MPC5748G UART uart_pal
文章目录
- 前言
- UART简介
- 新建工程
- PE配置
- 补全代码
- 微信公众号
前言
MPC5748G开发环境搭建
MPC5748G S32_SDK_PA_RTM_3.0.0 GPIO 调试仿真设置
MPC5748G SDK 定时器 timing_pal
前三篇讲了开发环境的搭建, GPIO的读写操作, 调试仿真的设置, 定时器的使用等, 本篇介绍下串口.
UART简介
MPC5748G并没有专门的叫UART的东西, 使用LINFlexD这个组件兼任的, 多达18个, 很是生猛:

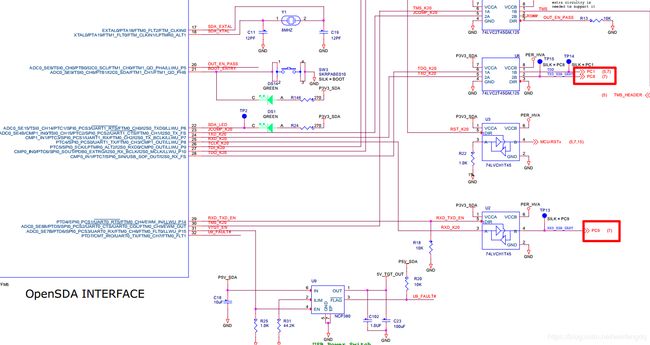
以DEVKIT-MPC5748G为例, 板子上的PC8, PC9(LINFlexD)连接到OpenSDA的虚拟串口, 正好用OpenSDA的USB口就可以和这个串口通信:
新建工程
步骤如下:
- 打开S32, File -> New -> S32DS Application Project
- 选择MCU: MPC5748G, 填入工程名
- 默认3个核都勾上了, 这里去掉Z4_1和Z2_2的勾选, 只保留Z4_0, 选择SDK: MPC5748G_SDK_Z4_0 3.0.0, 点击Finish结束.
PE配置
LINFlexD设置:

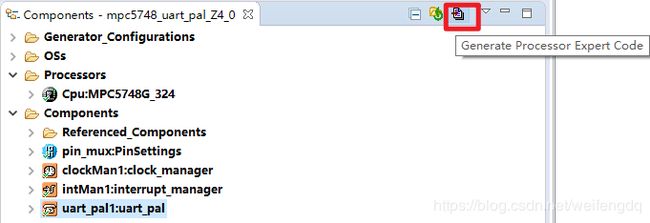
Components Library中双击添加uart_pal:

对uart_pal1进行配置, 选择LINFlexD_2, 波特率随手写个1.5Mbps, 接收的函数名字随便写:

点击生成代码:
补全代码
直接把官方uart_pal的例程的一部分搞过来看:
/* Including necessary module. Cpu.h contains other modules needed for compiling.*/
#include "Cpu.h"
volatile int exit_code = 0;
/* User includes (#include below this line is not maintained by Processor Expert) */
#include 调试运行, 打开sscoom:

符合预期, 这个丢字节真的是…
printf的用法参考: 浅谈嵌入式软件开发之重定向标准输入输出设备使用printf()函数格式化输出调试信息(基于S32DS IDE和MPC5744P), 没试过.
微信公众号
欢迎扫描关注我的微信公众号, 及时获取最新文章:
