \cdot dt} +i_L(t)=i_S(t)\\ 即:i ' _L(t) + \frac{R}{L} \cdot i_L(t) = \frac{R}{L} \cdot i_S(t) R⋅dtL⋅diL(t)+iL(t)=iS(t)即:iL′(t)+LR⋅iL(t)=LR⋅iS(t)
以上可以总结出一般形式: y ′ ( t ) + a y ( t ) = χ ( t ) y '(t)+ay(t)=\chi(t) y′(t)+ay(t)=χ(t)
2、系统的响应
2.1、零输入响应(储能响应)
从观察的初始时刻起不再施加输入信号,仅由该时刻系统本身的起始储能状态引起的响应称为零输入响应(ZIR)
2.2、零状态响应(受激响应)
当系统的储能状态为零时,由外加激励信号(输入)产生的响应称为零状态响应(ZSR)
对于一阶系统方程
y ′ ( t ) + a y ( t ) = χ ( t ) y '(t)+ay(t)=\chi(t) y′(t)+ay(t)=χ(t)
零状态响应:
y Z S ( t ) = e − a t ∫ 0 − t χ ( t ) e a τ d τ , ( t ≥ 0 ) y_{ZS}(t)=\rm e^{-at} \int_{0-}^t \chi(t) e^{a \tau} d \tau,(t \geq0) yZS(t)=e−at∫0−tχ(t)eaτdτ,(t≥0)
2.3、完全响应
y ( t ) = y Z I ( t ) + y Z S ( t ) , [ 全 响 应 = 零 输 入 + 零 状 态 ] y(t)=y_{ZI}(t)+y_{ZS}(t),[全响应=零输入+零状态] y(t)=yZI(t)+yZS(t),[全响应=零输入+零状态]
2.4、例一( y ′ ′ ( t ) + 6 y ′ ( t ) + 8 y ( t ) = f ( t ) , t > 0 y ''(t) + 6y '(t) + 8y(t) =f(t),t>0 y′′(t)+6y′(t)+8y(t)=f(t),t>0)
已知某二阶限行连续时间系统的动态方程:
y ′ ′ ( t ) + 6 y ′ ( t ) + 8 y ( t ) = f ( t ) , t > 0 初 始 条 件 : y ( 0 − ) = 1 , y ′ ( 0 − ) = 2 , 求 系 统 的 零 输 入 响 应 y''(t) + 6y'(t) + 8y(t) =f(t),t>0\\ 初始条件:y({0_-})=1,y' ({0_-})=2,求系统的零输入响应 y′′(t)+6y′(t)+8y(t)=f(t),t>0初始条件:y(0−)=1,y′(0−)=2,求系统的零输入响应
解:
系 统 的 特 征 方 程 : s 2 + 6 s + 8 = 0 , 特 征 根 : s 1 = − 2 , s 2 = − 4 故 系 统 的 零 输 入 响 应 : y X ( t ) = k 1 e − 2 t + k 2 e − 4 t , t > 0 y X ( 0 + ) = y X ( 0 − ) = y X ( 0 ) = k 1 + k 2 = 1 y ′ ( 0 ) = y X ′ ( 0 − ) = − 2 k 1 − 4 k 2 = 2 y X ( 0 ) 和 y ′ ( 0 ) 代 入 可 解 出 : k 1 = 3 , k 2 = − 2 系统的特征方程:s^2+6s+8=0,特征根:s_1=-2,s_2=-4 \\ 故系统的零输入响应:y_X(t)=k_1e^{-2t} + k_2e^{-4t},t>0 \\ y_X({0_+})=y_X({0_-}) = y_X({0}) = k_1+k_2=1\\ y'(0)=y_X'({0_-}) = -2k_1-4k_2=2\\ y_X({0})和y'(0)代入 可解出:k_1=3,k_2=-2 系统的特征方程:s2+6s+8=0,特征根:s1=−2,s2=−4故系统的零输入响应:yX(t)=k1e−2t+k2e−4t,t>0yX(0+)=yX(0−)=yX(0)=k1+k2=1y′(0)=yX′(0−)=−2k1−4k2=2yX(0)和y′(0)代入可解出:k1=3,k2=−2
可得零输入响应: y X ( t ) = 3 e − 2 t − 2 e − 4 t , t ≥ 0 y_X(t)=3e^{-2t}-2e^{-4t},t \ge0 yX(t)=3e−2t−2e−4t,t≥0
