最近几天学习了好多opencv里有关轮廓查找与绘制的函数,想做一下整理,把所有学的函数列出来,以便于统一思考一下,怎样充分的运用它们做一些自己想做的事情。就比如我最近参加一个比赛,负责做我们项目里的动作行为识别,轮廓识别就是首当其冲的一个研究点。
今天把它们列在这里,也希望可以帮到各位博客友人,以便于思考解决你们想做的事情。
1、什么是轮廓?
轮廓可以简单认为成将连续的点(连着边界)连在一起的曲线,具有相同的颜色或者灰度,提取轮廓就是提取这些具有相同颜色或者灰度的曲线,或者说是连通域,轮廓在形状分析和物体的检测和识别中非常有用。
注意事项:
①为了更加准确,要使用二值化图像。在寻找轮廓之前,要进行阈值化处理
或者 Canny 边界检测
②查找轮廓的函数会修改原始图像。如果你在找到轮廓之后还想使用原始图
像的话,你应该将原始图像存储到其他变量中(clone(), copyTo())
③在OpenCV中,查找轮廓就像在黑色背景中找白色物体。你应该记住,
要找的物体应该是白色而背景应该是黑色。
2、开始上函数!
(1)查找轮廓---findContours()

image:
输入图像
, Mat
类型
8
位单通道图像
(
一般为二值图
)
contours:
检测到的轮廓
,
每个轮廓存储为一个点向量
,
即
Point
类型的
vector
表示
hierarchy
:
可选的输出向量
,
包含图像的拓扑信息。其作为轮廓数量的表示
,
包含了许多元素
,
每个轮廓
contours[
i
]
对应
4
个
hierarchy
元素
hierarchy[
i
][0]~
hierarchy[
i
][3],
分别表示后一轮廓、前一轮廓、父轮廓、内嵌轮廓的索引编号
,
如果没有对应项
,
设置为负数
mode:
轮廓检索模式
,
取值如下
:
CV_RETR_EXTERNAL=0-----表示只检测最外层轮廓
CV_RETR_LIST=1------提取所有轮廓并放置在list中, 轮廓不建立等级关系
CV_RETR_CCOMP=2------提取所有轮廓并组织为双层结构
CV_RETR_TREE=3------提取所有轮廓并重新建立网状轮廓结构
method:
轮廓的近似方法
o
ffset:
每个轮廓的可选偏移量
,
默认值
Point()
例子:

(2)绘制轮廓---drawContours()

image:
目标图像
, Mat
类型对象即可
contours:
所有的输入轮廓
,
每个轮廓存储为一个点向量
contourIdx
:
轮廓绘制指示变量
(
索引
),
若为负值
,
则表示绘制所有轮廓
color
:
绘制轮廓的颜色
thickness
:
轮廓线条的粗细
,
默认值
1,
如果为负值
,
则绘制轮廓内部
,
可选宏
CV_FILLED
lineType
:
线条类型
,
默认值
8
h
ierarcy
:
可选的层次结构信息
,
默认值
noArray
()
maxLevel
:
表示用于绘制轮廓的最大等级
,
默认值
INT_MAX
o
ffset:
可选的轮廓偏移参数
,
默认值
Point()
例子:

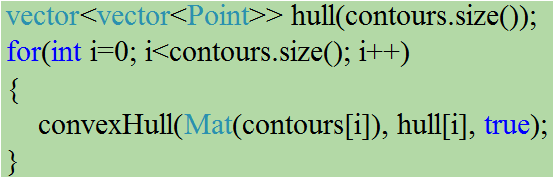
(3)寻找凸包---convexHull()

points:
输入的二维点集
,
可以填
Mat
类型或
std
::vector
hull:
函数调用后找到的凸包
clockwise:
操作方向标志符
,
当为
true
时
,
输出的凸包为顺时针方向
, false
为逆时针方向
(
假定坐标系
x
轴指向右,
y
轴指向上方
)
returnPoints
:
操作标志符
,
默认值
true.
当标志符为
true
时
,
函数返回凸包各个点
,
否则返回凸包各点的指数
,
当输出数组是
std
::vector
时
,
此标志被忽略
例子1:
例子2:
(4)凸包缺陷分析---convexityDefects()

