内存分配算法(FF、BF、MF)
动态分区分配
最近在学习操作系统内存分配方面的知识点,小小的总结一下知识点。
根据进程的实际需要,动态的为之分配内存空间。在实现动态分区分配时,将涉及到分区分配中所用到的数据结构、分区分配算法和分区的分配与回收操作三方面的问题。
我的理解是,动态分区分配是按照作业需要的主存空间大小来分配的,当要装入一个作业时,根据作业需要的主存量查看是否有足够的空闲空间,若有,则按需要量分割一个分区分配给该作业;若无,则作业不能装入。随着作业的装入、撤离,主存空间被分成许多个分区,有的分区被作业占用,而有的分区是空闲的。为了说明哪些区是空闲的,可以用来装入新作业,必须要有一张空闲区说明表。
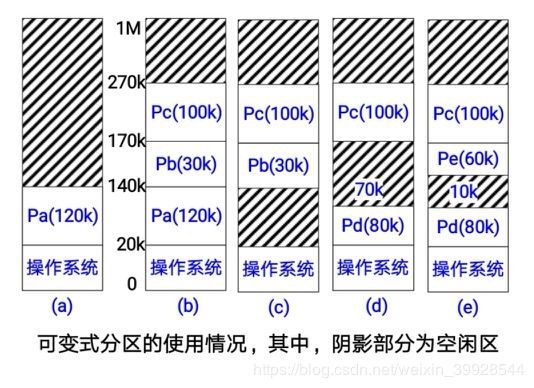
由此也引入了空闲分区表和空闲分区链的概念
-
动态分区分配中的数据结构
- 空闲分区表
意思就是,在系统中设置一张空闲分区表,用于记录每个空闲分区的情况。每个空闲分区占一个表目,表目中包括分区号、分区大小、分区始址等数据项。

- 空闲分区链
为了实现对分区的分配和链接,在每个分区的起始部分设置一些用于控制分区分配的信息,以及用于链接各分区所用的前向指针,在分区尾部设置一些后向指针。通过这些就可以把所有的空闲分区链接成一个双向链。
-
分区分配操作
分配内存和回收内存
- 分配内存
系统应利用某种分配算法,从空闲分区链(表)中找到所需大小的分区。设请求的分区大小为u.size, 表中每个空闲分区的大小可表示为m.size.若m.size-u.size≤size(size是事先规定的不再切割的剩余分区的大小),说明多余部分太小,可不再切割,将整个分区分配给请求者。否则(即多余部分超过size),便从该分区中按请求的大小划分出一块内存空间分配出去,余下的部分仍留在空闲分区链(表)中。然后,将分配区的首址返回给调用者。
- 回收内存
当进程运行完毕释放内存时,系统根据回收区的首址,从空闲区链(表)中找到相应的插入点,此时可能出现以下四种情况之一:
(1)回收区与插入点的前一个空闲分区F1相邻接。 此时应将回收区与插入点的前一分区合并,不必为回收分区分配新表项,而只需修改其前一分区F1的大小。
(2)回收分区与插入点的后一空闲分区F2相邻接。此时也可将两分区合并,形成新的空闲分区,但用回收区的首址作为新空闲区的首址,大小为两者之和。
(3)回收区同时与插入点的前、后两个分区邻接。此时将三个分区合并,使用F的表项和F1的首址,取消F2的表项,大小为三者之和。
(4)回收区既不与F1邻接,又不与F2邻接。这时应为回收区单独建立一一个新表项,填写回收区的首址和大小,并根据其首址插入到空闲链中的适当位置。
-
内存分配算法
-
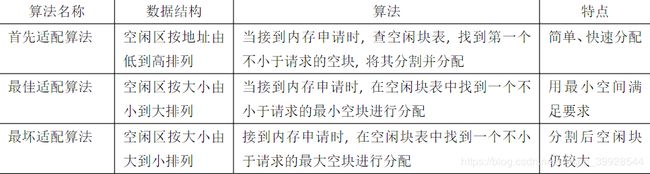
首次适应算法(FirstFit):从空闲分区表的第一个表目起查找该表,把最先能够满足要求的空闲区分配给作业,这种方法的目的在于减少查找时间。为适应这种算法,空闲分区表(空闲区链)中的空闲分区要按地址由低到高进行排序。该算法优先使用低址部分空闲区,在低址空间造成许多小的空闲区,在高地址空间保留大的空闲区。
-
最佳适应算法(BestFit):从全部空闲区中找出能满足作业要求的、且大小最小的空闲分区,这种方法能使碎片尽量小。为适应此算法,空闲分区表(空闲区链)中的空闲分区要按从小到大进行排序,自表头开始查找到第一个满足要求的自由分区分配。该算法保留大的空闲区,但造成许多小的空闲区。
-
最差适应算法(WorstFit):从全部空闲区中找出能满足作业要求的、且大小最大的空闲分区,从而使链表中的结点大小趋于均匀,适用于请求分配的内存大小范围较窄的系统。为适应此算法,空闲分区表(空闲区链)中的空闲分区按大小从大到小进行排序,自表头开始查找到第一个满足要求的自由分区分配。该算法保留小的空闲区,尽量减少小的碎片产生。
-
伙伴算法(buddy):使用二进制优化的思想,将内存以2的幂为单位进行分配,合并时只能合并是伙伴的内存块,两个内存块是伙伴的三个条件是:
1.大小相等
2.地址连续
3.两个内存块分裂自同一个父块(其实只要判断低地址的内存块首地址是否是与父块地址对齐,即合并后的首地址为父块大小的整数倍)使用lowbit等位运算可以o(1)判断。
内存分配算法实现(无伙伴算法):
#include
#include
using namespace std;
#define Free 0 //空闲状态
#define Busy 1 //已用状态
#define OK 1 //完成
#define ERROR 0 //出错
#define MAX_length 640 //最大内存空间为640KB
typedef int Status;
int flag;
typedef struct freearea//定义一个空闲区说明表结构
{
long size; //分区大小
long address; //分区地址
int state; //状态
