基于视觉的自寻物小车(openmv+arduino)
断断续续学openmv和arduino一个月,所以没什么编程基础,所以这个写的比较简单,只希望作为引子记录一下第一个小实验然后好好把视觉一只学下去,虽然现在看来很简单,但入门时可谓处处碰壁,做出来还是挺开心。话不多说,开始介绍吧。
所需基本知识:串口通讯,字符串处理,电机控制,识别色块,arduino编程基础(C/C++),会调用openmvIde里的一些函数,会配置和使用openmv
材料清单;
6v电机2;
openmv4;
arduinomega2560;
l298n电机驱动1;
小车底座;
牛眼轮1;
普通轮胎2;
电源;
蓝色物料;
思路: 通过UART在openmv和arduino之间通信,openmv识别物料并确定物料中心坐标发送给arduino,arduino接收并读取字符串,然后设定一个阈值(中心点的值),用if else对阈值进行比较 ,大于阈值也就是在右侧,小于阈值在左侧。
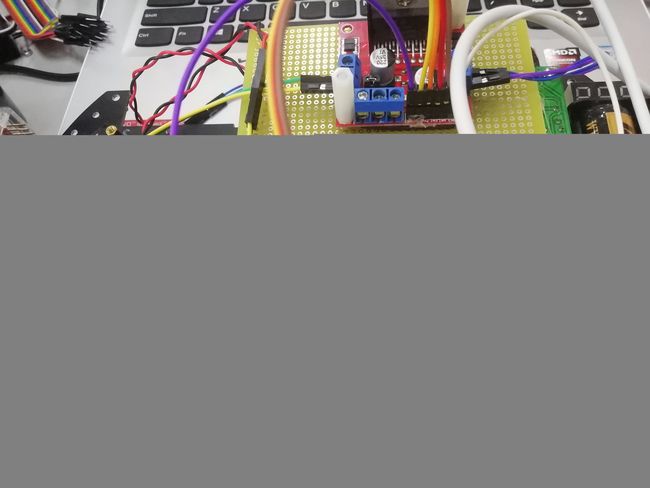
附上接线图(不含电源) :openmv p4脚(TX)接arduino 10脚(RX),gnd接gnd(共地),l298n 逻辑输入口(1-4)分别接arduino6,7,8,9脚
使能端接5,11脚
arduino程序
#include
SoftwareSerial softSerial(10,11); //定义软串口,rx为10号端口,tx为11号端口
int x;
int input1 = 6; //定义输出引脚
int input2 = 7; //定义输出引脚
int input3 = 8; //定义输出引脚
int input4 = 9; //定义输出引脚
int ENA=5;//定义使能端引脚(下同)
int ENB=11;
void setup()
{
pinMode(input1,OUTPUT);//下列配置各引脚为输出模式
pinMode(input2,OUTPUT);
pinMode(input3,OUTPUT);
pinMode(input4,OUTPUT);
pinMode(ENA,OUTPUT);
pinMode(ENB,OUTPUT);
softSerial.begin(9600); //初始化虚拟串口
Serial.begin(9600); //初始化硬串口
}
String A_String = "";//定义用来存数据的字符串
void loop()
{
if (softSerial.available() > 0) //判断软串口是否接收到openmv数据,然后读取,然后在串口监视器打印
{
if(softSerial.peek() != '\n')
{
A_String += (char)softSerial.read();//把串口读的单个字符逐加到字符串
}
else
{
softSerial.read();
x=A_String.toInt();//把字符串转成int类型存放
if(x>80)//坐标和阈值进行判断
{
Serial.println("1");//串口打印数字1
Serial.println(x);//串口打印坐标
left();//左转
}
else if(x<80)
{
Serial.println("2");//串口打印数字2
Serial.println(x);//串口打印坐标
right();//右转
}
else
{
stop1();//停转
}
A_String = "";//重置字符串
}
}
}
void right() //右转
{
analogWrite(ENA,240);
digitalWrite(input1,HIGH);
digitalWrite(input2,LOW);
digitalWrite(input3,LOW);
digitalWrite(input4,LOW);
}
void stop1()//停转
{
digitalWrite(input1,LOW);
digitalWrite(input2,LOW);
digitalWrite(input3,LOW);
digitalWrite(input4,LOW);
}
void left()//左转
{
analogWrite(ENB,240);
digitalWrite(input1,LOW);
digitalWrite(input2,LOW);
digitalWrite(input3,HIGH);
digitalWrite(input4,LOW);
}
openmv程序
import sensor, image, time
from pyb import UART
import json
bule_threshold = (48,12,-19,33,-49,-14)//蓝色的阈值
sensor.reset() # Initialize the camera sensor.
sensor.set_hmirror(True)
sensor.set_vflip(True)
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QQVGA)
sensor.skip_frames(10)
sensor.set_auto_whitebal(False)
clock = time.clock()
uart = UART(3, 9600)//串口波特率需要和arduino一致 这里设为9600
def find_max(blobs):
max_size=0
for blob in blobs:
if blob.pixels() > max_size:
max_blob=blob
max_size = blob.pixels()
return max_blob //寻找最大色块并返回最大色块的坐标
while(True):
img = sensor.snapshot()//采集图像
blobs = img.find_blobs([blue_threshold])
if blobs:
max_blob=find_max(blobs)
img.draw_rectangle(max_blob.rect())//框选最大色块
img.draw_cross(max_blob.cx(), max_blob.cy())//在最大色块中心画十字
pcx = max_blob.cx()//定义pcx为最大色块中心的横坐标
output_str=json.dumps(max_blob.cx()) //把pcx用json字符串的形式发送给arduino
uart.write(output_str + '\r\n')
print(pcx)//打印输出pcx
else:
print('not found!')