霍夫变换 Hough Transfom(附Matlab实验代码)
前言
在学习过程中,我发现许多文章一上来就介绍Hough变换的特点和数学原理,却忽视了Hough变换的使用场景(在边缘检测之后使用),因此很容易让人捉摸不透。在本文中,大家可以关注一下这一点。
一、Hough变换使用场景
我们先通过边缘检测,得到了幅值超过某个阈值的像素集合,即边缘像素。我们想知道,这些边缘像素是否连成直线,即验证这些边缘像素是否在某直线上。为此,我们可以采用Hough变换。
二、Hough变换用于直线边缘检测
我们猜测:边缘像素点A:![]() 和B:
和B:![]() 在一条直线上:
在一条直线上:![]() 。我们希望通过Hough变换,验证我们的猜测。
。我们希望通过Hough变换,验证我们的猜测。
注意,我们往往不知道直线的具体参数,即我们只能先假设存在边缘直线![]() ,然后再找出斜率和纵坐标的具体值。
,然后再找出斜率和纵坐标的具体值。
一句话:我们现在只有边缘像素点集合![]() ,任务是:一,验证是否在直线上;二,找出k和q的具体值。
,任务是:一,验证是否在直线上;二,找出k和q的具体值。
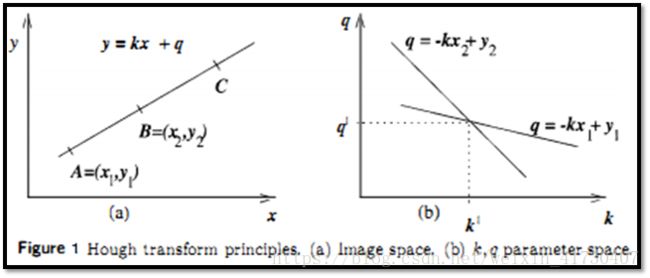
继续。我们把点A和点B代入方程![]() 中,经过变形,我们可以得到两条直线方程:
中,经过变形,我们可以得到两条直线方程:
![]()
![]()
如上方右图所示。注意,此时k和q是变量,因此两条直线位于参数空间中。
如果A和B确实是![]() 上的两个点,那么这两条直线方程就一定会经过
上的两个点,那么这两条直线方程就一定会经过![]() 点!并且,这个交点是唯一的!因为,A和B只能唯一确定一条直线!
点!并且,这个交点是唯一的!因为,A和B只能唯一确定一条直线!
总结、拓展:
1、我们把每一个样本坐标![]() ,代入我们猜测的直线方程
,代入我们猜测的直线方程![]() 中,都能得到一条直线
中,都能得到一条直线![]() 。
。
2、这一条直线上包括无穷多个离散的![]() 坐标对。
坐标对。
3、因此,由边缘像素点集![]() ,可以计算得到多条直线,每一条直线都有对应的坐标集合。
,可以计算得到多条直线,每一条直线都有对应的坐标集合。
4、如果![]() 确实在同一条直线
确实在同一条直线![]() 上,那么直线簇
上,那么直线簇![]() 一定会交于同一点,交点坐标就是
一定会交于同一点,交点坐标就是![]() 。
。
5、具体方法是:我们选择若干可能的k和若干可能的q,作为备选参数对。若某个离散坐标对![]() 恰好出现在某个备选参数对附近,那么该参数对就计数+1;显然,
恰好出现在某个备选参数对附近,那么该参数对就计数+1;显然,![]() 的计数次数是最多的。
的计数次数是最多的。
出现次数可以构成一个矩阵A(k,q),我们称之为累次数组,非常形象。进一步说:
如果累次数组在某![]() 处存在峰值,那么就说明:原图像空间可能存在直线边缘
处存在峰值,那么就说明:原图像空间可能存在直线边缘![]() ,并且峰值就是处于
,并且峰值就是处于![]() 上的边缘像素点的数目。
上的边缘像素点的数目。
显然,由于是基于统计峰值得到的结果,因此Hough变换对图像中直线的残缺部分、噪声以及其它共存的非直线结构不敏感。
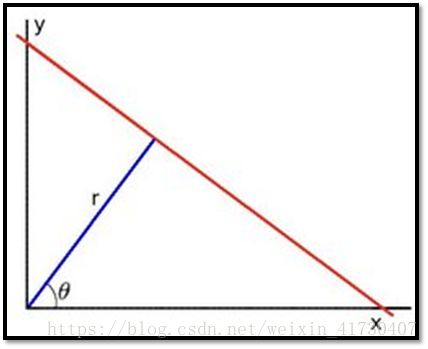
在检测垂直线条和参数非线性离散化时,斜率表示会遇到困难。为此,我们常把直线表示为:
![]()
可以证明以下结论:
1) 图像空间中的一个点,对应空间中的一条正弦曲线:
![]()
和差化积可证。
2) 图像空间中的一条直线,对应空间中存在一个公共点的一簇曲线。
公共点为![]() ,对应直线就是:
,对应直线就是:
![]()
基于上述结论,直线检测过程同理:
1) 边缘检测,得到若干边缘像素。
2) 预估并规定有限、离散的集合,得到累计数组。
3) 每一个都可以得到一条正弦曲线;如果曲线经过某参数对所在区域,就计数+1。
