simulink中s-function使用
s-function是用于单输入单输出系统模块。多输入多输出可以通过Mux跟Demux对信号进行组合和分离;仿真时 simulink的路径跟s-function需要统一下,可以先运行一下s-function函数 把路径确认一下,要不然老是报出来 s-function找不到。
转自:http://blog.sina.com.cn/s/blog_4b013fb10100nbdm.html
最近看了一下无刷直流电机的相关概念及仿真,看到大多数的文献仿真中都使用到了S函数,因此下了点资料看了一番,在本博文中简单地说一下S函数的概念及使用。
S函数即系统函数System Function的意思,为什么要使用S函数呢?是因为在研究中,有时需要用到复杂的算法设计等,而这些算法因为其复杂性不适合用普通的Simulink模块来搭建,即matlab所提供的Simulink模块不能满足用户的需求,需要用编程的形式设计出S函数模块,将其嵌入到系统中。如果恰当地使用S函数,理论上,可以在Simulink下对任意复杂的系统进行仿真。
S函数具有固定的程序格式,用matlab语言可以编写S函数,此外还允许用户使用C、C++、Fortran和Ada等语言进行编写,用非matlab语言进行编写时,需要采用编译器生成动态链接库DLL文件。
在主窗口中输入sfundemos,或者点击Simulink->User-Defined Functions->S-Function Examples,即可出现如图1所示的界面,可以选择对应的编程语言查看演示文件。

图1 S函数范例库
Matlab为了用户使用方便,有一个S函数的模板sfuntmpl.m,一般来说,我们仅需要在sfuntmpl.m的基础上进行修改即可。在主窗口输入edit sfuntmpl即可出现模板函数的内容,可以详细地观察其帮助说明以便更好地了解S函数的工作原理。模板函数的定义形式为function[sys,x0,str,ts]=sfuntmpl(t,x,u,flag),一般来说,S函数的定义形式为[sys,x0,str,ts]=sfunc(t,x,u,flag,p1,…Pn),其中的sfunc为自己定义的函数名称,以上参数中,t、x、u分别对应时间、状态、输入信号,flag为标志位,其取值不同,S函数执行的任务和返回的数据也是不同的,pn为额外的参数,sys为一个通用的返回参数值,其数值根据flag的不同而不同,x0为状态初始数值,str在目前为止的matlab版本中并没有什么作用,一般str=[]即可,ts为一个两列的矩阵,包含采样时间和偏移量两个参数,如果设置为[0 0],那么每个连续的采样时间步都运行,[-1 0]则表示按照所连接的模块的采样速率进行,[0.25 0.1]表示仿真开始的0.1s后每0.25s运行一次,采样时间点为TimeHit=n*period+offset。
S函数的使用过程中有2个概念值得注意:1、direct feedthrough,系统的输出是否直接和输入相关联,即输入是否出现在输出端的标志,若是为1,否则为0,一般可以根据在flag=3的时候,mdlOutputs函数是否调用输入u来判断是否直接馈通。2、dynamically sized inputs,主要给出连续状态的个数、离散状态的个数、输入数目、输出数目和直接馈通否。
S函数中目前支持的flag选择有0、1、2、3、4、9等几个数值,下面说一下在不同的flag情况下S函数的执行情况。1)flag=0。进行系统的初始化过程,调用mdlInitializeSizes函数,对参数进行初始化设置,比如离散状态个数、连续状态个数、模块输入和输出的路数、模块的采样周期个数、状态变量初始数值等。2)flag=1。进行连续状态变量的更新,调用mdlDerivatives函数。3)flag=2。进行离散状态变量的更新,调用mdlUpdate函数。4)flag=3。求取系统的输出信号,调用mdlOutputs函数。5)flag=4。调用mdlGetTimeOfNextVarHit函数,计算下一仿真时刻,由sys返回。6)flag=9。终止仿真过程,调用mdlTerminate函数。

图2 不同flag情况下S函数执行情况
在实际仿真过程中,Simulink会自动将flag设置为0,进行初始化过程,然后将flag的数值设置为3,计算模块的输出,一个仿真周期后,Simulink将flag的数值先后设置为1和2,更新系统的连续和离散状态,再将其设置为3,计算模块的输出,如此循环直至仿真结束条件满足。
在S函数的编写过程中,首先需要搞清楚模块中有多少个连续和离散状态,离散模块的采样周期是如何的,同时需要了解模块的连续和离散的状态方程分别是什么,输出如何表示。下面以实例说明S函数的具体应用。
实例一:在进行BLDC的速度电流双闭环控制时候,如果电流采用滞缓控制,那么速度环的输出作为参考电流的输入Is,A、B、C三相的参考电流分别为I_ar、I_br、I_cr,转子的位置记为Pos,那么转子位置和三相参考电流之间的关系表如图3所示。

图3 转子位置和三相参考电流的关系表
分析系统情况:输入为两路,一是角度Angle,通过mod(angle,2*pi)转化为Pos,二是参考电流输入Is,输出为三路,分别为A、B、C的三相参考电流,离散和连续的状态均为0,输入端出现在输出端,将S函数命名为given_current,其程序代码如下所示:
%参考电流模块
%Author:[email protected]
%很明显:2个输入分别为角度和速度控制器的输出、3个输出为三相电流的参考电流、为直通模型
function [sys,x0,str,ts]=cemf(t,x,u,flag)
clc;
switch flag
case 0
[sys,x0,str,ts]=mdlInitializeSizes; %初始化
case 1
sys=[]; %连续状态的更新
case 2
sys=[]; %离散状态的更新
case 3
sys=mdlOutputs(u); %求取系统的输出信号
case 4
sys=[]; %计算下一时刻的仿真时间
case 9
sys=[]; %终止仿真
otherwise
error(['Unhandled flag=',num2str(flag)]);
end
%%%%%在flag=0的时候进行整个系统的初始化
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes; %读入初始化参数模板
sizes.NumContStates = 0; %连续状态个数
sizes.NumDiscStates = 0; %离散状态个数
sizes.NumOutputs = 3; %输出变量个数
sizes.NumInputs = 2; %输入信号个数
sizes.DirFeedthrough = 1; %输入直接传入输出信号否
sizes.NumSampleTimes = 1; % at least one sample time is neededWO 一般来说为1个
sys = simsizes(sizes);
x0=[]; %状态初始化
str=[];
ts=[-1 0]; %采样周期若写成-1表示继承其输入信号
%%%%%%在flag=1的时候进行连续系统状态的更新
function sys=mdlDerivatives(t,x,u)
sys = [];
%%%%%%在flag=2的时候进行离散系统状态的更新
function sys=mdlUpdates
%sys(1,1)=x(1)+T*x(2); %为什么会写成这样呢
%sys(2,1)=x(2)+T*fst2(x,u,r,h);
%%%%%%在flag=3的时候进行系统输出信号的求取
function sys=mdlOutputs(u)
m=current_dq(u(1),u(2));
sys(1,1)=m(1);
sys(2,1)=m(2);
sys(3,1)=m(3);
%%%%%%在flag=4的时候进行下一时刻仿真时间的计算
function sys=mdlGetTimeOfNextVarHit(t,x,u)
%sampleTime = 1; % Example, set the next hit to be one second later.