2.5、例二( y ′ ′ ( t ) + 3 y ′ ( t ) + 2 y ( t ) = 2 f ′ ( t ) + 6 f ( t ) , t > 0 y ''(t) + 3y'(t) + 2y(t) =2f'(t)+6f(t),t>0 y′′(t)+3y′(t)+2y(t)=2f′(t)+6f(t),t>0)
y ′ ′ ( t ) + 3 y ′ ( t ) + 2 y ( t ) = 2 f ′ ( t ) + 6 f ( t ) , t > 0 初 始 条 件 : y ( 0 − ) = 2 , y ′ ( 0 − ) = 0 , f ( t ) = ϵ ( t ) , 求 系 统 的 零 输 入 响 应 和 零 状 态 响 应 y ''(t) + 3y'(t) + 2y(t) =2f'(t)+6f(t),t>0\\ 初始条件:y({0_-})=2,y \prime ({0_-})=0,f(t)= \epsilon(t), \\ 求系统的零输入响应和零状态响应\\ y′′(t)+3y′(t)+2y(t)=2f′(t)+6f(t),t>0初始条件:y(0−)=2,y′(0−)=0,f(t)=ϵ(t),求系统的零输入响应和零状态响应
解:
( 1 ) 零 输 入 响 应 y X ( t ) 激 励 为 0 , 故 y X ( t ) 满 足 (1)零输入响应y_X(t)激励为0,故y_X(t)满足 (1)零输入响应yX(t)激励为0,故yX(t)满足
y X ′ ′ ( t ) + 3 y X ′ ( t ) + 2 y X ( t ) = 0 系 统 的 特 征 方 程 : s 2 + 3 s + 2 = 0 , 特 征 根 : s 1 = − 2 , s 2 = − 1 故 系 统 的 零 输 入 响 应 : y X ( t ) = k 1 e − 2 t + k 2 e − t , t > 0 y X ( 0 + ) = y X ( 0 − ) = y X ( 0 ) = 2 y ′ ( 0 ) = y X ′ ( 0 − ) = 0 y X ( 0 ) 和 y ′ ( 0 ) 代 入 可 解 出 : k 1 = 4 , k 2 = − 2 y _X''(t) + 3y_X'(t) + 2y_X(t) =0\\ 系统的特征方程:s^2+3s+2=0,特征根:s_1=-2,s_2=-1 \\ 故系统的零输入响应:y_X(t)=k_1e^{-2t} + k_2e^{-t},t>0 \\ y_X({0_+})=y_X({0_-}) = y_X({0}) =2\\ y'(0)=y_X'({0_-}) = 0\\ y_X({0})和y'(0)代入 可解出:k_1=4,k_2=-2 yX′′(t)+3yX′(t)+2yX(t)=0系统的特征方程:s2+3s+2=0,特征根:s1=−2,s2=−1故系统的零输入响应:yX(t)=k1e−2t+k2e−t,t>0yX(0+)=yX(0−)=yX(0)=2y′(0)=yX′(0−)=0yX(0)和y′(0)代入可解出:k1=4,k2=−2
可得零输入响应: y X ( t ) = 4 e − t − 2 e − 2 t , t > 0 y_X(t)=4e^{-t}-2e^{-2t},t >0 yX(t)=4e−t−2e−2t,t>0
( 2 ) 零 状 态 响 应 y f ( t ) 满 足 (2)零状态响应y_f(t)满足 (2)零状态响应yf(t)满足
y f ′ ′ ( t ) + 3 y f ′ ( t ) + 2 y f ( t ) = 2 δ ( t ) + 6 ϵ ( t ) , 并 有 y f ( 0 − ) = y f ( 0 + ) = 0 y _f''(t) + 3y_f'(t) + 2y_f(t) =2 \delta (t)+6 \epsilon(t),并有y_f({0_-}) = y_f({0_+}) = 0\\ yf′′(t)+3yf′(t)+2yf(t)=2δ(t)+6ϵ(t),并有yf(0−)=yf(0+)=0
