三相异步电机基于模型的效率估计算法
文章目录
- 一、引言
- 二、感应电机功率流程
- 三、原理概述
- 3.1 电机模型参数的求解
- 3.1.1 基于求解器求解
- 3.1.2 基于非线性方程组求解
- 3.2 估计转差率和机械角速度
- 四、方案实现
- 五、方案论证
- 六、适用范围
一、引言
三相异步电机在工业自动化中应用非常多,如果因为电机故障导致自动化生产线停产,会造成巨大的经济损失,所以在日常维护时对电机进行检测非常有必要。为了尽量减少停工时间,最好的方式是对电机进行不停机检测。通常异步电机的故障是由于长时间运行损耗增加、效率降低,所以电机检测比较重要的一项是检测效率。一般情况会有专用测试仪器来检测电机效率,但是都需要拆下电机,安装到专用仪器上进行测试。本文提出了一种基于模型的效率估计算法,用于在正常工况不停机的情况下检测电机效率。
二、感应电机功率流程
感应电机的功率流程图如下图所示:
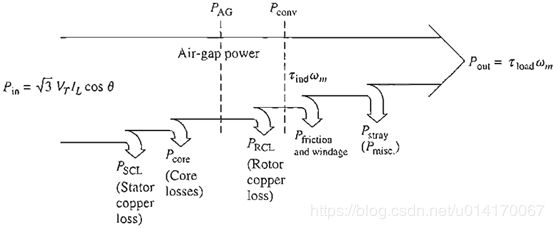
电机的效率:

Pout里面包含机械损耗功率Pf&w、Pmisc 和由电能转换而来的机械功率Pconv。Pin表示输入的电功率,可以通过直接测量的到。而在正常工况、不停机的情况下,无法直接测量Pout和机械损耗功率。使用基于模型的算法可以估算感应转矩τind和机械角速度wm,进而估算出转换功率:
![]()
所以估算出的效率也是电能转换成机械能的转换效率:
也就是需要估算出转换功率Pconv,即需要估算出感应转矩τind和机械转速wm。
三、原理概述
三相异步电动机的Double-Cage等效电路模型如下图所示:

其中,Vs、Is分别是相电压和相电流,s是转差率。需要确定七个参数才能唯一确定该模型。Rs、Xsd表示定子绕组的阻抗和电抗,Xm表示漏感电抗,R1、X1d、R2、X2d分别表示转子绕组内笼和外笼的阻抗和电抗。如果已知这七个参数就可以通过下式估计电机转矩:
公式略 (4)
由上式可以看出,当电机型号确定之后,表示电机模型的七个参数也是个定值,所以电机转矩只与转差率有关,如果对转差率的估计不准确,就会直接导致转矩估计的误差。通过上式还可以画出电机的转矩-转速机械特性曲线。以型号为Y90L-2的电机为例,其转矩-转速特性曲线如下图(上)所示。于是估计转矩的方法可以理解成,找到一条可以描述实际电机转矩-转速特性的曲线,即确定上图所示模型中的七个参数。

然而虽然通过上式可以估算电机转矩,但还有两个问题需要解决,首先是如何得到上图所示的模型中的七个参数?其次是怎么得到准确的转差率?
3.1 电机模型参数的求解
如何根据标准的电机参数求解上图所示的模型参数的方法有两种:
- 利用Matlab的异步电机参数求解器进行求解;
- 根据电机的非线性方程求解。
3.1.1 基于求解器求解
以型号为Y90L-2的电机为例,在Matlab的异步电机求解器中求解的结果如下图所示:

图中左半部分为需要输入的电机参数,右半部分为计算得到的电机模型参数。
需要输入的参数由上到下依次如下表所示:

这些参数都可以在国标电机参数表(见第6节)中直接或间接得到。例如额定转矩可以通过下式得到:
公式略
求解器右半部分为计算得到的电机模型参数,由上到下依次为:
额定功率、电压和频率:[2201 380 50]
定子阻抗和电感[Rs(ohm) Lls(H)]:[5.825 0.003262]
笼1阻抗和电感[Rr1(ohm) Llr1(H)]:[4.938 0.003316]
笼2阻抗和电感[Rr2(ohm) Llr2(H)]:[4.969 0.003262]
互感Lm(H):0.2396
这些参数与电机模型七个参数之间的对应关系为:
公式略
由以上关系可知,对于型号为Y90L-2的电机,可以通过上图所示的求解器求出器模型参数。对于部分国标电机的求解结果如下表所示:

