Ubuntu14.04安装LSD-SLAM
Ubuntu14.04安装LSD-SLAM的过程、注意事项以及可能出现的错误:
LSD-SLAM官网:https://vision.in.tum.de/research/vslam/lsdslam
LSD-SLAM Github:https://github.com/tum-vision/lsd_slam
安装LSD-SLAM之前,必须先安装ROS indigo,可以参考:点击打开链接
1. 安装LSD-SLAM
1.1 创建rosbuild工作空间:
sudo apt-get install python-rosinstall
mkdir ~/rosbuild_ws
cd ~/rosbuild_ws
rosws init . /opt/ros/indigo
mkdir package_dir
rosws set ~/rosbuild_ws/package_dir -t .
echo "source ~/rosbuild_ws/setup.bash" >> ~/.bashrc
bash
cd package_dir1.2 安装依赖
sudo apt-get install ros-indigo-libg2o ros-indigo-cv-bridge liblapack-dev libblas-dev freeglut3-dev libqglviewer-dev libsuitesparse-dev libx11-dev1.3 获取LSD-SLAM
git clone https://github.com/tum-vision/lsd_slam.git lsd_slam1.4 编译
rosmake lsd_slam顾名思义,不应该在描述中出现引号(单引号或双引号),可以通过查看错误内容得知需要修改的文件名:
1) lsd_slam_viewer/cfg/LSDSLAMViewerParams.cfg
第20行scaledDepthVarTH:单词 point's和keyframe's 中出现了单引号,删除单引号
第21行absDepthVarTH:单词 point's
第24行cutFirstNKf:单词 keyframe's
2) lsd_slam_core/cfg/LSDDebugParams.cfg
第11行plotStereoImages:单词 what's
第12行plotTracking:单词 what's
第48行continuousPCOutput:单词 Keyfram's
修改上述文件并保存,重新编译:
rosmake lsd_slam2. 运行LSD-SLAM
2.1 采用live_slam模式,使用bag文件
1) 下载数据集并解压:Room Example Sequence
2) 打开Termial,输入以下命令:
roscore3) 打开新的Termial,输入以下命令,弹出PointCloud Viewer窗口:
rosrun lsd_slam_viewer viewer4) 打开新的Termial,输入以下命令:
rosrun lsd_slam_core live_slam image:=/image_raw camera_info:=/camera_info5) 打开新的Termial,输入以下命令,弹出DebugWindow DEPTH窗口并运行SLAM:
rosbag play dataset/LSD_room.bag2.2 采用dataset_slam模式,使用png图像文件和cfg校准文件
1) 下载数据集并解压:LSD_room(Desk Sequence)
2) 打开Termial,输入以下命令:
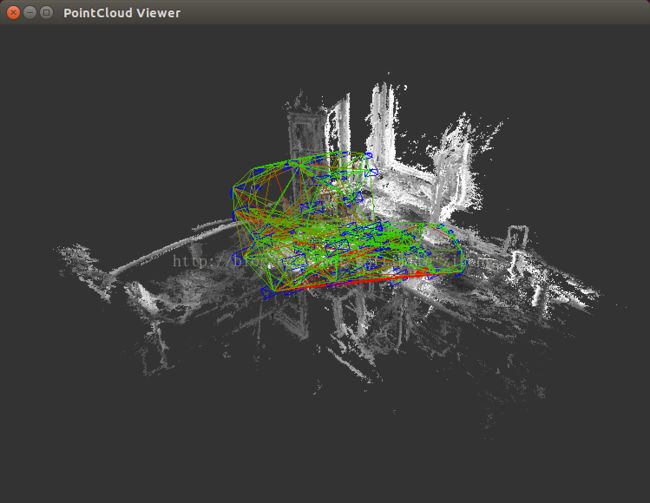
roscore3) 打开新的Termial,输入以下命令,弹出PointCloud Viewer窗口:
rosrun lsd_slam_viewer viewer4) 打开新的Termial,输入以下命令,弹出DebugWindow DEPTH窗口并运行SLAM:
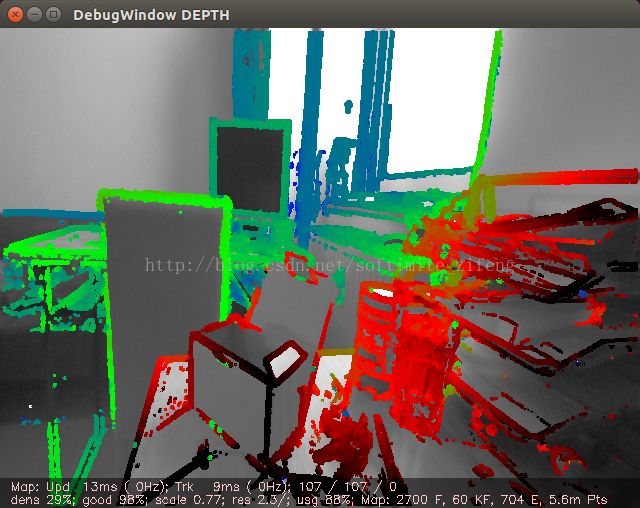
rosrun lsd_slam_core dataset_slam _files:=dataset/LSD_room/images _hz:=0 _calib:=dataset/LSD_room/cameraCalibration.cfg2.3 运行截图:
1) PointCloud Viewer
2) DebugWindow DEPTH