由 于 上 式 等 号 右 端 含 有 δ ( t ) , 故 y f ′ ′ ( t ) 含 有 δ ( t ) , 从 而 y f ′ ( t ) 跃 变 , 即 y f ′ ( 0 + ) ≠ y f ′ ( 0 − ) 而 y f ( t ) 在 t = 0 处 连 续 , 即 y f ( 0 − ) = y f ( 0 + ) = 0 , 上 式 两 边 积 分 有 : [ y f ′ ( 0 + ) − y f ′ ( 0 − ) ] + 3 [ y f ( 0 − ) − y f ( 0 + ) ] + 2 ∫ 0 − 0 + y f ( t ) d t = 2 + 6 ∫ 0 − 0 + ϵ ( t ) d t 由于上式等号右端含有 \delta(t) , 故y _f''(t)含有 \delta(t),从而y_f'(t)跃变 ,即y'_f({0_+}) \neq y'_f({0_-})\\ 而y_f(t) 在t=0处连续,即y_f({0_-}) = y_f({0_+})=0,上式两边积分有:\\ [y'_f({0_+}) - y'_f({0_-})]+3[y_f({0_-}) -y_f({0_+})]+2\int_{0-}^{0+}y_f(t) dt=2+6\int_{0-}^{0+} \epsilon(t)dt 由于上式等号右端含有δ(t),故yf′′(t)含有δ(t),从而yf′(t)跃变,即yf′(0+)=yf′(0−)而yf(t)在t=0处连续,即yf(0−)=yf(0+)=0,上式两边积分有:[yf′(0+)−yf′(0−)]+3[yf(0−)−yf(0+)]+2∫0−0+yf(t)dt=2+6∫0−0+ϵ(t)dt
整理得: y f ′ ( 0 + ) = 2 + y f ′ ( 0 − ) = 2 y'_f({0_+}) =2+ y'_f({0_-})=2 yf′(0+)=2+yf′(0−)=2
对 t > 0 t>0 t>0时,有 y f ′ ′ ( t ) + 3 y f ′ ( t ) + 2 y f ( t ) = 6 y _f''(t) + 3y_f'(t) + 2y_f(t) =6 yf′′(t)+3yf′(t)+2yf(t)=6
不难求出其齐次解为: C f 1 e − t + C f 2 e − 2 t , C_{f1}e^{-t}+C_{f2}e^{-2t}, Cf1e−t+Cf2e−2t,其特解为常数 3 3 3
∴ y f ( t ) = C f 1 e − t + C f 2 e − 2 t + 3 \therefore y_f(t)=C_{f1}e^{-t}+C_{f2}e^{-2t}+3 ∴yf(t)=Cf1e−t+Cf2e−2t+3
代入初值求得: y f ( t ) = − 4 e − t + e − 2 t + 3 , t ≥ 0 y_f(t)=-4e^{-t}+e^{-2t}+3,t \geq0 yf(t)=−4e−t+e−2t+3,t≥0
2.6、响应的分类
| 分类标准 | 对应响应 |
|---|---|
| 响应的不同起因 | 储能响应、受激响应 |
| 系统的性质和输入信号的性质 | 自由响应(取决于系统性质,即特征根)、强迫响应(取决于输入信号的形式) |
| 响应的变化形式 | 瞬态响应(t无限增大,响应趋于零)、稳态响应(响应恒定或为某个稳态函数) |
二、阶跃响应
1、定义
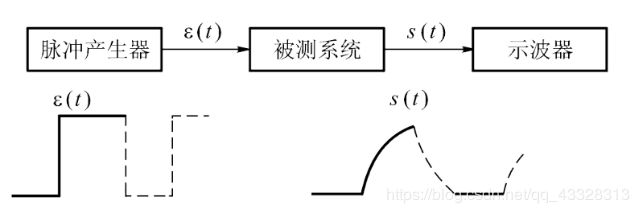
LTI系统在零状态下,由单位阶跃信号引起的响应称为单位阶跃响应,简称阶跃响应,记为 s ( t ) s(t) s(t)

2、一阶系统方程的阶跃响应
对于一阶系统方程
y ′ ( t ) + a y ( t ) = b ϵ ( t ) y '(t)+ay(t)=b\epsilon(t) y′(t)+ay(t)=bϵ(t)
则零状态响应:
y Z S ( t ) = e − a t ∫ 0 − t χ ( t ) e a τ d τ , ( t ≥ 0 ) y_{ZS}(t)=\rm e^{-at} \int_{0-}^t \chi(t) e^{a \tau} d \tau,(t \geq0) yZS(t)=e−at∫0−tχ(t)eaτdτ,(t≥0)
则阶跃响应:
y ( t ) = s ( t ) = e − a t ∫ 0 − t b ϵ ( t ) e a τ d τ = b a ⋅ ( 1 − e − a t ) , ( t ≥ 0 ) y (t)=s(t)=\rm e^{-at} \int_{0-}^t b\epsilon(t) e^{a \tau} d \tau = \frac {b}{a} \cdot(1-e^{-at}),(t \geq0) y(t)=s(t)=e−at∫0−tbϵ(t)eaτdτ=ab⋅(1−e−at),(t≥0)
3、阶跃响应的测量
三、冲激响应
1、定义
储能状态为零的系统,在单位冲激信号作用下产生的零状态响应称为冲激响应,记为 h ( t ) h(t) h(t)
2、一阶系统的冲激响应
对于一阶系统方程
y ′ ( t ) + a y ( t ) = b δ ( t ) y '(t)+ay(t)=b\delta(t) y′(t)+ay(t)=bδ(t)
则冲激响应:
y ( t ) = h ( t ) = e − a t ∫ 0 − t b δ ( t ) e a τ d τ = b ⋅ e − a t ⋅ ϵ ( t ) y (t)=h(t)=\rm e^{-at} \int_{0-}^t b\delta(t) e^{a \tau} d \tau = b \cdot e^{-at} \cdot \epsilon(t) y(t)=h(t)=e−at∫0−tbδ(t)eaτdτ=b⋅e−at⋅ϵ(t)
3、例一( y ′ ′ ( t ) + 5 y ′ ( t ) + 6 y ( t ) = f ( t ) y''(t)+5y'(t)+6y(t)=f(t) y′′(t)+5y′(t)+6y(t)=f(t))
描述某系统的微分方程为 y ′ ′ ( t ) + 5 y ′ ( t ) + 6 y ( t ) = f ( t ) y''(t)+5y'(t)+6y(t)=f(t) y′′(t)+5y′(t)+6y(t)=f(t),求其冲激响应 h ( t ) h(t) h(t)
解:根据 h ( t ) h(t) h(t)定义有 h ′ ′ ( t ) + 5 h ′ ( t ) + 6 h ( t ) = δ ( t ) , 并 且 有 h ′ ( 0 − ) = h ( 0 − ) = 0 , 先 求 h ′ ( 0 + ) 和 h ( 0 + ) h''(t)+5h'(t)+6h(t)= \delta(t),\\ 并且有 h'({0_-}) = h({0_-}) = 0,先求h'({0_+}) 和 h({0_+}) h′′(t)+5h′(t)+6h(t)=δ(t),并且有h′(0−)=h(0−)=0,先求h′(0+)和h(0+)
由 于 上 式 等 号 右 端 含 有 δ ( t ) , 故 h ′ ′ ( t ) 含 有 δ ( t ) , 从 而 h ′ ( t ) 跃 变 , 即 h ′ ( 0 + ) ≠ h ′ ( 0 − ) 而 h ( t ) 在 t = 0 处 连 续 , 即 h ( 0 − ) = h ( 0 + ) = 0 , 上 式 两 边 积 分 有 : [ h ′ ( 0 + ) − h ′ ( 0 − ) ] + 5 [ h ( 0 − ) − h ( 0 + ) ] + 6 ∫ 0 − 0 + h ( t ) d t = 1 由于上式等号右端含有 \delta(t) , 故h''(t)含有 \delta(t),从而h'(t)跃变 ,即h' ({0_+}) \neq h'({0_-})\\ 而h(t) 在t=0处连续,即h({0_-}) = h({0_+})=0,上式两边积分有:\\ [h'({0_+}) - h'({0_-})]+5[h({0_-}) -h({0_+})]+6\int_{0-}^{0+}h(t) dt=1 由于上式等号右端含有δ(t),故h′′(t)含有δ(t),从而h′(t)跃变,即h′(0+)=h′(0−)而h(t)在t=0处连续,即h(0−)=h(0+)=0,上式两边积分有:[h′(0+)−h′(0−)]+5[h(0−)−h(0+)]+6∫0−0+h(t)dt=1
整理得: h ′ ( 0 + ) = 1 + h ′ ( 0 − ) = 1 h'({0_+}) =1+ h'({0_-})=1 h′(0+)=1+h′(0−)=1
对 t > 0 t>0 t>0时,有 h ′ ′ ( t ) + 5 h ′ ( t ) + 6 h ( t ) = 0 h''(t)+5h'(t)+6h(t)=0 h′′(t)+5h′(t)+6h(t)=0
不难求出其齐次解为: C 1 e − 2 t + C 2 e − 3 t , C_{1}e^{-2t}+C_{2}e^{-3t}, C1e−2t+C2e−3t,
∴ h ( t ) = ( C 1 e − 2 t + C 2 e − 3 t ) ⋅ ϵ ( t ) \therefore h(t)=(C_{1}e^{-2t}+C_{2}e^{-3t}) \cdot \epsilon(t) ∴h(t)=(C1e−2t+C2e−3t)⋅ϵ(t)
代入初值求得: h ( t ) = ( e − 2 t − e − 3 t ) ⋅ ϵ ( t ) h(t)=(e^{-2t}-e^{-3t}) \cdot \epsilon(t) h(t)=(e−2t−e−3t)⋅ϵ(t)
4、例二( y ′ ′ ( t ) + 5 y ′ ( t ) + 6 y ( t ) = f ′ ′ ( t ) + 2 f ′ ( t ) + 3 f ( t ) y''(t)+5y'(t)+6y(t)=f''(t)+2f'(t)+3f(t) y′′(t)+5y′(t)+6y(t)=f′′(t)+2f′(t)+3f(t))
描述某系统的微分方程为 y ′ ′ ( t ) + 5 y ′ ( t ) + 6 y ( t ) = f ′ ′ ( t ) + 2 f ′ ( t ) + 3 f ( t ) y''(t)+5y'(t)+6y(t)=f''(t)+2f'(t)+3f(t) y′′(t)+5y′(t)+6y(t)=f′′(t)+2f′(t)+3f(t),求其冲激响应 h ( t ) h(t) h(t)
解:根据 h ( t ) h(t) h(t)定义有
h ′ ′ ( t ) + 5 h ′ ( t ) + 6 h ( t ) = δ ′ ′ ( t ) + 2 δ ′ ( t ) + 3 δ ( t ) (1) h''(t)+5h'(t)+6h(t)=\delta''(t) + 2\delta'(t) +3\delta(t) \\ \tag{1} h′′(t)+5h′(t)+6h(t)=δ′′(t)+2δ′(t)+3δ(t)(1)
并 且 有 h ′ ( 0 − ) = h ( 0 − ) = 0 , 先 求 h ′ ( 0 + ) 和 h ( 0 + ) 并且有 h'({0_-}) = h({0_-}) = 0,先求h'({0_+}) 和 h({0_+}) 并且有h′(0−)=h(0−)=0,先求h′(0+)和h(0+)
由方程可知: h ( t ) h(t) h(t)中含有 δ ( t ) \delta(t) δ(t)
故令:
{ h ( t ) = a δ ( t ) + P 1 ( t ) , [ P i ( t ) 中 为 不 含 有 δ ( t 的 函 数 ) ] h ′ ( t ) = a δ ′ ( t ) + b δ ( t ) + P 2 ( t ) h ′ ′ ( t ) = a δ ′ ′ ( t ) + b δ ′ ( t ) + c δ ( t ) + P 3 ( t ) \begin{cases} h(t)=a \delta(t) +P_1(t) , [P_i(t)中为不含有\delta(t的函数) ]\\ h'(t)=a \delta'(t) + b \delta(t) + P_2(t)\\ h''(t)=a \delta''(t) + b \delta'(t) + c \delta(t) + P_3(t)\\ \end{cases} ⎩⎪⎨⎪⎧h(t)=aδ(t)+P1(t),[Pi(t)中为不含有δ(t的函数)]h′(t)=aδ′(t)+bδ(t)+P2(t)h′′(t)=aδ′′(t)+bδ′(t)+cδ(t)+P3(t)
代入式(1)整理得:
a δ ′ ′ ( t ) + ( b + 5 a ) δ ′ ( t ) + ( 6 a + 5 b + c ) δ ( t ) + P 1 ( t ) + P 2 ( t ) + P 3 ( t ) = δ ′ ′ ( t ) + 2 δ ′ ( t ) + 3 δ ( t ) a \delta''(t) + (b+5a) \delta'(t) + (6a+5b+c) \delta(t) + P_1(t)+P_2(t)+ P_3(t)=\delta''(t) + 2\delta'(t) +3\delta(t) aδ′′(t)+(b+5a)δ′(t)+(6a+5b+c)δ(t)+P1(t)+P2(t)+P3(t)=δ′′(t)+2δ′(t)+3δ(t)
利用 δ ( t ) \delta(t) δ(t)系数匹配,得 a = 1 , b = − 3 , c = 12 a=1,b=-3,c=12 a=1,b=−3,c=12