contour:
表示输入参数检测到的轮廓
,
可以用
findContours
函数获得
convexhull
:
输入参数表示检测到的凸包
,
可以用
convexHull
函数获得
convexityDefects
:
检测到的最终结果
,
应为
vector>
类型
, Vec4i
存储了起始点、结束点、距离及最远点到凸包的距离
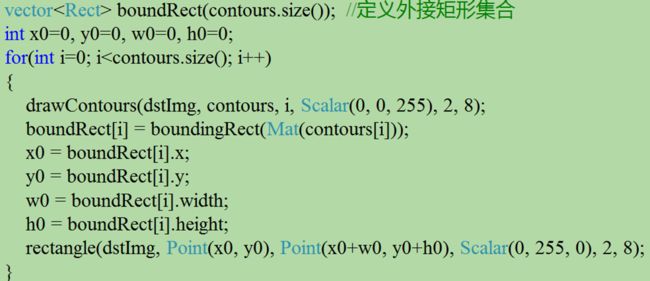
(5)轮廓外接矩形---boundingRect()

points:
输入的二维点集
,
可以填
Mat
类型或
std
::vector
返回
值
:
Rect
类矩形对象
例子:
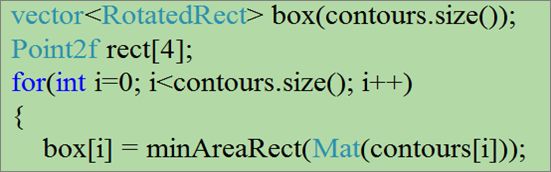
(6)轮廓最小外接矩形---minAreaRect()

points:
输入的二维点集
,
可以填
Mat
类型或
std
::vector
返回
值
:
RotatedRect
类矩形对象
,
外接旋转矩形主要成员有
center
、
size
、
angle
、
points
例子:
(7)轮廓最小外接圆---minEnclosingCircle()

points:
输入的二维点集
,
可以填
Mat
类型或
std
::vector
c
enter: Point2f&
类型的
center,
圆的输出圆心
r
adius: float&
类型
,
表示圆的输出半径
(8)轮廓椭圆拟合---fitEllipse()

points:
输入的二维点集
,
可以填
Mat
类型或
std
::vector
返回值: RotatedRect类旋转矩形对象
(9)逼近多边形曲线---approxPolyDP()

curve:
输入的二维点集
,
可以填
Mat
类型或
std
::vector
approxCurve
:
多边形逼近的结果
,
其类型和输入二维点集类型一致
e
psilon:
逼近的精度
,
为原始曲线和近似曲线间的最大值
c
losed:
如果其为真
,
则近似的曲线为封闭曲线
,
否则近似的曲线不封闭
(10)计算轮廓面积---contourArea()

contour:
输入的二维点集或轮廓
,
可以填
Mat
类型或
std
::vector
oriented:
默认值
false,
表示返回面积为绝对值
,
负责带符号
返回值
: double
类型返回轮廓面积
(11)计算轮廓长度---arcLength()

curve:
输入的二维点集
,
可以填
Mat
类型或
std
::vector
colsed
:
用于指示曲线是否封闭的标识符
,
默认值
true,
表示曲线封闭
返回值
: double
类型返回轮廓长度
(12)计算点与轮廓的距离及位置关系---pointPolygonTest()

contour:
所需检测的轮廓对象
pt
: Point2f
类型的
pt
,
待判定位置的点
measureDist
:
是否计算距离的标志
,
当其为
true
时
,
计算点到轮廓的最短距离
,
当其为
false
时
,
只判定轮廓与点的位置关系
,
具体关系如下
:
①返回值为-1, 表示点在轮廓外部
②返回值为0, 表示点在轮廓上
③返回值为1, 表示点在轮廓内部
例子:

(13)矩的计算---moments()

array:
输入参数
,
可以是光栅图像或二维数组
binaryImage
:
默认值
false,
非零像素取其本身值
,
若为
true,
则非零像素取
1
返回
值
: Moments
类的对象
,
返回对应的轮廓的空间矩
/
中心矩和归一化中心矩
(
最高
3
阶
)
例子:
(14)形状匹配---matchShapes()

contour1:
所需比较的轮廓
1
contour2:
所需比较的轮廓
2
method:
轮廓比较的方法
p
arameter:
比较方法的特殊参数
(
目前不支持
)
(15)颜色空间转换---cvtColor()

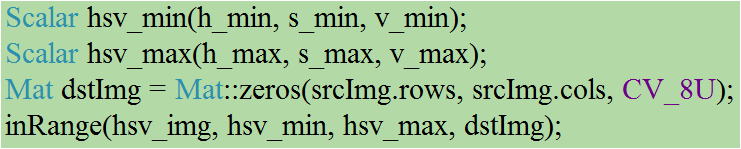
(16)颜色区间范围删选---inRange()

src
:
输入原图或数组
lowerb
:
低边界或者颜色阈值
upperb
:
高边界或者颜色阈值
dst
:
输出目标图像
,
需要和原图一样的
size
并且类型需为
CV_8U
例子: