Opencv 轮廓提取
边缘检测的一般步骤
- 滤波——消除噪声
- 增强——使边界轮廓更加明显
- 检测——选出边缘点

方法一
Canny算法
特点:轮廓细腻
#include
#include
using namespace std;
using namespace cv;
//边缘检测
int main()
{
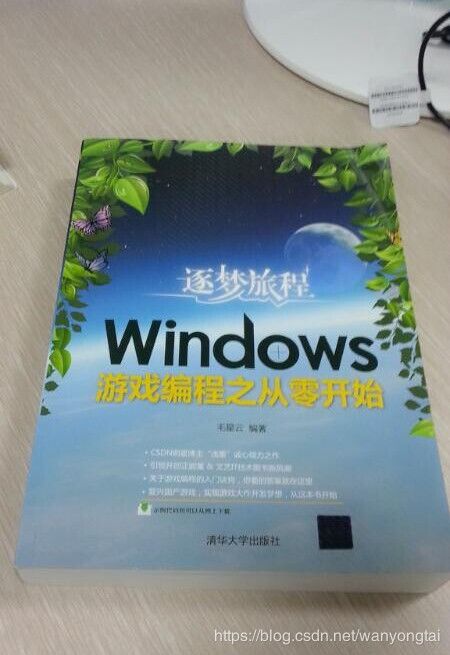
Mat img = imread("1.jpg");
imshow("原始图", img);
Mat DstPic, edge, grayImage;
//创建与src同类型和同大小的矩阵
DstPic.create(img.size(), img.type());
//将原始图转化为灰度图
cvtColor(img, grayImage, COLOR_BGR2GRAY);
//先使用3*3内核来降噪
blur(grayImage, edge, Size(3, 3));
//运行canny算子
Canny(edge, edge, 3, 9, 3);
imshow("Canny算法轮廓提取效果", edge);
waitKey(0);
}

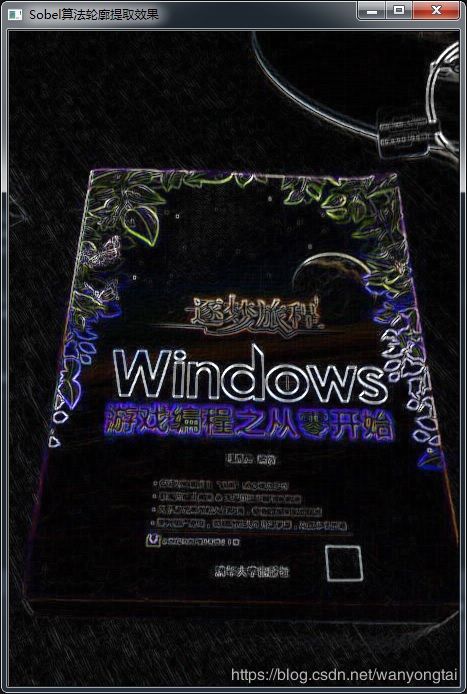
方法二
Sobel算法
#include
#include
using namespace std;
using namespace cv;
//边缘检测
int main()
{
Mat img = imread("1.jpg");
imshow("原始图", img);
Mat grad_x, grad_y;
Mat abs_grad_x, abs_grad_y, dst;
//求x方向梯度
Sobel(img, grad_x, CV_16S, 1, 0, 3, 1, 1, BORDER_DEFAULT);
convertScaleAbs(grad_x, abs_grad_x);
imshow("x方向soble", abs_grad_x);
//求y方向梯度
Sobel(img, grad_y, CV_16S, 0, 1, 3, 1, 1, BORDER_DEFAULT);
convertScaleAbs(grad_y, abs_grad_y);
imshow("y向soble", abs_grad_y);
//合并梯度
addWeighted(abs_grad_x, 0.5, abs_grad_y, 0.5, 0, dst);
imshow("Sobel算法轮廓提取效果", dst);
waitKey(0);
}
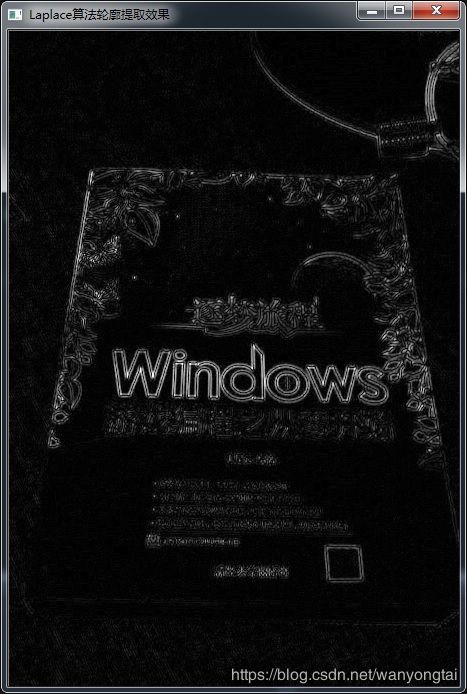
方法三
Laplacian算法
#include
#include
using namespace std;
using namespace cv;
//边缘检测
int main()
{
Mat img = imread("1.jpg");
imshow("原始图", img);
Mat gray, dst, abs_dst;
//高斯滤波消除噪声
GaussianBlur(img, img, Size(3, 3), 0, 0, BORDER_DEFAULT);
//转换为灰度图
cvtColor(img, gray, COLOR_RGB2GRAY);
//使用Laplace函数
//第三个参数:目标图像深度;第四个参数:滤波器孔径尺寸;第五个参数:比例因子;第六个参数:表示结果存入目标图
Laplacian(gray, dst, CV_16S, 3, 1, 0, BORDER_DEFAULT);
//计算绝对值,并将结果转为8位
convertScaleAbs(dst, abs_dst);
imshow("Laplace算法轮廓提取效果", abs_dst);
waitKey(0);
}