%sys = t + sampleTime;
%%%%%%在flag=9的时候终止仿真过程
function sys=mdlTerminate(t,x,u)
%sys = [];
如果某个flag对应的函数不起作用,我们将其所调用的函数设为空或者sys=[],为了保持模块化以便思路清晰和方便扩充,一般不要使用case {1,4,9 }的形式,而是一个一个的列出。在以上代码中,在flag=3的时候调用了自编的子程序m=current_dq(u(1),u(2)),current_dq的代码如下:
%%%%%%用户自定义子程序
function x=current_dq(angle,current)
pos=mod(angle,2*pi);
x(1)=current;
x(2)=-current;
x(3)=0;
if 0<=pos && pos
x(1)=current;
x(2)=-current;
x(3)=0;
end
if pi/3<=pos && pos<2*pi/3
x(1)=current;
x(2)=0;
x(3)=-current;
end
if 2*pi/3<=pos && pos
x(1)=0;
x(2)=current;
x(3)=-current;
end
if pi<=pos && pos<4*pi/3
x(1)=-current;
x(2)=current;
x(3)=0;
end
if 4*pi/3<=pos && pos<5*pi/3
x(1)=-current;
x(2)=0;
x(3)=current;
end
if 5*pi/3<=pos && pos<2*pi
x(1)=0;
x(2)=-current;
x(3)=current;
end
S函数的代码完成后,下面进行Simulink模块的搭建,如图4所示,其中的S-Function模块提取路径为Simulink->User-Defined Functions->S-Function,双击S-Function模块,在name行中输入函数名称given_current即可,仿真结果如图5所示。

图4 参考电流模块Simulink测试图

图5 参考电流模块测试结果
实例二:我觉得对于不做理论研究的我来说,如果用到S函数的话,一般的情况就如实例一的情况那样,没有离散和连续的状态,只需要对输入做某些运算或者判断就可。上学期学的一门交流调速的课程,问题稍微复杂一点,在此也说一下。
对于含有齿隙环节的闭环系统,系统控制量反映了系统运动方向的变化,可以对系统控制量U加一个补偿量Ucomp以缩短系统在齿隙内的运行时间,补偿控制系统框图如图6所示。具体的补偿规则为:
if U(k)>0 and U(k-1)<=0 then flag=1
if U(k)<0 and U(k-1)>=0 then flag=1 Ucomp=flag*const*exp(-t/T0)

图6 补偿控制系统框图
分析系统情况:需离散状态变量,系统状态方程X1(k+1)=U(k)、X2(k+1)=f(X1(k),U(k)),其中f代表一个如上等式所示的关系,输出Y= flag*const*exp(-t/T0),因此得到如下的信息,输入为一路,即为图6中的u,输出为一路,连续状态个数为0,离散状态个数为2,输入端不出现在输出端,将S函数命名为comp,根据以上分析,其程序代码如下所示:
%Author:[email protected]
%Note:实现基于规则的补偿算法
%2个离散状态、0个连续状态、1个输入信号、1个输出信号、输出不涉及输入信号
function [sys,x0,str,ts]=comp(t,x,u,flag)
clc;
global Cflag;
global Cont;
global T0;
Cont=20;
T0=1.5;
switch flag
case 0
[sys,x0,str,ts]=mdlInitializeSizes; %初始化
case 1
sys=mdlDerivatives(t,x,u); %连续状态的更新
case 2
sys=mdlUpdates(t,x,u); %离散状态的更新
case 3
sys=mdlOutputs(t,x,u); %求取系统的输出信号
case 4
sys=mdlGetTimeOfNextVarHit(t,x,u); %计算下一时刻的仿真时间
case 9
sys=mdlTerminate(t,x,u); %终止仿真
otherwise
error(['Unhandled flag=',num2str(flag)]);
end
%%%%%在flag=0的时候进行整个系统的初始化
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes; %读入初始化参数模板
sizes.NumContStates = 0; %连续状态个数
sizes.NumDiscStates = 2; %离散状态个数
sizes.NumOutputs = 1; %输出变量个数
sizes.NumInputs = 1; %输入信号个数
sizes.DirFeedthrough = 0; %输入直接传入输出信号否
sizes.NumSampleTimes = 1; % at least one sample time is neededWO 一般来说为1个
sys = simsizes(sizes);
x0=[0;0]; %状态初始化
str=[];
ts=[-1 0]; %采样周期若写成-1表示继承其输入信号
%%%%%%在flag=1的时候进行连续系统状态的更新
function sys=mdlDerivatives(t,x,u)
sys = [];
%%%%%%在flag=2的时候进行离散系统状态的更新
function sys=mdlUpdates(t,x,u)
global Cflag;
global Cont;
global T0;
Cflag=comp_decide(t,x,u);
sys(1,1)=u;
sys(2,1)=Cflag*Cont*exp(-t/T0);
%%%%%%在flag=3的时候进行系统输出信号的求取
function sys=mdlOutputs(t,x,u)
sys=x(2);
%%%%%%在flag=4的时候进行下一时刻仿真时间的计算
function sys=mdlGetTimeOfNextVarHit(t,x,u)
%sampleTime = 1; % Example, set the next hit to be one second later.
%sys = t + sampleTime;
%%%%%%在flag=9的时候终止仿真过程
function sys=mdlTerminate(t,x,u)
sys = [];
可以看出,这里的S函数比实例1的S函数多用到了离散状态更新函数mdlUpdates,注意状态的更新方程的写法,sys=x(n+1),可以通过help sfuntmpl查看。在以上代码中,在flag=2的时候调用了自编的子程序m=comp_decide(t,x,u),comp_decide的代码如下:
%%%%%%用户自定义子程序
function cc=comp_decide(t,x,u)
cc=0;
if u>0 && x(1)<=0
cc=1;
end;
if u<0 && x(1)>=0
cc=-1;
end;
最后,将S函数嵌入到Simulink中,所搭建的补偿仿真框图如图7所示,我们通过Scope4观察控制量U和补偿Ucomp,其中cont为20,To=1.5。图8为补偿系统中U和Ucomp仿真结果局部放大图,可见,系统可以捕捉到控制量过零点的时刻并给出相应的补偿量。

图7 补偿系统Simulink仿真框图

图8 补偿系统中U和Ucomp仿真结果局部放大图
参考文献
[1] 薛定宇 著.控制系统仿真与计算机辅助设计[M].北京:机械工业出版社出版社,2009.
[2] 很好的S函数学习资料-Simulink的S-Function编写指导[EB/OL].
http://www.ilovematlab.cn/thread-71226-1-1.html.[2010-12-26].
[3] Simulink-s_function使用及应用举例[EB/OL].
http://www.ilovematlab.cn/thread-62299-1-1.html.[2010-12-26].
[4] 祁麟.交流伺服系统齿隙非线性控制及其网络化研究[D].硕士论文.南京理工大学,006.
2010年12月26日晚上完成于njust 电工楼 310房间
CopyRight:版权所有若需转载或使用请联系作者
Email:dingqian12345@126.com
实例:
http://wenku.baidu.com/link?url=yx8PnZBSpkHjjWTxYfXHri4d3VzuGraRsu1fR5loBU_3C4Ml8745zOT7tFpT3aqA3cOBHsVz9FdWIX1ESgDyiy0myF9ku4y40Kn5R72z9jK

function [sys,x0,str,ts,simStateCompliance] = mysfun4(t,x,u,flag)
switch flag,
%%%%%%%%%%%%%%%%%%
% Initialization %
%%%%%%%%%%%%%%%%%%
case 0,
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
%%%%%%%%%%%%%%%
% Derivatives %
%%%%%%%%%%%%%%%
case 1,
sys=mdlDerivatives(t,x,u);
%%%%%%%%%%
% Update %
%%%%%%%%%%
case 2,
sys=mdlUpdate(t,x,u);
%%%%%%%%%%%
% Outputs %
%%%%%%%%%%%
case 3,
sys=mdlOutputs(t,x,u);
%%%%%%%%%%%%%%%%%%%%%%%
% GetTimeOfNextVarHit %
%%%%%%%%%%%%%%%%%%%%%%%
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
%%%%%%%%%%%%%
% Terminate %
%%%%%%%%%%%%%
case 9,
sys=mdlTerminate(t,x,u);
%%%%%%%%%%%%%%%%%%%%
% Unexpected flags %
%%%%%%%%%%%%%%%%%%%%
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
% end sfuntmpl
%
%=============================================================================
% mdlInitializeSizes
% Return the sizes, initial conditions, and sample times for the S-function.
% flag=0时进行整个系统的初始化
%=============================================================================
%
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
%
% call simsizes for a sizes structure, fill it in and convert it to a
% sizes array.
%
% Note that in this example, the values are hard coded. This is not a
% recommended practice as the characteristics of the block are typically
% defined by the S-function parameters.