4) 统计累计数组的峰值。如果在某参数对![]() 处存在峰值C,则可能存在直线边缘:
处存在峰值C,则可能存在直线边缘:![]()
且直线上的边缘像素个数为C。
三、Hough变换用于圆边缘检测
假设在原始空间中,存在一个圆心为![]() 的圆:
的圆:
![]()
该圆上的点组成组成一个集合![]() 。
。
假设通过边缘检测,其中若干离散点被检测为边缘像素点。Hough变换:
1) 根据![]() 和假设圆方程
和假设圆方程![]() ,计算出轨迹:
,计算出轨迹:
![]()
2) 在事先预测的、可能的参数对![]() 集合中,如果轨迹经过某参数对附近,那么该参数对计数+1。
集合中,如果轨迹经过某参数对附近,那么该参数对计数+1。
3) 统计累计数组![]() 的峰值C。
的峰值C。
显然,由于这些点都满足:
![]()
因此圆轨迹一定都经过![]() 。即
。即![]() 一定是统计峰值点,并且原图像空间中,处在圆
一定是统计峰值点,并且原图像空间中,处在圆![]() 上的边缘像素点数目为C。
上的边缘像素点数目为C。
当然,如果有多个峰值点,就有多个目标。在这里就不详述了。
四、检测圆实验
实验所用圆图片和代码下载:https://download.csdn.net/download/weixin_41730407/10467900
实验思想见代码注释。
实验结果:(高斯噪声;Roberts算子)


实验代码:
function CurveDetectionbyHough
%~~~~~~~~~~~~~~~~~~~~~~~第四次数图实验说明~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~%
% 1、实验最初,需要选择其中一种加噪方式。
% 2、边缘检测后,需要观察、选择其中一个算子继续处理,以减小程序耗时。
% 3、简化实验参数range、delta、min都是预实验得到的最佳参数,不建议更改。
% 4、坐标系:→x坐标
% ↓ y坐标
% 原点为(1,1)
% 2018-5-22 by XING
%~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~%
clear;close all;clc;
fprintf('**********************加噪图像曲线检测实验**********************\n');
I = im2double(rgb2gray(imread('houghorg.bmp')));
fprintf('\n~~~~~~~~~~~~~~~Part0: 图像加噪~~~~~~~~~~~~~~~\n');
fprintf(' 选择添加噪声类型:\n');
option=input(' Gaussian(1) or Salt(2):\n ');
if(option==1)
I_noised=imnoise(I,'gaussian',1e-3);
else
I_noised=imnoise(I,'salt & pepper',1e-3);
end
[height,width] = size(I_noised);
figure;
subplot(1,2,1),imshow(I);
title('\fontsize{20}Original');
subplot(1,2,2),imshow(I_noised);
title('\fontsize{20}Noised');
fprintf('\n~~~~~~~~~~~~Part1: 图像滤波和边缘检测~~~~~~~~~~~~');
%% Median Filtering
m=9;
I_smooth = medfilt2(I_noised,[m m]);% 9x9中值滤波
%% Edge Detection
% Roberts
IRoberts=edge(I_smooth,'Roberts');
figure;
subplot(1,3,1),imshow(IRoberts);
title('\fontsize{20}Roberts');
% Sobel
ISobel=edge(I_smooth,'Sobel');
subplot(1,3,2),imshow(ISobel);
title('\fontsize{20}Sobel');
% Laplacian
ILap=edge(I_smooth,'log');
subplot(1,3,3),imshow(ILap);
title('\fontsize{20}Laplacian');
suptitle('\fontsize{20}Edge Detection');
fprintf('\n 对比发现,Roberts边缘检测噪点最少,后续计算量最小,因此建议选择。');
fprintf('\n 选择算子类型:\n');
option=input(' Roberts(1) or Sobel(2) or Laplacian(3):\n ');
close all;
if(option==1)
IEdge=IRoberts;
elseif(option==2)
IEdge=ISobel;
else
IEdge=ILap;
end
figure;
subplot(1,3,1),imshow(I);
title('\fontsize{20}Original');
subplot(1,3,2),imshow(I_noised);
title('\fontsize{20}Noised');
subplot(1,3,3),imshow(IEdge);
title('\fontsize{20}Edge Detection')
% 将边缘点坐标放在数组X和Y中,以便后续操作。
totalnum=sum(sum(IEdge));
X=zeros(1,totalnum);
Y=zeros(1,totalnum);
k=0;
for x=1:width
for y=1:height
if IEdge(y,x)% 是轨迹点 一定要注意是y(行) x(列)
k=k+1;
X(k)=x;
Y(k)=y;
if k==totalnum
break;
end
end
end
if k==totalnum
break;
end
end
fprintf('\n~~~~~~~~Part2: 圆检测和重建叠加(Hough变换)~~~~~~~~');
%% Curve Detection by Hough
% assume that (x-a_0)^2+(y-b_0)^2=r^2
% parameter equation: (a-x_i)^2+(b-y_i)^2=r^2
% 坐标系:→x坐标
% ↓ y坐标
% 原点为(1,1)
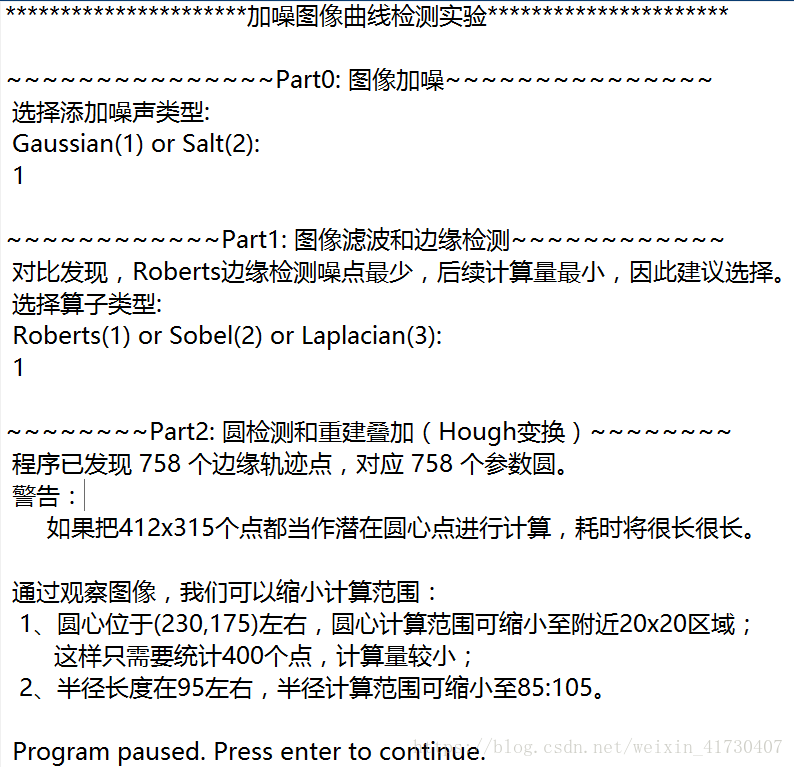
fprintf(' \n 程序已发现 %d 个边缘轨迹点,对应 %d 个参数圆。\n',totalnum,totalnum);
fprintf(' 警告:\n');
fprintf(' 如果把412x315个点都当作潜在圆心点进行计算,耗时将很长很长。\n');
fprintf('\n 通过观察图像,我们可以缩小计算范围:\n');
fprintf(' 1、圆心位于(230,175)左右,圆心计算范围可缩小至附近20x20区域;\n');
fprintf(' 这样只需要统计400个点,计算量较小;\n');
apro_min=220;
bpro_min=165;
range=20;
APRO=(apro_min:apro_min+range-1)';
BPRO=(bpro_min:bpro_min+range-1)';
fprintf(' 2、半径长度在95左右,半径计算范围可缩小至85:105。\n');
r_min=85;
range2=20;
fprintf('\n Program paused. Press enter to continue.\n');
pause;