}ElemType;
// 线性表的双向链表存储结构
typedef struct DuLNode
{
ElemType data;
struct DuLNode *prior; //前趋指针
struct DuLNode *next; //后继指针
}
DuLNode,*DuLinkList;
DuLinkList block_first; //头结点
DuLinkList block_last; //尾结点
Status alloc(int);//内存分配
Status free(int); //内存回收
Status First_fit(int);//首次适应算法
Status Best_fit(int); //最佳适应算法
Status Worst_fit(int); //最差适应算法
void show();//查看分配
Status Initblock();//开创空间表
Status Initblock()//开创带头结点的内存空间链表
{
block_first=(DuLinkList)malloc(sizeof(DuLNode));
block_last=(DuLinkList)malloc(sizeof(DuLNode));
block_first->prior=NULL;
block_first->next=block_last;
block_last->prior=block_first;
block_last->next=NULL;
block_last->data.address=0;
block_last->data.size=MAX_length;
block_last->data.state=Free;
return OK;
}
//分配主存
Status alloc(int ch)
{
int request = 0;
cout<<"请输入需要分配的主存大小(单位:KB):";
cin>>request;
if(request<0 ||request==0)
{
cout<<"分配大小不合适,请重试!"<data.size=request;
temp->data.state=Busy;
DuLNode *p=block_first->next;
while(p)
{
if(p->data.state==Free && p->data.size==request)
{//有大小恰好合适的空闲块
p->data.state=Busy;
return OK;
break;
}
if(p->data.state==Free && p->data.size>request)
{//有空闲块能满足需求且有剩余
temp->prior=p->prior;
temp->next=p;
temp->data.address=p->data.address;
p->prior->next=temp;
p->prior=temp;
p->data.address=temp->data.address+temp->data.size;
p->data.size-=request;
return OK;
break;
}
p=p->next;
}
return ERROR;
}
//最佳适应算法
Status Best_fit(int request)
{
int ch; //记录最小剩余空间
DuLinkList temp=(DuLinkList)malloc(sizeof(DuLNode));
temp->data.size=request;
temp->data.state=Busy;
DuLNode *p=block_first->next;
DuLNode *q=NULL; //记录最佳插入位置
while(p) //初始化最小空间和最佳位置
{
if(p->data.state==Free && (p->data.size>=request) )
{
if(q==NULL)
{
q=p;
ch=p->data.size-request;
}
else if(q->data.size > p->data.size)
{
q=p;
ch=p->data.size-request;
}
}
p=p->next;
}
if(q==NULL) return ERROR;//没有找到空闲块
else if(q->data.size==request)
{
q->data.state=Busy;
return OK;
}
else
{
temp->prior=q->prior;
temp->next=q;
temp->data.address=q->data.address;
q->prior->next=temp;
q->prior=temp;
q->data.address+=request;
q->data.size=ch;
return OK;
}
return OK;
}
//最差适应算法
Status Worst_fit(int request)
{
int ch; //记录最大剩余空间