h ( t ) = δ ( t ) + P 1 ( t ) (2) h(t)= \delta(t) +P_1(t) \tag{2} h(t)=δ(t)+P1(t)(2)
h ′ ( t ) = δ ′ ( t ) − 3 δ ( t ) + P 2 ( t ) (3) h'(t)= \delta'(t) -3 \delta(t) + P_2(t) \tag{3} h′(t)=δ′(t)−3δ(t)+P2(t)(3)
h ′ ′ ( t ) = δ ′ ′ ( t ) − 3 δ ′ ( t ) + 12 δ ( t ) + P 3 ( t ) (4) h''(t)= \delta''(t) -3 \delta'(t) + 12 \delta(t) + P_3(t) \tag{4} h′′(t)=δ′′(t)−3δ′(t)+12δ(t)+P3(t)(4)
对 式 ( 3 ) 从 0 − 到 0 + 积 分 h ( 0 + ) − h ( 0 − ) = − 3 对 式 ( 4 ) 从 0 − 到 0 + 积 分 h ′ ( 0 + ) − h ′ ( 0 − ) = 12 对式(3)从0_{-}到0_{+}积分h(0_{+})-h(0_{-})=-3 \\ 对式(4)从0_{-}到0_{+}积分h'(0_{+})-h'(0_{-})=12 对式(3)从0−到0+积分h(0+)−h(0−)=−3对式(4)从0−到0+积分h′(0+)−h′(0−)=12
对 t > 0 t>0 t>0时,有 h ′ ′ ( t ) + 5 h ′ ( t ) + 6 h ( t ) = 0 , 特 征 根 − 2 , − 3 h''(t)+5h'(t)+6h(t)=0,特征根-2,-3 h′′(t)+5h′(t)+6h(t)=0,特征根−2,−3
不难求出其齐次解为: C 1 e − 2 t + C 2 e − 3 t , C_{1}e^{-2t}+C_{2}e^{-3t}, C1e−2t+C2e−3t,
∴ h ( t ) = ( C 1 e − 2 t + C 2 e − 3 t ) ⋅ ϵ ( t ) \therefore h(t)=(C_{1}e^{-2t}+C_{2}e^{-3t}) \cdot \epsilon(t) ∴h(t)=(C1e−2t+C2e−3t)⋅ϵ(t)
代入初始条件 h ( 0 + ) = − 3 , h ′ ( 0 + ) = 12 h(0_{+})=-3,h'(0_{+}) =12 h(0+)=−3,h′(0+)=12求得: h ( t ) = ( 3 e − 2 t − 6 e − 3 t ) ⋅ ϵ ( t ) h(t)=(3e^{-2t}-6e^{-3t}) \cdot \epsilon(t) h(t)=(3e−2t−6e−3t)⋅ϵ(t)
结 合 式 ( 2 ) , h ( t ) = δ ( t ) + ( 3 e − 2 t − 6 e − 3 t ) ⋅ ϵ ( t ) 结合式(2),h(t)= \delta(t)+(3e^{-2t}-6e^{-3t}) \cdot \epsilon(t) 结合式(2),h(t)=δ(t)+(3e−2t−6e−3t)⋅ϵ(t)
5、阶跃响应与冲激响应的关系
{ h ( t ) = d s ( t ) d t s ( t ) = ∫ − ∞ t h ( τ ) d τ \begin{cases} h(t)= \frac{ds(t)}{dt}\\ \\ s(t)= \int _{-\infty}^{t}h( \tau ) d \tau \end{cases} ⎩⎪⎨⎪⎧h(t)=dtds(t)s(t)=∫−∞th(τ)dτ
四、卷积及其应用
1、信号的时域分解与卷积积分
1.1任意信号的分解

“ 0 " “0" “0"号脉冲高度 f ( 0 ) f(0) f(0),宽度 Δ \Delta Δ,用 p ( t ) p(t) p(t)表示为 f ( 0 ) Δ p ( t ) f(0) \Delta p(t) f(0)Δp(t)
“ 1 " “1" “1"号脉冲高度 f ( Δ ) f(\Delta) f(Δ),宽度 Δ \Delta Δ,用 p ( t − Δ ) p(t-\Delta) p(t−Δ)表示为 f ( Δ ) Δ p ( t − Δ ) f(\Delta) \Delta p(t-\Delta) f(Δ)Δp(t−Δ)
“ − 1 " “-1" “−1"号脉冲高度 f ( − Δ ) f(-\Delta) f(−Δ),宽度 Δ \Delta Δ,用 p ( t + Δ ) p(t+\Delta) p(t+Δ)表示为 f ( − Δ ) Δ p ( t + Δ ) f(-\Delta) \Delta p(t+\Delta) f(−Δ)Δp(t+Δ)
f ( t ) ^ = ∑ n = − ∞ ∞ f ( n Δ ) Δ p ( t − n Δ ) \hat {f(t)}=\sum_{n=-\infty}^{\infty}f(n\Delta) \Delta p(t-n\Delta) f(t)^=∑n=−∞∞f(nΔ)Δp(t−nΔ)
lim Δ → 0 f ( t ) ^ = f ( t ) = ∫ − ∞ ∞ f ( τ ) δ ( t − τ ) d τ \lim_{\Delta \to 0} \hat{f(t)} =f(t) = \int _{-\infty}^{\infty} f(\tau) \delta(t- \tau) d \tau Δ→0limf(t)^=f(t)=∫−∞∞f(τ)δ(t−τ)dτ
1.2任意信号作用下的零输入响应

根据 h ( t ) h(t) h(t)定义:
δ ( t ) ⟹ h ( t ) \delta(t) \implies h(t) δ(t)⟹h(t)
由时不变性:
δ ( t − τ ) ⟹ h ( t − τ ) \delta(t - \tau) \implies h(t - \tau) δ(t−τ)⟹h(t−τ)
由齐次性:
f ( τ ) δ ( t − τ ) ⟹ f ( τ ) h ( t − τ ) f(\tau) \delta(t - \tau) \implies f(\tau) h (t - \tau) f(τ)δ(t−τ)⟹f(τ)h(t−τ)
由叠加性:
∫ − ∞ + ∞ f ( τ ) δ ( t − τ ) d τ ⟹ ∫ − ∞ + ∞ f ( τ ) h ( t − τ ) d τ \int_{- \infty}^{+\infty} f(\tau) \delta(t - \tau) d\tau \implies \int_{- \infty}^{+\infty} f(\tau) h (t - \tau) d\tau ∫−∞+∞f(τ)δ(t−τ)dτ⟹∫−∞+∞f(τ)h(t−τ)dτ
y f ( t ) = ∫ − ∞ + ∞ f ( τ ) h ( t − τ ) d τ , 卷 积 积 分 y_f(t)=\int_{- \infty}^{+\infty} f(\tau) h(t - \tau) d\tau ,卷积积分 yf(t)=∫−∞+∞f(τ)h(t−τ)dτ,卷积积分
1.3卷积积分的定义
已知定义在区间 ( − ∞ , + ∞ ) (-\infty,+\infty) (−∞,+∞)上的两个函数 f 1 ( t ) f_1(t) f1(t)和 f 2 ( t ) f_2(t) f2(t),则定义积分 f ( t ) = ∫ − ∞ + ∞ f 1 ( τ ) f 2 ( t − τ ) d τ f(t)=\int_{- \infty}^{+\infty} f_1(\tau) f_2(t - \tau) d\tau f(t)=∫−∞+∞f1(τ)f2(t−τ)dτ
为 f 1 ( t ) f_1(t) f1(t)和 f 2 ( t ) f_2(t) f2(t)的卷积积分,简称卷积;记为
f ( t ) = f 1 ( t ) ∗ f 2 ( t ) f(t)=f_1(t) *f_2(t) f(t)=f1(t)∗f2(t)
温馨提醒: τ \tau τ 为积分变量,积分后的结果为关于 t t t 的函数
y f ( t ) = ∫ − ∞ + ∞ f ( τ ) h ( t − τ ) d τ = f 1 ( t ) ∗ h ( t ) y_f(t)=\int_{- \infty}^{+\infty} f(\tau) h(t - \tau) d\tau =f_1(t) *h(t) yf(t)=∫−∞+∞f(τ)h(t−τ)dτ=f1(t)∗h(t)
2、卷积的图解法
f 1 ( t ) ∗ f 2 ( t ) = ∫ − ∞ + ∞ f 1 ( τ ) f 2 ( t − τ ) d τ f_1(t) *f_2(t) = \int_{- \infty}^{+\infty} f_1(\tau) f_2(t - \tau) d\tau f1(t)∗f2(t)=∫−∞+∞f1(τ)f2(t−τ)dτ
