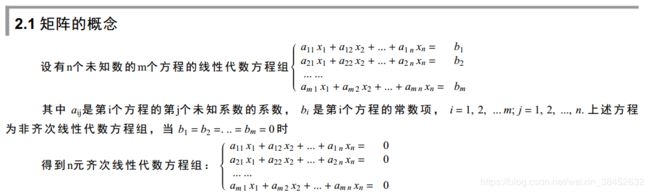
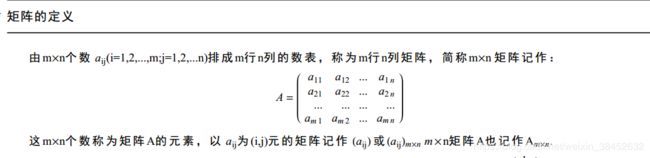
Python之线性代数(矩阵运算,逆矩阵,伴随矩阵)




np.eye(10)*10
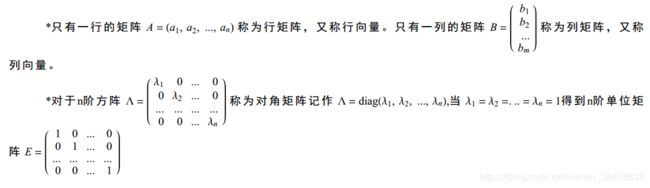
# 10阶方阵,当对角线值为1时为对角矩阵
np.eye(5)array([[1., 0., 0., 0., 0.],
[0., 1., 0., 0., 0.],
[0., 0., 1., 0., 0.],
[0., 0., 0., 1., 0.],
[0., 0., 0., 0., 1.]])
a = np.arange(10)
print(a)
print(a.shape)
# 行向量
a = np.arange(10).reshape(10,1)
print(a)
print(a.shape)
# 列向量[0 1 2 3 4 5 6 7 8 9] (10,)
[[0] [1] [2] [3] [4] [5] [6] [7] [8] [9]] (10, 1)
ar1 = np.arange(12).reshape(3,4)
ar2 = np.arange(10,22).reshape(3,4)
ar3 = np.ones((3,4))
ar4 = np.ones((3,5))
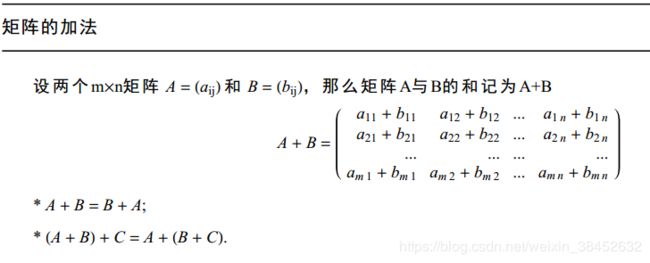
矩阵加法
print(ar1+ar2)
print(ar1+ar2+ar3)
#print(ar1+ar4)
# shape需要相同
# 数与矩阵相乘
ar1 * 10
# 数组与矩阵相乘
print(ar1*ar2)
#print(ar1*ar4)
print('------')
# 数组相乘 → numpy里面两个shape相同的数组可以直接相乘,对应位置的值的乘积为结果
# 如果shape不同,则报错
a1 = np.array([2,3,4])
b1 = np.array([5,6,7]).reshape(3,1) # 转换为列向量
c1 = np.dot(a1,b1)
print(a1.shape,b1.shape,c1.shape)
print(c1,type(c1))
a2 = np.array([
[1,2,3],
[2,3,4]
])
b2 = np.array([
[4,4],
[5,5],
[6,6]
])
c2 = np.dot(a2,b2)
print(a2.shape,b2.shape,c2.shape)
print(c2)
# 矩阵乘法,需要保证第一个矩阵的列数(column)和第二个矩阵的行数(row)相同
# 设 A = (aij) 是一个m×s 矩阵, B = (bij)是一个s×n矩阵,那么规定矩阵A与矩阵B的乘积是一个m×n的矩阵
# 矩阵相乘结果仍为矩阵
# numpy中用.dop()来计算矩阵乘法
# 矩阵乘法:A*B 与 B*A
a3 = np.array([
[-2,4],
[1,-2]
])
b3 = np.array([
[2,4],
[-3,-6]
])
print(np.dot(a3,b3))
print(np.dot(b3,a3))# 矩阵的转置
A = np.array([
[2,0,-1],
[1,3,2]
])
B = np.array([
[1,7,-1],
[4,2,3],
[2,0,1]
])
np.dot(A,B).T逆矩阵
- 设A是数域上的一个n阶矩阵,若在相同数域上存在另一个n阶矩阵B,使得: AB=BA=E ,则我们称B是A的逆矩阵,而A则被称为可逆矩阵。注:E为单位矩阵 → 单位矩阵值为1
- 唯一性:若矩阵A是可逆的,则A的逆矩阵是唯一的
- A的逆矩阵的逆矩阵还是A。记作(A-1)-1=A
- 可逆矩阵A的转置矩阵AT也可逆,并且(AT)-1=(A-1)T (转置的逆等于逆的转置)
- 两个可逆矩阵的乘积依然可逆
-
# 创建A矩阵 A = np.array([ [1,2,3], [2,2,1], [3,4,3] ]) print(A) print(np.linalg.det(A)) # numpy求逆矩阵B → np.linalg.inv() B = np.linalg.inv(A) print(B) print(np.linalg.det(B)) # A*B = E,单位矩阵 E = np.dot(A,B) print(E) print(np.linalg.det(E)) #np.eye(3) # 伴随矩阵 A_bs = B*np.linalg.det(A) print(A_bs) print(np.linalg.det(A_bs))