% 求解二元隐函数非常非常复杂。我们反过来,在20x20方阵内,逐点验证是否可能为参数圆的轨迹点。
% 误差delta可调,在正负delta内都算有效解。预实验建议值为25。
% 预实验说明,当delta较小时,最大频次很小,统计误差很大。
delta=50;
r_step=0.5;
count=0;
A_Maxpro=[];
B_Maxpro=[];
RMAXNUM=[];
tic;
for r=r_min:r_step:r_min+range2 % 半径也取决于统计峰值
count=count+1;
Frequency=zeros(range,range);% 该20x20方阵点出现在参数圆轨迹中的次数
for k=1:totalnum %逐个样本
left=repmat(((APRO-X(k)).^2)',range,1)+repmat((BPRO-Y(k)).^2,1,range);
right=r^2;
Difference=round(left-right);
ISSOLUTION=(Difference-delta);
Frequency=Frequency+ISSOLUTION;
end
maxFrequency=max(Frequency(:));% 找出统计峰值
[b_maxpro,a_maxpro]=find(Frequency==max(Frequency(:)));% 具有统计峰值,意味着该点最有可能是圆心(a_0,b_0)
A_Maxpro=[A_Maxpro;a_maxpro];
B_Maxpro=[B_Maxpro;b_maxpro];
RMAXNUM=[RMAXNUM;maxFrequency];
% 以上三者,记录的是在某一个r下的统计峰值和圆心坐标
end
final_max_Rposition=find(RMAXNUM==max(RMAXNUM));
R=r_min+(final_max_Rposition-1)*r_step;% 在所有r下的最大峰值对应的半径r
final_a_pro=A_Maxpro(final_max_Rposition)+apro_min;
final_b_pro=B_Maxpro(final_max_Rposition)+bpro_min;
fprintf(' \n Hough圆形边缘检测结果:Centre=(%d,%d),Radius=%.1f。\n',final_a_pro,final_b_pro,R);
fprintf(' Hough检测耗时:%.3f s。\n', toc);
%% Image Superposition
% Restruction
IRe=zeros(height,width);% 再次注意先行数后列数
delta2=1;
for m=1:height
for n=1:width
r_cal=sqrt((n-final_a_pro)^2+(m-final_b_pro)^2);
if (r_calR-delta2)
IRe(m,n)=1;
end
end
end
IRe=IRe+IEdge;
close all;
figure;
subplot(2,2,1),imshow(I);
title('\fontsize{20}Original');
subplot(2,2,2),imshow(I_noised);
title('\fontsize{20}Noised');
subplot(2,2,3),imshow(IEdge);
title('\fontsize{20}Edge Detected');
subplot(2,2,4),imshow(IRe);
title('\fontsize{20}Reconstructed');
fprintf('\n**********************第四次数图实验结束**********************\n');
fprintf(' Written by XING\n');
fprintf(' 2018-5-22 Beijing\n');
end