%
sizes = simsizes;
sizes.NumContStates = 3;%连续状态个数
sizes.NumDiscStates = 0;%离散状态格式
sizes.NumOutputs = 1;%输出变量个数
sizes.NumInputs = 1;%输入信号个数
sizes.DirFeedthrough = 0;%输入直接传入输出信号否
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
%
% initialize the initial conditions
%
x0 = [0;0;0];%初始化
%
% str is always an empty matrix
%
str = [];
%
% initialize the array of sample times
%
ts = [0 0];%采样周期若写成-1表示继承其输入信号
% Specify the block simStateCompliance. The allowed values are:
% 'UnknownSimState', < The default setting; warn and assume DefaultSimState
% 'DefaultSimState', < Same sim state as a built-in block
% 'HasNoSimState', < No sim state
% 'DisallowSimState' < Error out when saving or restoring the model sim state
simStateCompliance = 'UnknownSimState';
% end mdlInitializeSizes
%
%=============================================================================
% mdlDerivatives
% Return the derivatives for the continuous states.
% flag=1时进行连续系统状态的更新
%=============================================================================
%
function sys=mdlDerivatives(t,x,u)
x(1)=1*x(1)-1*x(2)-2*x(3)+u;
x(2)=2*x(2)-1*x(3);
x(3)=3*x(3)+u;
sys = x;
% end mdlDerivatives
%
%=============================================================================
% mdlUpdate
% Handle discrete state updates, sample time hits, and major time step
% requirements.
% flag=2时进行离散系统状态的更新
%=============================================================================
%
function sys=mdlUpdate(t,x,u)
sys = [];
% end mdlUpdate
%
%=============================================================================
% mdlOutputs
% Return the block outputs.
% flag=3时进行系统输出信号的求取
%=============================================================================
%
function sys=mdlOutputs(t,x,u)
sys = 1*x(1)-2*x(3)+3*x(3);
% end mdlOutputs
%
%=============================================================================
% mdlGetTimeOfNextVarHit
% Return the time of the next hit for this block. Note that the result is
% absolute time. Note that this function is only used when you specify a
% variable discrete-time sample time [-2 0] in the sample time array in
% mdlInitializeSizes.
% flag=4时进行下一刻仿真时间的计算
%=============================================================================
%
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 1; % Example, set the next hit to be one second later.
sys = t + sampleTime;
% end mdlGetTimeOfNextVarHit
%
%=============================================================================
% mdlTerminate
% Perform any end of simulation tasks.
% flag=9时进行终止仿真过程
%=============================================================================
%
function sys=mdlTerminate(t,x,u)
sys = [];
% end mdlTerminate

测试:
%%S函数实例 dx=u x0=0; u=sin(t)
%%参考:
function [sys,x0,str,ts,simStateCompliance] = mysfun_1(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
% end sfuntmpl
%=============================================================================
% flag=0时进行整个系统的初始化
%=============================================================================
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 1;%连续状态个数
sizes.NumDiscStates = 0;%离散状态格式
sizes.NumOutputs = 1;%输出变量个数
sizes.NumInputs = 1;%输入信号个数
sizes.DirFeedthrough = 0;%输入直接传入输出信号否
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = 0;%初始化
str = [];
ts = [0 0];%采样周期若写成-1表示继承其输入信号
simStateCompliance = 'UnknownSimState';
% end mdlInitializeSizes
%=============================================================================
% flag=1时进行连续系统状态的更新
%=============================================================================
function sys=mdlDerivatives(t,x,u)
x=u;
sys = x;
% end mdlDerivatives
%=============================================================================
% flag=2时进行离散系统状态的更新
%=============================================================================
function sys=mdlUpdate(t,x,u)
sys = [];
% end mdlUpdate
%=============================================================================
% flag=3时进行系统输出信号的求取
%=============================================================================
function sys=mdlOutputs(t,x,u)
sys = x;
% end mdlOutputs
%=============================================================================
% flag=4时进行下一刻仿真时间的计算
%=============================================================================
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 1; % Example, set the next hit to be one second later.
