一、算术均值滤波器
1.1 原理:简单使用定义区域中的像素得出算术均值
1.2 公式

1.3 代码
#include
#include "pch.h"
#include
using namespace std;
using namespace cv;
/* Salt&pepper noise 椒盐噪声 */
void noise(Mat &image, float ratio) {
int n = image.rows * image.cols * ratio;
for (int k = 0; k < n; k++) {
int i = rand() % image.rows;
int j = rand() % image.cols;
int type = rand() % 2;
if (type == 1) {
image.at(i, j)[0] = 255;
image.at(i, j)[1] = 255;
image.at(i, j)[2] = 255;
}
else
{
image.at(i, j)[0] = 0;
image.at(i, j)[1] = 0;
image.at(i, j)[2] = 0;
}
}
}
/* Arithmetic mean filter 算术均值滤波器 */
double filterArithmeticMean(Mat src) {
double sum = 0;
for (int i = 0; i < src.rows; i++) {
uchar* data = src.ptr(i);
for (int j = 0; j < src.cols; j++) {
sum += double(data[j]);
}
}
return sum / double(src.cols*src.rows);
}
/* Filter 滤波器 */
Mat filter(Mat image, Size size) {
Mat result;
image.copyTo(result);
Mat channel[3];
split(image, channel);
int l = (size.height - 1) / 2;
int w = (size.width - 1) / 2;
for (int i = l; i < result.rows - l; i++) {
for (int j = w; j < result.cols - w; j++) {
for (int ii = 0; ii < 3; ii++) {
result.at(i, j)[ii] = saturate_cast(filterArithmeticMean(channel[ii](Rect(j - w, i - l, size.width, size.height))));
}
}
}
return result;
}
int main()
{
Mat img = imread("head.jpg");
// 噪声处理
noise(img, 0.1);
imshow("Noised", img);
// 滤波处理
Mat result = filter(img, Size(3, 3));
imshow("Denoised", result);
waitKey();
return 0;
}
1.4 效果
二、几何均值滤波器
2.1 原理:每个复原的像素由子图像窗口中像素数的乘积的1/mn次幂给出
2.2 公式
2.3 代码
#include
#include "pch.h"
#include
using namespace std;
using namespace cv;
/* Salt&pepper noise 椒盐噪声 */
void noise(Mat &image, float ratio) {
int n = image.rows * image.cols * ratio;
for (int k = 0; k < n; k++) {
int i = rand() % image.rows;
int j = rand() % image.cols;
int type = rand() % 2;
if (type == 1) {
image.at(i, j)[0] = 255;
image.at(i, j)[1] = 255;
image.at(i, j)[2] = 255;
}
else
{
image.at(i, j)[0] = 0;
image.at(i, j)[1] = 0;
image.at(i, j)[2] = 0;
}
}
}
/* Geometric mean filtering 几何均值滤波器 */
double filterGeometricMean(Mat src) {
double geo = 1;
for (int i = 0; i < src.rows; i++) {
uchar* data = src.ptr(i);
for (int j = 0; j < src.cols; j++) {
if (data[j] != 0)
geo *= data[j];
}
}
double power = 1.0 / double(src.rows*src.cols);
return pow(geo, power);
}
/* Filter 滤波器 */
Mat filter(Mat image, Size size) {
Mat result;
image.copyTo(result);
Mat channel[3];
split(image, channel);
int l = (size.height - 1) / 2;
int w = (size.width - 1) / 2;
for (int i = l; i < result.rows - l; i++) {
for (int j = w; j < result.cols - w; j++) {
for (int ii = 0; ii < 3; ii++) {
result.at(i, j)[ii] = saturate_cast(filterGeometricMean(channel[ii](Rect(j - w, i - l, size.width, size.height))));
}
}
}
return result;
}
int main()
{
Mat img = imread("input.jpg");
// 噪声处理
noise(img, 0.01);
imshow("Noised", img);
// 滤波处理
Mat result = filter(img, Size(3, 3));
imshow("Denoised", result);
waitKey();
return 0;
}
2.4 效果
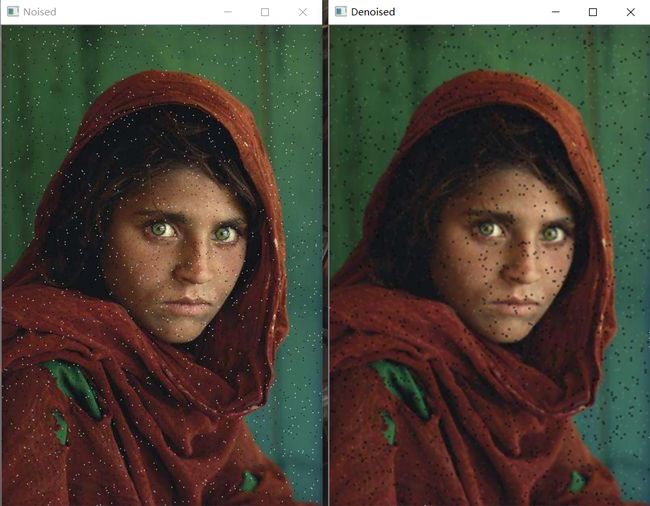
三、谐波均值滤波器
3.1 原理:谐波均值滤波器对于盐粒噪声效果较好,但不适用于胡椒噪声
3.2 公式
3.3 代码
#include
#include "pch.h"
#include
using namespace std;
using namespace cv;
/* Salt&pepper noise 椒盐噪声 */