DuLinkList temp=(DuLinkList)malloc(sizeof(DuLNode));
temp->data.size=request;
temp->data.state=Busy;
DuLNode *p=block_first->next;
DuLNode *q=NULL; //记录最佳插入位置
while(p) //初始化最大空间和最佳位置
{
if(p->data.state==Free && (p->data.size>=request) )
{
if(q==NULL)
{
q=p;
ch=p->data.size-request;
}
else if(q->data.size < p->data.size)
{
q=p;
ch=p->data.size-request;
}
}
p=p->next;
}
if(q==NULL) return ERROR;//没有找到空闲块
else if(q->data.size==request)
{
q->data.state=Busy;
return OK;
}
else
{
temp->prior=q->prior;
temp->next=q;
temp->data.address=q->data.address;
q->prior->next=temp;
q->prior=temp;
q->data.address+=request;
q->data.size=ch;
return OK;
}
return OK;
}
//主存回收
Status free(int flag)
{
DuLNode *p=block_first;
for(int i= 0; i <= flag; i++)
if(p!=NULL)
p=p->next;
else
return ERROR;
p->data.state=Free;
if(p->prior!=block_first && p->prior->data.state==Free)//与前面的空闲块相连
{
p->prior->data.size+=p->data.size;
p->prior->next=p->next;
p->next->prior=p->prior;
p=p->prior;
}
if(p->next!=block_last && p->next->data.state==Free)//与后面的空闲块相连
{
p->data.size+=p->next->data.size;
p->next->next->prior=p;
p->next=p->next->next;
}
if(p->next==block_last && p->next->data.state==Free)//与最后的空闲块相连
{
p->data.size+=p->next->data.size;
p->next=NULL;
}
return OK;
}
//显示主存分配情况
void show()
{
int flag = 0;
cout<<"\n主存分配情况:\n";
cout<<"++++++++++++++++++++++++++++++++++++++++++++++\n\n";
DuLNode *p=block_first->next;
cout<<"分区号\t起始地址\t分区大小\t状态\n\n";
while(p)
{
cout<<" "<data.address<<"\t\t";
cout<<" "<data.size<<"KB\t\t";
if(p->data.state==Free) cout<<"空闲\n\n";
else cout<<"已分配\n\n";
p=p->next;
}
cout<<"++++++++++++++++++++++++++++++++++++++++++++++\n\n";
}
//主函数
int main()
{
int ch;//算法选择标记
cout<<"请输入所使用的内存分配算法:\n";
cout<<"(1)首次适应算法\n(2)最佳适应算法\n(3)最差适应算法\n";
cin>>ch;
while(ch<1||ch>3)
{
cout<<"输入错误,请重新输入所使用的内存分配算法:\n";
cin>>ch;
}
Initblock(); //开创空间表
int choice; //操作选择标记
while(1)
{
show();
cout<<"请输入您的操作:";
cout<<"\n1: 分配内存\n2: 回收内存\n0: 退出\n";
cin>>choice;
if(choice==1) alloc(ch); // 分配内存
else if(choice==2) // 内存回收
{
int flag;
cout<<"请输入您要释放的分区号:";
cin>>flag;
free(flag);
}
else if(choice==0) break; //退出
else //输入操作有误
{
cout<<"输入有误,请重试!"<