sys = t + sampleTime;
% end mdlGetTimeOfNextVarHit
%=============================================================================
% flag=9时进行终止仿真过程
%=============================================================================
function sys=mdlTerminate(t,x,u)
sys = [];
% end mdlTerminate
其他参考:
1)Simulink的扩展工具S-函数--http://wenku.baidu.com/link?url=Pk11Evhi-8NEVx6WCaxzRQJA1yjumNxBjWTS5s2NENHjE1sX16ljnJNv-7mkas5zE1e-T3HCI8ga1iGZy9CWddFXsYVzOOnDuVJmIPtQIRW
2)MATLAB的S-Function编写指导--http://wenku.baidu.com/link?url=-9wSWx-oLet8R51iXUbikEMWZF8DK4-n6AqoA5_fk3rtrh7hWWI9l3UFEMjVrY3WeP2WCRiRQXp7pfkTRsPVVa3j_82jDaKglxCmWvDxlvW
3)S-Function 使用及应用举例--http://wenku.baidu.com/link?url=HBjcwrzJvwZEE5X49yNXgukA-_RoLfBk-M6zVNDFmYpOa1htQoJWmywUPo9JPezJn4zie4svaWGjmEDSQmQnxHrHs961NBVKSP1K82yy8KC
4)MATLAB S函数编写示范(MATLAB2010a)——http://yjhou84.blog.163.com/blog/static/796606992010457313184/
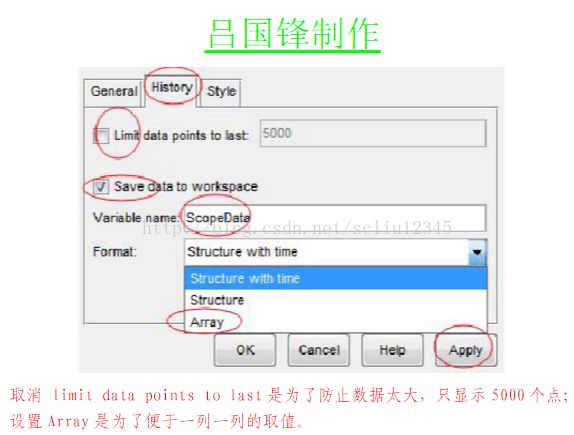
如何使用simulink示波器中的数据
(转自:https://wenku.baidu.com/view/134168dfdd88d0d233d46af0.html)
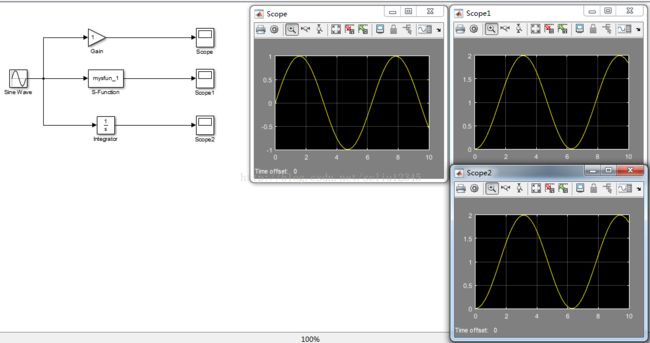
1、使用如图所示系统
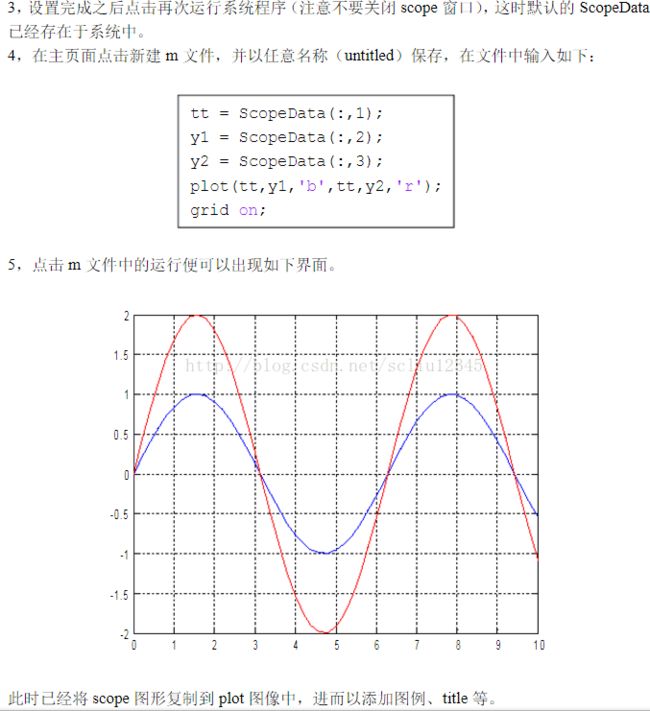
2、双击,打开Scope,并设置