将这些值存储起来,在估算电机转矩时可以当作常量使用。
在得到了七个参数的值之后,要想使用式(4)估算电机转矩还需要计算两个参数R2和X2的值。其计算方法如式(10)和式(11)所示。式(4)中VTH、RTH和XTH的计算方法如式(7)~(9)所示。
得到了七个参数及R2、X2的值之后,就可以按照式(4),根据电机转差率s估算电机的转矩。当然,转差率s也是未知的,也需要估算,关于转差率的估算方法将在后面给出。
3.1.2 基于非线性方程组求解
上一小节中的方法流程是首先在Matlab中求解出各型号电机的模型参数,并存储起来,根据用户选择的电机型号调用这些参数。这样做的优点是Matlab对于电机模型参数的计算精度比较高,估算得到的电机转矩误差相对较小。然而,不可能将所有型号的电机都包含进来,例如型号为Y2VP90S-6的变频调速异步电机,其铭牌参数与相同规格的普通异步电机有一些不同,这时需要用户手动输入电机的铭牌参数(要求输入的参数与表1相同,如果有部分参数值不确定,则会增大转矩估计误差),然后通过某种方法计算出七个模型参数的值。
如何通过电机铭牌参数(即表1所示的输入参数)求解电机模型参数就是本节要讨论的问题。
用来求解七个电机参数模型的非线性方程组为:
公式略 (5)
具体如何从非线性方程中求解出电机模型参数,略。
3.2 估计转差率和机械角速度
如果基于式(4)进行电机的转矩估计,那么转差率的准确度对转矩估计的结果影响很大。对于估计转差率的方法,目前已知的有两种,一种是Fluck专利中的对定子电流进行频谱分析,根据频移来估计转差率。该方法在实际和仿真中并没有什么效果;另一种是根据槽谐波估计转差率,但是这种方法需要知道电机的齿数,一般电机的齿数不会出现在电机铭牌或标准文件中,所以电机的齿数一般很难得到。
这里用的估计转差率的方法也基于上述电机模型。可以在电机特性曲线(下)中看出,定子电流 (有效值)与电机转速之间具有函数关系。所以只要确定了电机的电流-转速特性就可以通过测量定子电流求出转速,进而求出转差率。
可以通过3.1节中的电机模型求出定子电流与转差率s之间的函数关系:
公式略 (29)
根据实时检测到的电压和电流有效值,就可以通过方程(29)求解出对应的转差率。这个方程同样需要用数值方法才能解出,将额定转差率作为其初始值,采用最小二乘等数值解法求解出转差率。
有了转差率之后,就可以根据同步转速求出机械转速和机械角速度。
四、方案实现
下图所示为本文提出的估计电机效率算法的流程图:
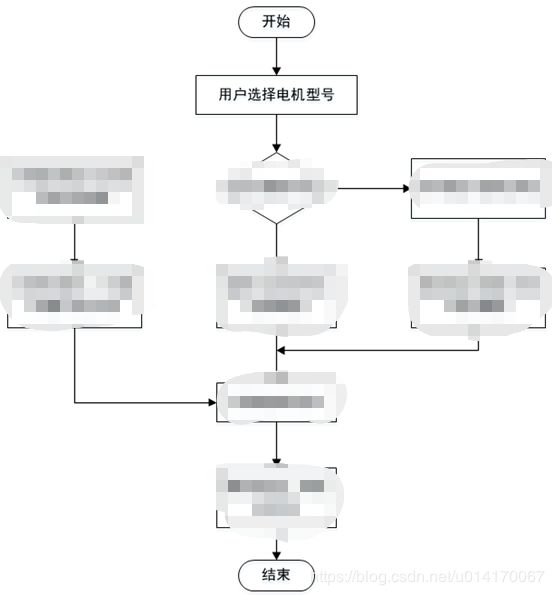
由于本算法完全基于电机模型进行转矩估计,理论上来说,对于国标规定的特定型号的电机模型是相同的,但是,首先不同电机制造商生产的电机在硬件上有所差异,其次有些电机并没有精确按照国标参数设计电机,所以使用这种基于模型的转矩估计算法可能在不同的电机上估计精度不同。
五、方案论证
使用3.1.1节得到的电机模型,假定电机工作在额定状态,即定子线电压为额定电压、线电流为额定电流时计算电机转矩并于额定转矩进行比较。
以Y90L-2电机为例。当电机工作与额定状态时作如下假设:
- 假设实际线电压等于额定电压,实际电流等于额定电流。
- 假设实际输出转矩等于额定转矩,实际转速等于额定转速。
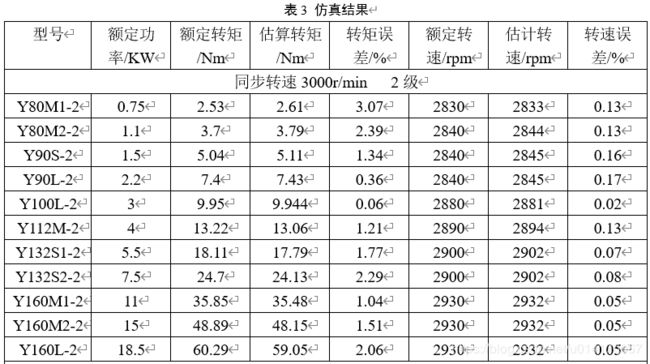
由此估算得到的转速为:2845rpm,估算得到的转矩为:7.43Nm,估算得到的效率为:81.5%。转速估算误差为:0.17%,转矩估算误差为:0.36%。
对部分Y系列三相异步电机进行仿真的结果如表3所示,该仿真结果是基于以上两点假设得到的。这种转矩估计算法的效果还需要进行实际验证。
六、适用范围
本转矩估计算法主要用于符合国标规定的Y系列三相异步电动机,详细参数如表4所示:

说明:文中关键公式、求解过程、图表都做了保密处理,知识来之不易,请理解。