void noise(Mat &image, float ratio) {
int n = image.rows * image.cols * ratio;
for (int k = 0; k < n; k++) {
int i = rand() % image.rows;
int j = rand() % image.cols;
int type = rand() % 2;
if (type == 1) {
image.at(i, j)[0] = 255;
image.at(i, j)[1] = 255;
image.at(i, j)[2] = 255;
}
else
{
image.at(i, j)[0] = 0;
image.at(i, j)[1] = 0;
image.at(i, j)[2] = 0;
}
}
}
/* Harmonic mean filter 谐波均值滤波器 */
double filterHarmonicMean(Mat src) {
double harmonic = 0;
for (int i = 0; i < src.rows; i++) {
uchar* data = src.ptr(i);
for (int j = 0; j < src.cols; j++) {
if (data[j] != 0)
harmonic += 1 / (double)data[j];
}
}
return (src.rows*src.cols) / harmonic;
}
/* Filter 滤波器 */
Mat filter(Mat image, Size size) {
Mat result;
image.copyTo(result);
Mat channel[3];
split(image, channel);
int l = (size.height - 1) / 2;
int w = (size.width - 1) / 2;
for (int i = l; i < result.rows - l; i++) {
for (int j = w; j < result.cols - w; j++) {
for (int ii = 0; ii < 3; ii++) {
result.at(i, j)[ii] = saturate_cast(filterHarmonicMean(channel[ii](Rect(j - w, i - l, size.width, size.height))));
}
}
}
return result;
}
int main()
{
Mat img = imread("input.jpg");
// 噪声处理
noise(img, 0.01);
imshow("Noised", img);
// 滤波处理
Mat result = filter(img, Size(3, 3));
imshow("Denoised", result);
waitKey();
return 0;
}
3.4 效果
四、中值滤波器
4.1 原理:使用一个像素领域中的灰度级的中值来替代该像素的值
4.2 公式

4.3 代码
#include
#include "pch.h"
#include
using namespace std;
using namespace cv;
/* Salt&pepper noise 椒盐噪声 */
void noise(Mat &image, float ratio) {
int n = image.rows * image.cols * ratio;
for (int k = 0; k < n; k++) {
int i = rand() % image.rows;
int j = rand() % image.cols;
int type = rand() % 2;
if (type == 1) {
image.at(i, j)[0] = 255;
image.at(i, j)[1] = 255;
image.at(i, j)[2] = 255;
}
else
{
image.at(i, j)[0] = 0;
image.at(i, j)[1] = 0;
image.at(i, j)[2] = 0;
}
}
}
/* Bubble sort 冒泡排序 */
void bubbleSort(float* pData, int count) {
float tData;
for (int i = 1; i < count; i++) {
for (int j = count - 1; j > -i; j--) {
if (pData[j] < pData[j - 1]) {
tData = pData[j - 1];
pData[j - 1] = pData[j];
pData[j] = tData;
}
}
}
}
/* Median filter 中值滤波器 */
double filterMedian(Mat src) {
int index = 0;
int length = src.rows * src.cols;
float* bubble = new float[length];
for (int i = 0; i < src.rows; i++) {
uchar* data = src.ptr(i);
for (int j = 0; j < src.cols; j++) {
bubble[index] = data[j];
index++;
}
}
bubbleSort(bubble, length);
double median = bubble[length / 2];
return median;
}
/* Filter 滤波器 */
Mat filter(Mat image, Size size) {
Mat result;
image.copyTo(result);
Mat channel[3];
split(image, channel);
int l = (size.height - 1) / 2;
int w = (size.width - 1) / 2;
for (int i = l; i < result.rows - l; i++) {
for (int j = w; j < result.cols - w; j++) {
for (int ii = 0; ii < 3; ii++) {
result.at(i, j)[ii] = saturate_cast(filterMedian(channel[ii](Rect(j - w, i - l, size.width, size.height))));
}
}
}
return result;
}
int main()
{
Mat img = imread("input.jpg");
// 噪声处理
noise(img, 0.01);
imshow("Noised", img);
// 滤波处理
Mat result = filter(img, Size(3, 3));
imshow("Denoised", result);
waitKey();
return 0;
}
4.4 效果
参考链接:https://blog.csdn.net/wzmsltw/article/details/52927787