四步图解法:
(1)换元: t 换 为 τ → f 1 ( τ ) , f 2 ( τ ) t 换为 \tau \to f_1(\tau), f_2(\tau) t换为τ→f1(τ),f2(τ)
(2)反转平移(折叠平移): f 2 ( τ ) 反 转 → f 2 ( − τ ) , 再 右 移 t → f 2 ( − ( τ − t ) ) = f 2 ( t − τ ) f_2(\tau)反转\to f_2(-\tau),再右移t\to f_2(-(\tau -t))=f_2(t- \tau) f2(τ)反转→f2(−τ),再右移t→f2(−(τ−t))=f2(t−τ)【左加右减在 τ \tau τ的里面】
(3)乘积: f 1 ( τ ) f 2 ( t − τ ) f_1(\tau) f_2(t - \tau) f1(τ)f2(t−τ)
(4)积分: τ \tau τ从 − ∞ -\infty −∞到 + ∞ +\infty +∞对乘积项积分

总结:图解法步骤比较繁杂,但是按照四步法“战略”就可以一步步把题目搞定。不过,图解法对于求某一时刻的卷积值还是比较方便的,对于简单的信号,通过画图就可以直观的求出某一时刻的卷积值。
五、卷积积分的性质
1、奇异(冲激)函数的卷积特性
1、 f ( t ) ∗ δ ( t ) = δ ( t ) ∗ f ( t ) = f ( t ) f(t)*\delta(t) = \delta(t)* f(t) = f(t) f(t)∗δ(t)=δ(t)∗f(t)=f(t)
2、 f ( t ) ∗ δ ′ ( t ) = f ′ ( t ) , f ( t ) ∗ δ ( n ) ( t ) = f ( n ) ( t ) f(t)* \delta'(t) = f'(t) , f(t)* \delta^{(n)}(t) = f^{(n)}(t) f(t)∗δ′(t)=f′(t),f(t)∗δ(n)(t)=f(n)(t)
3、 f ( t ) ∗ ϵ ( t ) = ∫ − ∞ + ∞ f ( τ ) ϵ ( t − τ ) d τ = ∫ − ∞ t f ( τ ) d τ f(t)*\epsilon(t) = \int_{-\infty}^{+\infty} f(\tau) \epsilon(t- \tau)d\tau = \int_{-\infty}^{t} f(\tau) d\tau f(t)∗ϵ(t)=∫−∞+∞f(τ)ϵ(t−τ)dτ=∫−∞tf(τ)dτ
ϵ ( t ) ∗ ϵ ( t ) = t ϵ ( t ) \epsilon(t)*\epsilon(t) = t\epsilon(t) ϵ(t)∗ϵ(t)=tϵ(t)【重点关注】
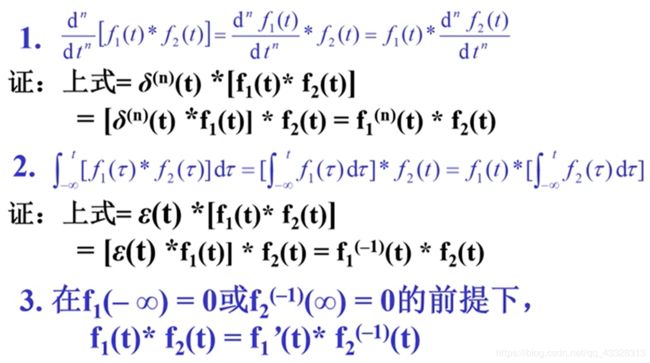
2、卷积的微积分性质
3、卷积的时移特性
卷积的时移特性说白了就是:一个卷积积分,时间 t t t 无论左移还是右移,其积分值等于相应函数左移或右移后的函数值。下面通过一个公式来说明:
若: f ( t ) = f 1 ( t ) ∗ f 2 ( t ) , f(t)=f_1(t)*f_2(t), f(t)=f1(t)∗f2(t),
则: f 1 ( t − t 1 ) ∗ f 2 ( t − t 2 ) = f 1 ( t − t 1 − t 2 ) ∗ f 2 ( t ) = f 1 ( t ) ∗ f 2 ( t − t 1 − t 2 ) = f ( t − t 1 − t 2 ) f_1(t-t_1)*f_2(t-t_2) \\ = f_1(t-t_1-t_2)*f_2(t)\\ = f_1(t)*f_2(t-t_1-t_2)\\ =f (t-t_1-t_2) f1(t−t1)∗f2(t−t2)=f1(t−t1−t2)∗f2(t)=f1(t)∗f2(t−t1−t2)=f(t−t1−t2)
总结
连续系统的时域分析,重点难点内容,多看、多做、多动手。
零输入、零状态、阶跃、冲激
卷积积分【重点关注】
上一篇笔记承蒙各位小伙伴的厚爱,访问量蹭蹭上涨,然而我不食言,继续更,希望喜欢。
如果文章中有哪些知识点写错的地方,欢迎私信我
如果文章中哪些知识点不理解的地方,欢迎私信我
如果文章中还有哪些需要补充的地方,欢迎私信我
码字不易,大家的支持就是我坚持下去的动力。点赞后不要忘了关注我哦!