迭代最邻近匹配算法(icp)及三维人脸匹配实例
不好意思,太久没上没有回复各位。这个小实验的demo已上传至
http://download.csdn.net/download/u011772859/10224072,不包含显示程序。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
概述:3dIcp算法由Paul J.Besl1992年提出。它的基础是对应点集匹配算法。对应点匹配的思想是:通过对点集的旋转、平移使得两点集的误差平方和最小。在两个点集并未一一对应时,icp算法采用“距离最近的点”为标准为库集中每一个点匹配一个对应点。当对象点数很多时,匹配过程的时间代价占据了主导地位。目前各种对icp的改进方法很多是在点集配对上做文章。
2d对应点匹配算法:
点集中的每个元素为二维点(xi,yi),点集A在B上的对应点集为A’,共有N个元素。一次迭代逼近由旋转矩阵、平移矩阵构成,作用在测试集B上Theta是旋转角度,x,y是要平移的量。
[cos(theta) sin(theta) x
-sin(theta) cos(theta) y
0 0 1]
也可以直接构造二维矩阵R
[cos(theta) sin(theta)
-sin(theta) cos(theta)] (1)
A’R=A (2)
最小二乘法原则构造目标函数E=sum[(Xa-Xa')^2+(Ya-Ya')^2] (3)
将(1)(2)带入(3)中,得到E(theta)表达式,对theta求导令之为0,可求的theta的表达式:
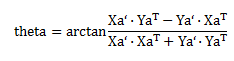
求得theta后得到旋转矩阵R,旋转后再将两点集的质心平移到一起即可。
3d对应匹配算法
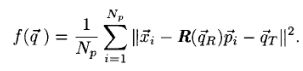
采用四元数向量qR表示旋转,qT表示平移,

完整的匹配向量为
![]()
算法过程
1.用最近距离或其他方法从要匹配的两个点集X’,P’中确定对应点集X 和P, X={xi}, P={pi},i=1,2,…Np
目标函数:
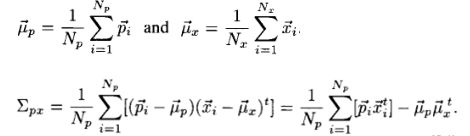
2.对X和P求出去重心化后的互协方差矩阵
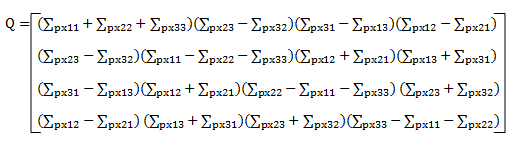
3.构建4*4正定阵Q
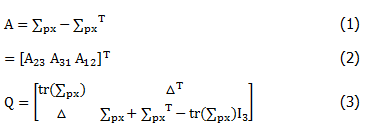
将(1) (2)带入(3)中,得到
4.构建旋转矩阵R
对Q进行特征值分解,取最大特征值对应的特征向量作为qr=[q0q1q2q3]T
构造旋转矩阵R

在对P集R变换后再做重心平移即可。
5计算误差函数,是否达到某一阈值,否则回到1。
matlab代码及关键函数供参考:
datag=load('F:\face1.asc');
datap=load('F:\face2.asc');
datap=rotateup(20,datap);
Write3dData('F:\face3.txt',datap);
[datag,datap1,error] = ICP3d(datag,datap);
err=mean(error(:,1));
lasterror=0;
k=0;
while abs(err-lasterror)>0.01
k=k+1;
lasterror=err;
[datag,datap,error] = ICP3d(datag,datap);
err=mean(error(:,1));
end %icp匹配
Write3dData('F:\1.txt',datag);
Write3dData('F:\2.txt',datap); function [datag1,datap1,error] = ICP3d(datag,datap)
%ICP3d datag--Gallery data datap--Probe data
%error--mean square error vector
[k1,n]=size(datag);
[k2,m]=size(datap);
data1=zeros(k1,3);%中间点集
datapp=zeros(k1,3);%对应点集
distance=zeros(k1,1);
error=zeros(k1,1);%对应点之间误差点集
for i=1:1:k1
datap1(:,1)=datap(:,1)-datag(i,1);
datap1(:,2)=datap(:,2)-datag(i,2);
datap1(:,3)=datap(:,3)-datag(i,3);
distance=datap1(:,1).^2+datap1(:,2).^2+datap1(:,3).^2;
[mi,minindex]=min(distance);
datapp(i,:)=datap(minindex,:);
error(i)=mi;
end %用最近距离找对应点
[datag]=normalGravity(datag);
[datapp]=normalGravity(datapp);%去重心化
V=(datag'*datapp)./k1;%协方差矩阵
matrix4 = [V(1,1)+V(2,2)+V(3,3),V(2,3)-V(3,2),V(3,1)-V(1,3),V(1,2)-V(2,1);
V(2,3)-V(3,2),V(1,1)-V(2,2)-V(3,3),V(1,2)+V(2,1),V(1,3)+V(3,1);
V(3,1)-V(1,3),V(1,2)+V(2,1),V(2,2)-V(1,1)-V(3,3),V(2,3)+V(3,2);
V(1,2)-V(2,1),V(1,3)+V(3,1),V(2,3)+V(3,2),V(3,3)-V(1,1)-V(2,2)];
%对称阵
[V2,D2] =eig(matrix4);
a=[D2(1,1),D2(2,2),D2(3,3),D2(4,4)];
[x,n]=max(a);
Q=V2(:,n); %最大特征值对应的向量
R=[Q(1,1)^2+Q(2,1)^2-Q(3,1)^2-Q(4,1)^2, 2*(Q(2,1)*Q(3,1)-Q(1,1)*Q(4,1)), 2*(Q(2,1)*Q(4,1)+Q(1,1)*Q(3,1));
2*(Q(2,1)*Q(3,1)+Q(1,1)*Q(4,1)), Q(1,1)^2-Q(2,1)^2+Q(3,1)^2-Q(4,1)^2, 2*(Q(3,1)*Q(4,1)-Q(1,1)*Q(2,1));
2*(Q(2,1)*Q(4,1)-Q(1,1)*Q(3,1)), 2*(Q(3,1)*Q(4,1)+Q(1,1)*Q(2,1)), Q(1,1)^2-Q(2,1)^2-Q(3,1)^2-Q(4,1)^2;
]; %旋转矩阵
datap=datap*R;
[datap1]=normalGravity(datap);%质心移到一起
[datag1]=normalGravity(datag);
end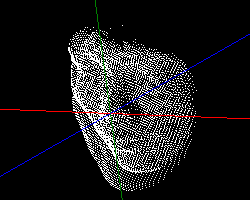 err=156.1272
err=156.1272
1&2
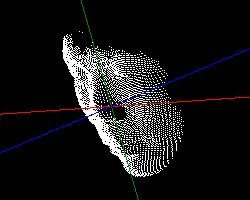 err=1.8852
err=1.8852